
基于模糊控制船闸闸门同步的设计
2014-01-25 07:52:18张建平刘增元李丹锋
制造业自动化 2014年12期
张建平,刘增元,李丹锋
(北京机械工业自动化研究所,北京 100120)
0 引言
船闸系统中,闸门是由左右两扇门组成的,选择其中一扇作为主侧,另一扇为从侧。闸门运动时,主侧闸门根据设计要求以设定速度运动,从侧闸门也是相同的设定。但由于自身性能的差异,左右两扇门运行起来会有会有同步偏差,该偏差可以通过左右两侧门的开度仪(位置传感器)计算得出,当偏差超过设定值时,从侧闸门加速或者减速,以此保证左右两扇门的位置同步。
存在的问题是,不同项目中船闸闸门及液压启闭机(推动闸门)的设计往往也是不同的,所以采用固定参数的传统控制器来实现同步是不现实的,实际中,经常是由程序员凭个人经验先预设参数,然后根据闸门同步效果不断修正,这样导致现场调试时间长,而且很大程度上是依赖于个人理论素养和经验的。
模糊控制则不然,它的规则是依赖于人类经验的,可以通过被控制量误差的变化及变化率不断修正输出值的控制器。这样如果拥有一个好的的模糊控制器,即使是一个经验不怎么丰富的技术员,也可以很好的在不同系统中实现控制。
1 闸门同步控制器的设计
1.1 系统结构原理
模糊控制是以人的控制经验为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的数学工具,用计算机来实现的一种智能控制。模糊控制系统性能的优劣,主要取决于模糊控制器与人的控制经验的符合程度。
闸门同步控制结构如图1所示,以双闭环控制,外环为位移环,内环为速度环,其中闸门的位移是通过开度仪直接检测得到的,闸门速度是通过液压的比例泵间接控制,比例泵的流量与闸门的速度成比例关系,在图中以K表示,比例阀自带闭环反馈,可以准确依照指令达到指定的比例阀开度,反馈环节在图中以v’的反馈表示。
运行时,PLC不断检测左右两扇闸门的位移,同时计算出位移的差值,当位移的差值超过控制的精度要求时,启动同步纠偏:首先在采样周期内,算出位移差和位移差的变化率,通过三角隶属函数,将位移差和位移差的变化率映射到模糊论域;然后根据人为制定的IF-THEN规则,通过输入属于的模糊论域,找到对应的输出的模糊论域;最后根据输出的模糊论域采用重心法反模糊化得到速度要纠偏的量v2。

图1 闸门同步控制结构原理图
1.2 模糊控制器的原理及结构设计
模糊控制器内部结构如图2所示,模糊控制器包括输入量模糊化、模糊推理和解模糊3个部分。左侧为模糊控制器的两个输入端,右侧为模糊控制器的输出端,e为两门行程的差值,ec为e的一阶导数,采样周期设定为1s。E和EC分别是e和ec模糊化后的模糊量;U为模糊控制量,u为U解模糊化后的精确量。K1、K2和K3是量化因子,作用是将输入的工程量转化到相应的模糊论域[-2,2]。根据控制精度要求,将E、EC和U划分成五个档{-2,-1,0,+1,+2},每个档中采用三角型隶属度函数,从大到小为PB、PS、Z、NS和NB。
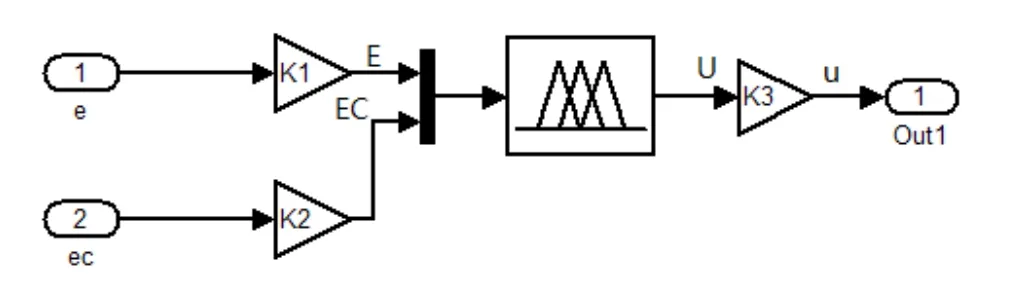
图2 模糊控制器基本结构
模糊推理是模糊控制器的核心部分,采用模糊IF- THEN规则库便于PLC编程实现,同时规则库的建立是基于成熟的控制经验上建立的。建立的规则表如表1所示,其中左下边竖列的是EC的论域,右上横排的是E的论域。
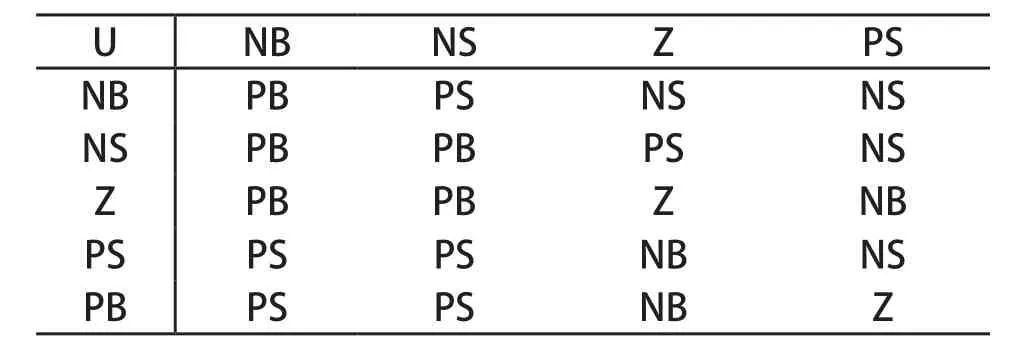
表1 规则库
实际工作中,为了保证E、EC和u的量程为定值,需要尺度转换,如设:e的范围为[m,n],E的范围为[x,y],则K1的值为(y-x)/ (n-m),转换时,E=e*K1。计算原理为,设E属于NB的隶属度为a,属于NS的隶属度为b,EC属于NB的隶属度为c,属于NS的隶属度为d。则根据规则库匹对可得,U属于PB的隶属度为a*c+a*d+b*d,属于PS的隶属度为b*c。得到U的论域和隶属度后,采用重心法去模糊化得到控制变量u。方法为:U为隶属度α的PB,和隶属度β的PS,则去模糊化有α’=α/(α+β),β’=α/(α+β),u=α’*PB’+β’*PS’,其中PB’和PS’分别为PB和PS的中心值。
2 模糊控制闸门同步的PLC实现
模糊控制器IF-THEN的推理方式便于PLC用梯形图实现。与传统IF-THEN相比,特殊之处在于在模糊接口的处理,判断之前需要将左右闸门的行程差模糊化处理,在得到所需的量后需要将被控变量反模糊化处理。
实现时,首先PLC在每个采样周期点计算对e和ec,并对计算出的e进行上下限判断,如果e超过上下预警限时就启动模糊控制,对e和ec转化成对应的E和EC,再用E和EC的所属的阈值与规则库去匹对,按照IF-THEN的规则库找到对应的U后,将U反模糊化就得到所需的控制量。
举例来说:如e的工程范围为[-30,30],ec工程的范围为[-5,5],某一次计算得到e为8,ec为3,e的警戒值为±5,e已经超过警戒值启动纠偏程序。则首先对e和ec进行归一化和模糊化:,E隶属于Z的程度为0.47,属于PS的程度为0.53,EC隶属于PS的程度为0.8,隶属于PB的程度为0.2。然后进行模糊化推理:根据表一的规则对应出U,0.47*0.8的NB,0.47*0.2的NB,0.53*0.8的NS和0.53*0.2的Z。然后对U反模糊化处理,即0.47*(-2)+0.53*0.8*(-1)=-1.356。如果调速范围为[-500,500]则对应的调节量为。如此得到所需的控制量,应该给右侧比例泵减小0.339的开度。程序实现时,可以用PLC中的ST指令来判断,部分实现方法如图3所示。其中图3(a)启动纠偏程序后,根据e的大小进入相应的模糊域(D1和D2)及其隶属度(A1和A2),对ec也进行类似的处理;图3(b)中根据E和EC属于的模糊域进行规则匹对得出U的模糊域隶属度(U1)。编程过程中由于规则配对数比较多可以采用调用子程序的方式实现。
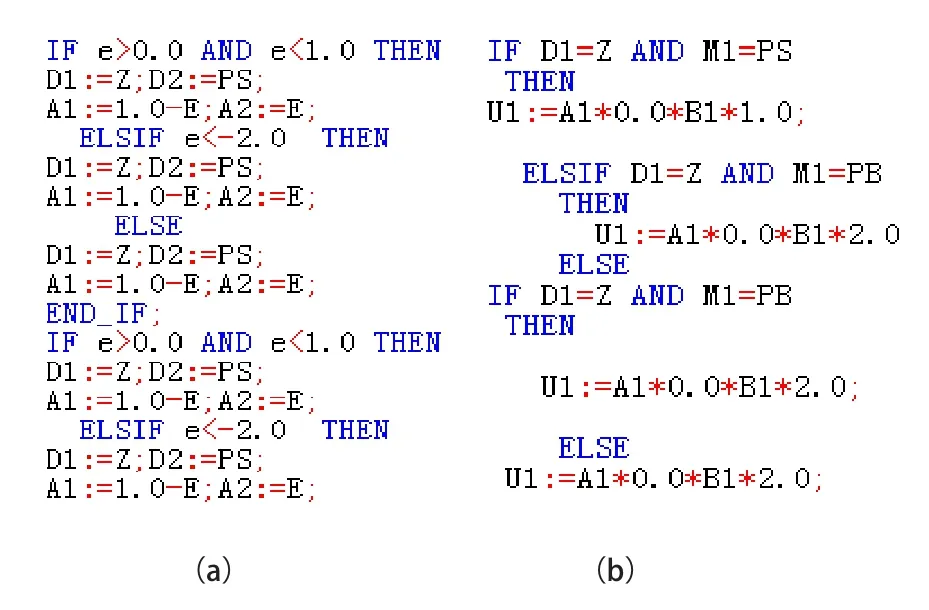
图3 模糊化及规则匹对
3 结束语
模糊控制属于模糊数学和自动化领域的交集,整体框架是按自动化要求来的,如控制对象的分析,系统设计,模糊数学在其中的地位是指导相关参数随着被控变量变化而变化,而且这种变化是基于人类经验的。在这里,模糊控制器是不断对闸门同步差进行采样和计算,根据人类的经验(规则库)指导参数变化。所以模糊控制闸门同步的性能取很大程度决于规则表的设定,而规则表是依赖于人去设定的,所以在控制器实现初期需要有经验丰富的人士,在设计初期可以先将输入变量的模糊论域划分粗略一下,如果效果良好可以不断细分论域和规则这样得到的控制变量就不断精确。
设计好后的控制器,今后使用到其他闸门同步项目中,一般情况下只要将工程量和模糊量的尺度变化值更改一下,不用更改规则库就能达到很好的效果,大大体现了智能控制的优越性。
[1]张曾科.模糊数学在自动化中的应用[M].北京:清华大学出版社,1997.
[2]王立新.模糊系统与模糊控制[M].北京:清华大学出版社,2003
[3]殷云华,等.基于Matlab的模糊控制器设计及仿真[J].控制工程,2007,14(5):488-490.
[4]瞿枫.基于西门子S7-300 PLC的模糊控制实现[J].南京师范大学学报,2007,7(4):23-27.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
测控技术(2018年10期)2018-11-25 09:35:52
西南交通大学学报(2016年3期)2016-06-15 20:29:35
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年2期)2016-02-27 09:04:56
