
浮泥现场观测技术综述
2014-02-28 06:06王元叶王钟寅
重庆交通大学学报(自然科学版) 2014年1期
居 尧,高 敏,王元叶,王钟寅
(1.上海航道勘察设计研究院,上海 200120;2.交通运输部长江口航道管理局,上海 200003;3.上海河口海岸科学研究中心,上海 201201)
通常认为,浮泥是一种主要存在于淤泥质河口海岸地区常见的自然现象[1-2],是贴近底床的一层流动性很大的高含沙水体,与上层水体之间有明显的分界面。C.C.Inglis,等[3]在研究Thames河的泥沙运动时最早使用了“Fluid Mud”一词。在20世纪50年代,我国科研人员研究天津新港回淤问题时提出了“浮泥”这一中文术语。浮泥在挖深的航槽和港池中最为常见,当浮泥厚度较大时,容易造成骤淤,导致通航水深的下降,影响船舶的通行[4-7]。
为研究浮泥的运动特性及其与适航水深之间的关系,有必要对浮泥的厚度、流变特性、密度等重要参数进行现场观测。国内外针对悬沙测量物理测试仪器的研究已有较长的历史,理论成果及测量仪器种类繁多,但是实际投入使用并且得到较好成果的产品却很有限。从浮泥问题研究的发展历程来看,使用较多且效果相对较好的测量方法主要有:测深砣法、γ射线原理测量法、超声波原理测量法、音叉密度测量法、耦合测量法等。
1 测深砣法
测深砣法主要利用浮力原理进行某一重度的浮泥界面的深度测量,典型的应用是天津航道局为测量天津港巨厚浮泥层而开发的三爪砣。该仪器制作相对简单,操作简便。
1.1 仪器结构
JTJ 203—94《水运工程测量规范》中对于三爪砣的结构有详细的图解,三爪砣主要由3个张开的竹片网和1个铅坠组成,见图1。
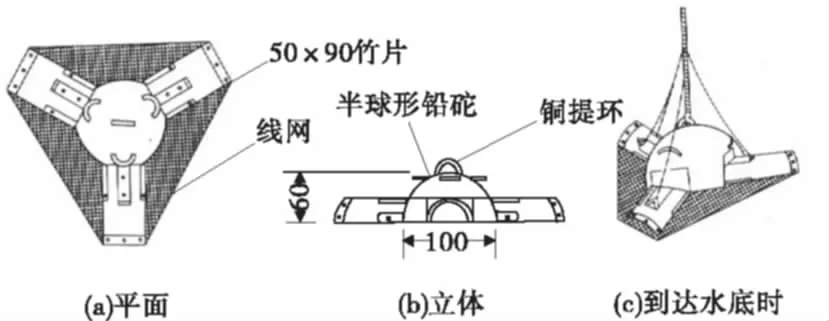
图1 三爪砣结构 (单位:mm)Fig.1 Structure of three-wings-lead
1.2 测量原理
将三爪砣放入水中时,随着浮泥层重度的增加和三爪砣竹片及线网的展开,浮力逐渐变大,当浮泥层密度达到三爪砣设计值时,仪器受力平衡不再下沉,即可以通过绳尺量得该密度界面的深度。可以通过改变其重量和尺寸从而可测出不同密度泥层的深度[8-9]。
1.3 应用及简析
三爪砣使用的优点是仪器制作简单、成本低廉、操作简便。但在实际应用中应注意以下几方面问题:
1)经过天津港一系列相关实验表明,根据规范的规格制作的三爪砣,能够测量的浮泥重度为1 200~1 250 g/L。因此,在测量前应明确待测浮泥层的大致重度值范围,需要相应地改变三爪砣的尺寸进行匹配,并且在使用前进行标定。
2)三爪砣的测量精度受到制造精度、测量水域风浪及水动力情况、浮泥黏度、测量人员主观判断等多方面因素影响,总体精度不高[8-10]。
3)该方法只能粗略测得仪器相对浮泥密度层的深度,测量成果单一,价值有限。
2 γ射线技术测量法
具有代表性的γ射线测量仪器有比利时和英国共同研制的 Navitracker 密度测量系统,荷兰生产的高精度的 VDP 泥沙浓度剖面探测器[11],以及国内使用较多的平行双管叉式γ射线密度仪等。
2.1 仪器结构
平行双管式γ射线密度仪由探头和记录仪两部分组成,图2为探头部分[12]。双管底端各安装有放射源和探测器。记录仪安置在测量船上,通过电缆和探头连接。
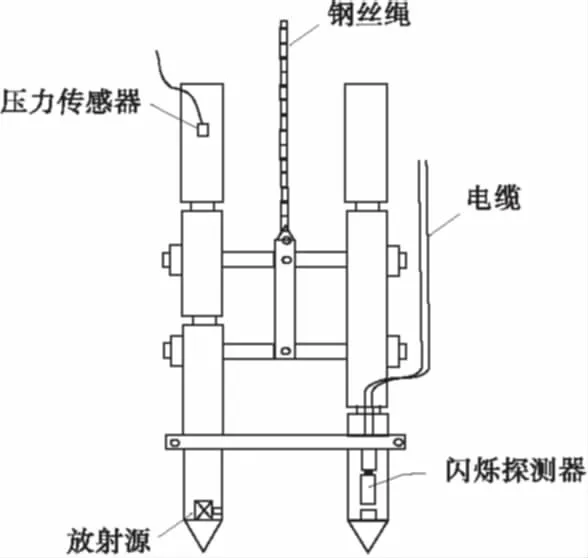
图2 平行双管叉式γ射线密度仪探头Fig.2 Probe of double-barreled γ-ray densitometer
2.2 测量原理
当γ射线穿过物质时,其透射的γ射线强度随着介质密度增大而呈指数规律衰减。据此可以通过测量透射γ射线计数率计算物质的密度。在水饱和状态下,γ射线透射法测量浮泥容重的理论计算公式为[13-15]:
(1)式中:ρ为浮泥或淤泥密度,g/cm3;ρw为河水或海水密度,g/cm3;ρs为泥沙密度,g/cm3;μw为河水或海水的γ射线质量吸收系数,cm2/g;μs为泥沙的γ射线质量吸收系数,cm2/g;d为γ射线装置至γ射线探测器中心的距离,cm;CRw为清水中仪器γ射线测量计数率,s-1;CR为仪器的γ射线测量计数率,s-1。
如果放射源、探测器、源距和探头结构等相对确定,在一定的测量范围内μs,μw,ρs,ρw,d,CRw均为定值,浮泥或者淤泥重度ρ只随CR值变化,即可通过测得CR值得到ρ值。
2.3 应用及简析
γ射线测量法在我国多个河口地区工程水域的浮泥现场观测中得到应用,如上海港杭州湾深水航道试挖槽浮泥和淤泥重度测量,瓯江口航道治理一期工程后和乐清湾港区浮泥容重测量等多项实际工程[13-15],为分析研究港池、航道回淤速度、固结程度等问题提供了重要实测资料。李樟苏,等[14]结合理论及现场使用情况认为,采用241Amγ源的γ射线密度仪可测量的淤泥重度达到1.7g /cm3,结合探头使用灵活的特点,该方法既能测量原状浮泥又能测量原状淤泥重度。
γ射线测量方法层次分辨率高、测量泥沙容重精度高,在工程中应用效果较好,在实际使用中应注意以下几方面问题:
1)该方法为点测法,即在现场进行逐点测量,与超声波走航式测量方法相比,速度较慢。在进行大面积工程水域观测时,测点布置不宜太密,在测量的同时最好配合进行同步底质取样。
2)该方法将影响γ射线吸收的一系列参数考虑为与环境相关的常数,对于不同测区需要进行准确的仪器率定[16],增加了工作量及误差来源[17]。
3)探头内安放有一定活性的放射性同位素,对人员及环境存在一定的潜在危险。这是导致γ射线法目前使用率越来越低的主要原因。
3 超声波测量法
根据超声波仪器的设计原理、具体可分为双频测深仪法、声学泥沙剖面仪法以及声学密度仪法等3种方法。
3.1 双频测深仪法
3.1.1 仪器结构
以美国Odom公司生产的Echotrac MK III双频测深仪为例,测量系统包括用于发射和接收声波的换能器以及记录器(图3)。在使用时还需要配备GPS导航以及连接记录器的测量用计算机。

图3 Odom Echotrac MK III 双频测深仪换能器及记录器Fig.3 Transducer & describer of dual frequency sounder Odom Echotrac MK III
3.1.2 测量原理
超声波测深仪的基本工作原理是利用超声波能够在均匀介质中匀速直线传播,遇到不同介质面产生反射的特性,根据机械运动结构的位移量或电子设备的脉冲数来模拟超声波在水中往返传播的一半时间所经过的距离,通过换能器向水下发射超声波并接收回波,由超声波的往返传输时间换算出水深值[18]。
双频测深仪在常用单频高频测深仪的基础上增加了低频部分,高低频的发射和接收组件以及信号的处理是相对独立的[19]。高频声波的频率高、波长短、束射特性好,方向性强,众多的现场实践表明,用200 kHz左右高频频率测定的海底表面效果较好。但是由于高频波长短,能量损失快,波束对漩涡、湍流等穿透能力差,在水文条件较复杂的水域有时可能回波信号可能丢失[18]。低频频率通常选择20~50 kHz之间,具有较长波长的低频超声波在传播过程中碰到几何尺寸比波长短的障碍物时由于透射而继续传播,因此在有水底沉积物时低频声波可能穿过水底表面较为疏松的部分而向下传播到更深处。在水下除了水体与浮泥层之间有分界面,还有浮泥层与淤泥层之间、密度不同的淤泥层之间的各分界面,声波信号传递到这些分界面上时也会产生回波,低频声波能够穿透浮泥层及密度相对较小的淤泥层向下传播,但是高频超声波无法穿透浮泥层[19],因此,双频测深仪的测深结果包含更详细的地形以及沉积物的信息。
3.1.3 应用及简析
双频测深仪法将回波的上、下界面简单考虑为浮泥的上、下界面,从而快速的判断浮泥层的厚度[20],并且通过船载走航观测进行大范围的测量。通过一些现场测试表明,影响双频测深仪测量成果最主要的问题是回波界面与浮泥密度之间难以确定明确的对应关系[21],浮泥密度垂向分布规律较为复杂,若单一的使用双频测深仪进行测量,两个反射界面的密度值无法准确地定性说明,需要在现场利用γ密度仪或音叉密度仪同步拉垂线进行率定,确定不同回波界面对应的重度值。
3.2 声学泥沙剖面仪法
声学泥沙剖面仪是一类通过测量剖面悬沙分布得到浮泥分布情况的仪器,常见的如英国产AQUAscat向后散射泥沙浓度剖面仪、中科院东海研究站研制的ASSM声学悬沙剖面仪等。
3.2.1 仪器结构
以AQUAtec公司生产的AQUAscat1000为例,声学换能器与主机一体(图4),共有4个频率,范围为500 kHz~5 MHz[22]。

图4 AQUAscat1000泥沙浓度剖面仪Fig.4 AQUAscat 1000 acoustic section plotter
3.2.2 测量原理
ASSM测量系统和AQUAscat1000均采用了声学后向散射技术(Acoustic Backscatter System),AQUAscat1000最多可以设置4个声学换能器,各自采用不同的声学频率发射(500 kHz~5 MHz),通过软件可以进行剖面间距的设置,从2.5 mm至几厘米[23]。ABS对于粗颗粒悬沙的灵敏度高于OBS光学后向散射系统,OBS对细颗粒悬沙的灵敏度更好。相对于双频测深仪而言,声学泥沙剖面仪在测量精度上有所提高。由于在推导时需要假设悬沙浓度较小,粒子间不发生相互作用,声学剖面仪的量程普遍较小[21-22],ASSM系统观测悬浮泥沙浓度的范围为0.1~5.0 kg/m3,含沙量高于5.0 kg/m3时,只能定性地测量变化趋势,无法准确测量浓度值[23]。AQUAscat1000在1m剖面深度内的量程为0.1 ~20 kg/m3,缩短剖面的深度可以提高量程。
3.2.3 应用及简析
1994年以来,ASSM系统在长江口多次被用于观测悬浮泥沙并且得到大量的剖面数据,用于进行沉积物的相关研究中,但是由于其测量量程的限制,实用性较差,在浮泥现场观测方面鲜有应用。
3.3 声学密度仪法
3.3.1 仪器结构
常见的声学密度仪包括国产的SDM型超声波浓度计、中科院东海研究站研制的超声波浮泥重度测量仪以及20世纪70年代法国研制的SD105淤泥密度计等。声学密度仪的声学部分由发射换能器和接收换能器组成,两者通常安装在同一水平轴线上(图5)。

图5 国产SDM型超声波浓度计探头Fig.5 Transducer of SDM ultrasonic densitometer
3.3.2 测量原理
声学密度仪应用了声波幅度衰减原理,考虑了高浓度情况下粒子间的相互作用,认为当含沙量大于10 kg/m3时,粒子间的相互作用不能忽略,此时会产生多次散射波和黏滞损耗,声衰减系数与浓度成正比。发射换能器带有方向性,以恒定的发射功率集中能量射向接收换能器,超声波在浮泥中传播时,产生散射波和粘滞波,引起声衰减,通过率定即可根据实测声衰减推得测点的浮泥密度[22,24]。
3.3.3 应用及简析
国产SDM型超声浓度计能够测量的含沙量范围为2~800 kg/m3,已经应用于水土流失含沙量的长期监测,以及小浪底水库深达60 m的泥沙淤积测量(含沙量大于500 kg/m3)等实际工程监测中。声学密度仪在一定程度上克服了声学剖面仪的不足,在操作方式和成果类型上与γ射线密度计类似,并且能够达到较高的浮泥观测精度。另一方面,由于观测精度依赖于声衰减系数与浮泥密度的率定关系,对于实验操作要求较高[25]。
4 音叉密度测量法
4.1 仪器结构
目前常见的音叉密度计为荷兰Stema公司生产的Rheotune音叉密度计,测量系统包括音叉探头、控制盒以及测量用计算机等,见图6。探头及主机之间通过电缆连接,主机连接测量用计算机以及电源。在使用时通过船载小型绞车吊放音叉探头,在观测点进行垂线测量。

图6 音叉密度计控制盒(左)及探头(右)Fig.6 Controlbox (left) and probe (right) of tuning fork
4.2 测量原理
在电子电源的控制下,音叉的一条叉臂以一定的频率震动,另外一条叉臂则会产生谐振。因为谐振频率和电压值与所插入的介质的流变特性和密度有关,所以对谐振频率和电压值进行分析计算就可以得到介质的流变特性和密度值[26]。音叉密度计的使用方式与γ射线密度计和声学密度计基本一致,结果形式更加丰富,包含了现场浮泥的流变参数。
4.3 应用及简析
音叉密度计的稳定性和测量精度与γ射线密度计相仿,但明显高于声学密度计。由于仪器内置温度传感器可以测得介质温度,加上仪器本身具有测量介质流变特性的功能,所以仪器可以对密度值进行自动校正,在很大程度上减小了测量过程中操作人员认为因素造成的误差,对于提高测量精度起到较大的作用[26]。由于音叉密度测量的诸多优势,近几年来应用日趋广泛,有取代γ射线密度计和声学密度计的趋势。
5 耦合测量法
近年来,部分厂家开始尝试耦合多种浮泥观测手段进行适航水深观测,荷兰Stema公司出品的SILAS适航水深测量系统即为整合双频测深仪及Rheotune音叉密度计的复合观测系统。
5.1 仪器结构
SILAS系统主要由Odom ECHOTAC MKIII双频测深仪、Rheotune音叉密度计、GPS导航仪以及测量用计算机组成。
5.2 测量原理
该系统利用双频测深仪测量高低频水深和记录声强信号、采用Rheotune音叉密度仪测得的特征点的浮泥密度、屈服应力、黏滞系数等参数对回波信号强度进行率定,建立密度和反射信号之间的关系,就可以得到整个测线剖面不同层面的密度值。
5.3 应用及简析
双频和音叉的耦合方法克服了双频测深仪数据精度不高、音叉密度仪测量点不连续等不足,在近几年得到了大量的应用[10,26-30]。通过在珠江口及连云港等地的试验表明,该系统可以及时准确地测量出航道内浮泥层厚度,在解决适航水深问题、台风过后港池水深的观测、指导疏浚船舶疏浚施工等方面提供了有效的解决方案。目前长江口北槽深水航道常规浮泥观测主要采用SILAS系统,结合现场浮泥取样进行分析。但是,SILAS系统仍然存在一些有待解决的问题:
1)SILAS测量系统并未内置潮位校正,其实测适航水深需要依赖外部的潮位校正手段进行修正。
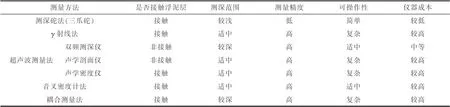
2)Rheotune音叉密度计实测数据也需要进行后期的人工处理从而标定双频数据。标定过程较为复杂,加大了内业处理的难度,在一定程度上制约了成果利用的响应速度。表1为各种测量方法的综合对比情况。
表1 浮泥现场测量方法比较
Table 1 Comparison among field observation technologies of fluid mud
6 结 语
浮泥现场观测技术伴随着浮泥问题的提出不断地发展,为深入研究浮泥的生成机理,运移规律等提供重要的基础资料。浮泥观测仪器或系统多种多样,目前使用较多、效果较好的是基于声学原理的测量仪器、音叉以及复合的SILAS系统。γ射线法观测成果较好,但是由于γ放射源存在一定的安全隐患,在现场观测中正逐渐被新技术所取代。
以SILAS系统为代表的耦合观测系统代表了今后浮泥现场观测的发展趋势,该方法可以通过走航式测量获取测线剖面实时浮泥层分布情况,数据直观、可靠并且连续,通过音叉获取密度数据的标定进而分析剖面的密度分布,可以为研究浮泥分布、确定适航水深等问题提供准确的依据。
[1] Mcanally W H,Friedrich C,Hamilton D,et al.Management of fluid mud in estuaries,bays,and lakes.I:present state of understanding on character and behavior [J].Journal of Hydraulic Engineering,2007,133(1):9-22.
[2] 钱宁,万兆惠.泥沙运动力学[M].北京:科学出版社,1983.Qian Ning,Wan Zhaohui.Mechanics of Sediment Transport [M].Beijing:Science Press,1983.
[3] Inglis C C,Allen H H.The regimen of the Thames Estuary as affected by currents, salinities and river flows[J].Proceedings of the Intuition of Civil Engineers,1957,7(4):827-879.
[4] Committee on Tidal Hydraulics.Estuarine navigation projects,technical bulletin 17[R].Vicksburg,Miss:Crops of Engineers Committee on Tidal Hydraulics,1971.
[5] Parker W R,Kirby R.Time dependent properties of cohesive sediment relevant to sedimentation management-A European experience [C].New York: Academic Press,1982.
[6] Corselli C,Basso D.First evidence of benthic communities based on chemosynthesis on the Napoli mud volcano (Eastern Mediterranean) [J].Marine Geology,1996,132(1/2/3/4):227-239.
[7] Montserrat F,Suykerbuyk W,Al-Busaidi R,et al.Effects of mud sedimentation on lugworm ecosystem engineering [J].Journal of Sea Research,2011,65(1):170-181.
[8] 牛桂芝,裴文斌.三爪砣测量适航水深技术分析与对策[J].水道港口,2006,27(4):265-268.Niu Guizhi,Pei Wenbin.Analysis of surveying nautical depth by three wings lead [J].Journal of Waterway and Harbor,2006,27 (4):265-268.
[9] JTJ 203—94 水运工程测量规范[S].北京:人民交通出版社,1994.JTJ 203—94 Specifications for Port and Waterway Engineering Survey [S].Beijing:China Communications Press,1994.
[10] 牛桂芝,沈小明,裴文斌.SILAS适航水深测量系统测试研究[J].海洋测绘,2003(5):24-27.Niu Guizhi,Shen Xiaoming,Pei Wenbin.The test of SILAS sounding system [J].Hydrographic Surveying and Charting,2003(5):24-27.
[11] 沈小明,裴文斌.适航水深测量技术介绍与探讨[J].水道港口,2003,24(2):94-96.Shen Xiaoming,Pei Wenbin.Discussion on measuring technique of navigable depth [J].Journal of Waterway and Harbour,2003,24(2):94-96.
[12] 易瑞吉,丁元国,程和森.γ射线技术在河口航道地区浮泥观测中的应用[J].同位素,2007(2):90-93.Yi Ruiji,Ding Yuanguo,Cheng Hesen.Application ofγRay to field investigation of float mud in ocean outfalls and navigation channels [J].Journal of Isotopes,2007(2):90-93.
[13] 程和森,丁元国,王顺中,等.用γ射线方法观测瓯江口航道治理一期工程后乐清湾港区浮泥容重及分布[R].南京:南京水利
科学研究院,2005. Chen Hesen,Ding Yuanguo,Wang Shunzhong,et al.Observation of the Fluid Mud Bulk Density and Distribution Usingγray Method in Yueqing Bay after the First Phase of the Regulation Project of Oujiang River Channel [R].Nanjing:Nanjing Hydraulic Research Institute,2005.
[14] 李樟苏,吴永进.γ密度仪测定杭州湾浮泥和淤泥重度简介[J],水运工程,1995(5):17-20.Li Zhangsu,Wu Yongjin.Introduction of determination of fluid mud bulk density in Hangzhou Bay usingγray densimeter [J].Port & Waterway Engineering,1995(5):17-20.
[15] 李樟苏,曹更新,程和森,等.同位素技术在水利工程中的应用[M].北京:水利电力出版社,1990:174-175.Li Zhangsu,Cao Gengxin,Chen Hesen,et al.Application of Isotope in Hydraulic Projects [M].Beijing:China Waterpower Press,1990:174-175.
[16] 吴永进.智能γ-射线数字测沙仪的研制及其应用[J].水利水运科学研究,1986(4):83-92.Wu Yongjin.Developing and application of digitalizedγray sand meter [J].Hydro-Science and Engineering,1986(4):83-92.
[17] 张平波,郑昌武.差压式海底浮泥层密度测量[J].上海水利,1997(2):17-22.Zhang Pingbo,Zheng Changwu.Differential pressure type seabed mud layer density measurement [J].Shanghai Water,1997(2):17-22.
[18] 吕美新,吕锵.国产回声测深仪性能分析与选用[J].气象水文海洋仪器,2005(2):56-60.Lv Meixin,Lv Qiang.Property analysis and selection of homemade echo detector [J].Meteorological Hydrological and Marine Instrument,2005(2):56-60.
[19] 陈钧,万军,施卫星.双频测深仪测深研究[J].海洋测绘,2008,28(6):70-73,78.Chen Jun,Wan Jun,Shi Weixing.Bathymetric study on the dual frequency echo sounder [J].Hydrographic Surveying and Charting,2008,28(6):70-73,78.
[20] 陈学良.连云港浮泥测试及“适航深度”的确定[J].水运工程,1998(8):29-32.Chen Xueliang.Fluid mud examination and navigable depth determination for Lianyungang Port [J].Port & Waterway Engineering,1998(8):29-32.
[21] 奚民伟.浮泥层测量及其应用[J].海洋测绘,2011(3):55-57.Xi Minwei.Measurement and application of fluid mud [J].Hydrographic Surveying and Charting,2011(3):55-57.
[22] 钱炳兴,凌鸿烈,孙跃秋,等.超声波浮泥重度测量仪[J].声学技术,2001,20(1):42-44.Qian Bingxing,Ling Honglie,Sun Yueqiu,et al.An ultrasonic fluid mud bulk density meter [J].Technical Acoustics,2001,20(1):42-44.
[23] Caine S.AQUAscat 1000 User Manual [M].Hartley Whitney,UK:Aquatec Group Ltd.,2006.
[24] 张叔英,李允武.声学悬浮泥沙观测系统的研制和应用[J].海洋学报,1998,20(5):114-119.Zhang Shuying,Li Yunwu.Development and application of an acoustic suspended sediment monitoring system [J].Acta Oceanologica Sinica,1998,20(5):114-119.
[25] 郑乔雄,李纪元,章泳明.水深测量的全新技术-适航水深测量[J].海洋测绘,1997(3):35-41.Zheng Qiaoxiong,Li Jiyuan,Zhang Yongming.New technology of depth measurement-survey of navigable depth [J].Hydrographic Surveying and Charting,1997(3):35-41.
[26] 王照田.浮泥观测在港珠澳大桥试挖槽中的应用[J].人民珠江,2010(5):7-9.Wang Zhaotian.Application of fluid mud observation in Hong Kong-Zhuhai-Macao Bridge trial trench [J].Pearl River,2010(5):7-9.
[27] 贾更华,袁洪洲.荷兰SILAS走航式适航水深测量系统在太湖底泥测量中的应用与实践[J].水利科技与经济,2005,11(9):521-523.Jia Genghua,Yuan Hongzhou.Application and practice of Holand SILAS subbottom sediment characterization system in Taihu lake sediment measurement [J].Water Conservancy Science and Technology and Economy,2005,11(9):521-523.
[28] 许宝华,王真祥.象山港进港航道外干门浅段试挖槽浮泥观测研究[J].人民长江,2009,40(22):68-68.Xu Baohua,Wang Zhenxiang.Observation and research on fluid mud in main entrance channel of Xiangshan Port trial excavation section [J].Yangtze River,2009,40(22):68-68.
[29] 郭海峰.SILAS走航式适航水深测量系统在太湖底泥测量中的应用[J].浙江水利科技,2010(5):48-51,60.Guo Haifeng.Application and practice of SILAS sediment sounding System in Taihu lake sediment measurement [J].Zhejiang Hydrotechnics,2010 (5):48-51, 60.
[30] 夏维.适航水深测量与SILAS系统应用[J].珠江水运,2009(6):50-51.Xia Wei.Navigable depth measurement and the application of SILAS system [J].Pearl River Water Transport,2009(6):50-51.
猜你喜欢
科教导刊·电子版(2022年36期)2022-02-18
中学生数理化·八年级物理人教版(2021年5期)2021-11-22
小学生优秀作文(高年级)(2020年3期)2020-11-26
家庭影院技术(2020年6期)2020-07-27
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
船海工程(2015年4期)2016-01-05
物理教师(2015年1期)2015-01-08
