
一种改进航空发动机控制器性能的非线性设计方法
2014-02-27 08:57商国军王继强胡欢赵明宇彭利方胡忠志
燃气涡轮试验与研究 2014年3期
商国军,王继强,胡欢,赵明宇,彭利方,胡忠志
(南京航空航天大学能源与动力学院,江苏南京210016)
一种改进航空发动机控制器性能的非线性设计方法
商国军,王继强,胡欢,赵明宇,彭利方,胡忠志
(南京航空航天大学能源与动力学院,江苏南京210016)
为提高航空发动机某工作点的模型精度,并拓宽航空发动机在该工作点控制包线的范围,可应用非线性模型来描述该工作点的动态过程。基于该非线性模型,首先应用Lyapunov稳定性定理设计出一组控制器,然后应用广义Gronwall-Bellman引理的方法完成该控制器性能验证。仿真研究表明:系统响应速度快,能有效抑制干扰,具有良好的跟踪性和鲁棒性,验证了该设计方法的有效性。
航空发动机;控制器;非线性模型;非线性控制;Lyapunov理论;广义Gronwall-Bellman引理
1 引言
航空发动机是一个复杂的热动系统,其本质是一个强非线性对象,在飞行包线内参数变化范围大,所以用基于线性模型设计的控制规律不能很好地满足系统变工况运行的需要[1],只能由非线性过程模型来描述,这就需要用非线性控制技术来进行控制系统的设计研究。
目前,已被广泛采用的非线性控制方法有神经网络逆控制[2]、非线性自适应控制[3]、非线性预测控制[4]等。上述方法的应用,可使系统有效抑制干扰、快速跟踪并具有很强的鲁棒性能。但通常采用的非线性控制设计方法虽然可保证系统的稳定性,但并不能事先预知其控制性能,只能通过设计后验证。
因此,本文将采用两种非线性设计技术相结合的方式,进行航空发动机非线性控制设计研究。该方法主要是为了有效改进航空发动机控制系统的性能,即首先在保证系统稳定的前提下,用Lyapunov理论设计出控制器,使所设计的控制器可被限定在一定范围内选取,极大地减小了控制器选取的盲目性;然后对在该范围内任选的一组控制参数,通过应用广义Gronwall-Bellman引理的方法对系统变量的收敛速度进行预先分析,并验证所选控制器的优劣性。
2 航空发动机非线性控制设计方法
2.1 Lyapunov理论
Lyapunov理论[5~7]可分为间接法和直接法,本文采用直接法来研究航空发动机控制系统的稳定性问题。其思路是根据一个Lyapunov函数变化情况来对系统稳定性做出判断,判断方法可依据Lyapunov稳定性定理。
定理1如果在一个球BR0内,存在一个标量函数V(x),它具有一阶连续偏导数,并且
(1)V(x)正定(在球BR0内);
2.2 广义Gronwall-Bellman引理
广义Gronwall-Bellman引理[8,9]的内容为:
如果有不等式

成立,则∀t∈[a,b]有

式中:a、b、k∈R,其中0≤a<b,k>0;整数l>1。由上述不等式可知,在适当条件下,能对x(t)的边界特性进行调节。
3 航空发动机非线性控制理论研究
航空发动机的非线性模型[10,11]可表示为:

式中:x为系统状态量,u为控制输入量,y为系统输出量。在某一确定的稳态点,通过泰勒级数展开,状态空间模型的表达式为:

本文选用的模型是将燃油流量比Wf及喷口面积A8作为控制量,将压气机及风扇转速n2、n1作为状态量,则状态方程可表示为:

方程中的参数可通过偏导数法[12]或拟合法[13,14]求得。
显然,上述模型只在稳态工作点有效。因此,为得到更大包线内的控制模型,其中一种方法是为模型添加非线性项来修正线性模型。如:

式中:G(·)为一般的非线性项,静态反馈控制



将式(6)、式(7)代入式(9)得:

使定理1成立的条件将在下一节讨论。下面应用广义Gronwall-Bellman引理方法研究航空发动机非线性控制设计。
假设:非线性状态方程(6)满足条件:
(1)矩阵(A,B)是稳定的;
(2)存在一个整数q≥1,使

其中γ为正常数,可以此来调节系统指数性能。在此基础上,要使被控制系统指数稳定,需满足:矩阵(A+BK)所有的特征根具有严格的负实部且初始状态

这里常数M>0,λ<0且


文献[9]中对式(14)给出了详细的证明过程。说明:‖x(t)‖可由标量常数M、λ、γ和q来调节,γ和q由非线性项G(x)估算出,而静态增益K的选择将决定M和λ的值。
4 航空发动机非线性控制数值研究
4.1 基于Lyapunov理论的研究
采用文献[15]中某型涡扇发动机的线性模型,该模型以高空(H=5.0 km,Ma=1.0)某工作点通过拟合法求得。在此模型基础上加入非线性项可表示为:

定理2控制器参数K值在以某椭圆为边界线的内部选取,可保证控制系统稳定。
证明:由定理1可知,系统状态x(t)在约束条件下渐进稳定的条件是:①V(x)>0;②。将矩阵P代入式(8)有V(x)=xΤPx=x12+x22>0,条件①成立。下面研究使条件②成立的条件。
由于式(15)已做归一化处理,故x1、x2表示高低压转子转速变化百分比,则-1≤x1≤1,-1≤x2≤1。将式(16)及式(15)状态方程的系数矩阵代入式(10)并配方得:


由式(18)可画图1所示图形。显然,由式(18)可知,k1、k2、k3、k4所有可能值均在椭圆内部选取,即在图1的左边椭圆中选取k1、k3,在右边椭圆中选取k2、k4。因此,在椭圆内部选取控制器参数可保证系统稳定,得证。

图1 控制器参数的选择范围Fig.1 Range of feasible controller parameter
矩阵K的选取原则是应尽量使‖K‖最小,即椭圆中距离原点最近的点。因为‖K‖越小,可使系统输入量u越小,系统不容易饱和。据此,选择图1中左图原点(0,0)及右图点(-0.5,0)并将其带入式(18),可使不等式恒成立,验证了K值选取的正确性。即。由于K的选取具有一定的自由度,当选择该组控制器后,无法立即知道其闭环控制系统的性能。因此,本文将在下文中应用广义Gronwall-Bellman引理方法对系统收敛速度进行分析,以进一步讨论该控制器的性能优劣。
4.2 基于广义Gronwall-Bellman引理的研究
4.2.1 调节器性能
根据式(11)及式(16),可取γ=2和q=2;开环状态方程的特征根为λ1=-2.994+1.1726i,λ2=-2.994-1.1726i,,则闭环状态方程的特征根为λ1=-3.485 2+0.867 4i,λ2=-3.485 2-0.867 4i。根据式(13),可取M=1,λ=-3.4,初始状态的范围由式(12)得‖x0‖<1.7。
在初始状态为x0=[-0.8-1.2]T(则‖x0‖=1.4422<1.7)时对系统进行仿真,x(t)的瞬态性能如图2所示,图中也绘出了开环控制系统状态方程的瞬态响应。可见,系统在闭环状态反馈的作用下,调节时间短,响应快,能有效抑制干扰,控制系统性能得到明显改善。

图2 状态信号瞬态响应比较Fig.2 Comparison of state signals transient response

图3 带理论边界的‖x(t)‖的瞬态响应比较Fig.3 Comparison of transient response for‖x(t)‖with theoretical bound

图4 输出信号的调节性能比较Fig.4 Comparison of regulation performance of output signals
4.2.2 跟踪性和鲁棒性
在一定飞行高度和速度下,同时给Wf及A8值为0.1的阶跃信号,即系统输入量从零增加到10%,系统输出变量的性能如图5所示。为便于比较,图中也绘出相应线性系统的响应曲线。具体讨论如下:
(1)首先比较非线性系统的开环和闭环控制,可明显看出系统具有良好的跟踪性;其次考虑线性系统的开环和闭环控制,在相同状态反馈控制下,系统仍具有较好的瞬态响应性能,也表明系统具有良好的跟踪性。
(2)通过非线性系统与线性系统的比较可注意到,原线性系统所引入的非线性项可作为对线性系统的一种干扰,但其并不影响系统性能,表明系统具有较好的鲁棒性。
(3)真实系统的动态响应由非线性系统来表示,尽管非线性项的引入增加了变量ΔP36在初始时刻的振荡,但状态反馈控制减小了振荡幅值,且增加了系统的响应速度。闭环非线性系统与闭环线性系统的性能比较表明,系统性能损失有限度。这说明所提出的设计方法可适应对象大范围变化,这也正是控制系统所期望的特性。
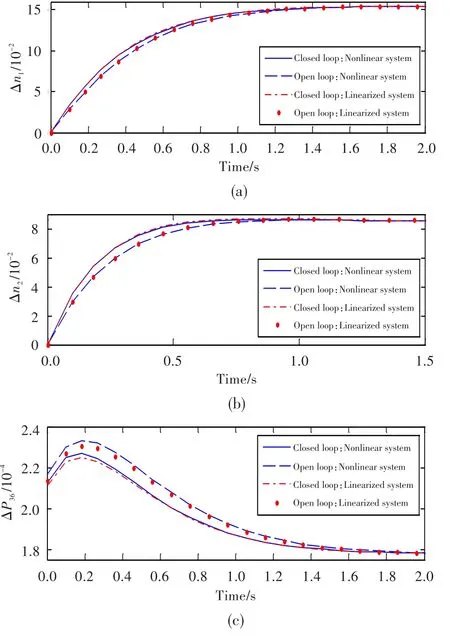
图5 跟踪性能比较Fig.5 Tracking performance of the proposed design
5 结论
本文应用两种非线性方法相结合的方式,对航空发动机控制系统进行了设计研究。即首先应用Lyapunov理论,在保证系统稳定的前提下,设计出系统的控制器;然后应用广义Gronwall-Bellman引理对系统的收敛速度进行分析,以进一步验证所选控制器的性能。研究结果表明:系统响应速度快,并具有较好的跟踪性及鲁棒性,不但获得了期望的性能,而且该方法可适应对象在控制包线内大范围变化,可有效改进航空发动机非线性控制系统的性能。
[1]张海波,孙健国,孙丰诚.非线性反演控制律在航空发动机多变量控制中的应用[J].航空动力学报,2007,22 (7):1190—1194.
[2]姚彦龙,孙健国.基于神经网络逆控制的发动机直接推力控制[J].推进技术,2008,29(2):249—252.
[3]张怀宙,秦化淑.不确定仿射非线性系统的自适应控制-GRBF网络学习方法[J].控制理论与应用,1999,16 (1):11—15.
[4]Brunell B J,Bitmead R R,Connolly A J.Nonlinear Model Predictive Control of an Aircraft Gas Turbine Engine[C]//. Proceedings of the 41st IEEE Conference on Decision and Control Las Vegas.Nevada USA:2002.
[5]贺昱曜,闫茂德.非线性控制理论及应用[M].西安:西安电子科技大学出版社,2007.
[6]Slotine J J,Li Wei-ping.应用非线性控制[M].北京:机械工业出版社,2006.
[7]Kokotovic P,Arcak M.Constructive Nonlinear Control:A Historical Perspective[J].Automatica,2001(37):637—662.
[8]Pachpatte B.A Note on Gronwall-Bellman Inequality[J]. Journal of Mathematical Analysis and Applications,1973,(44):758—762.
[9]Wang Ji-qiang,Ye Zhi-feng,Hu Zhong-zhi.Nonlinear Control of Aircraft Engines Using a Generalized Gron⁃wall-Bellman Lemma Approach[J].Journal of Engineering for Gas Turbine and Power,2012,134(9):1—6.
[10]樊思齐,李华聪,樊丁,等.航空发动机控制:下册[M].西安:西北工业大学出版社,2008.
[11]赵连春,杰克·马丁利,张新国.飞机发动机控制—设计、系统分析和健康监视[M].北京:航空工业出版社,2011.
[12]Sugiyama N.Derivation of ABCD System Matrices from Nonlinear Dynamic Simulation of Jet Engines[R].AIAA 92-3319,1992.
[13]冯正平,孙健国.航空发动机小偏差状态变量模型的建立方法[J].推进技术,2001,22(1):54—57.
[14]胡宇,杨月诚,张世英,等.基于改进拟合法的涡扇发动机状态变量模型建立方法[J].推进技术,2013,34(3):405—410.
[15]冯正平,孙健国,黄金泉,等.一种建立航空发动机状态变量模型的新方法[J].航空动力学报,1998,13(4):435—438.
Nonlinear Design Method for Improving Aero-Engine Control Performance
SHANG Guo-jun,WANG Ji-qiang,HU Huan,ZHAO Ming-yu,PENG Li-fang,HU Zhong-zhi
(College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
In order to improve the model accuracy of the aero-engine in an operating point and extend the control envelope around the operating point,one strategy can be sought to apply nonlinear model to describe the dynamic characteristics.Firstly,a nonlinear controller can be obtained for the aero-engine using Lyapu⁃nov stability theorem.Then Generalized Gronwall-Bellman lemma is used to validate the controller perfor⁃mance.Finally,the simulation study shows that the proposed design can provide fast transient response, good tracking performance and robustness,and reject the disturbance effectively to validate the effective⁃ness of the control design approach.
aero-engine;controller;nonlinear model;nonlinear control;Lyapunov theory;generalized Gronwall-Bellman lemma
V223.7
:A
:1672-2620(2014)03-0039-05
2013-09-04;
:2013-12-12
南京航空航天大学青年科技创新基金(NS2013020)
商国军(1988-),男,内蒙古赤峰人,硕士研究生,研究领域为航空发动机控制与仿真。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
辽宁师范大学学报(自然科学版)(2021年4期)2022-01-10
南宁师范大学学报(自然科学版)(2021年2期)2021-07-29
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
电子制作(2019年13期)2020-01-14
中国中医急症(2019年10期)2019-05-21
数学学习与研究(2018年12期)2018-08-17
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年16期)2016-06-29
