基于变精度粗糙集的汽车碰撞危险态势评估
2013-08-02 03:59彭理群吴超仲
交通运输系统工程与信息 2013年5期
彭理群,吴超仲*,黄 珍
(1.武汉理工大学智能运输系统研究中心,武汉430063;2.水路公路交通安全控制与装备教育部工程研究中心,武汉430063;3.武汉理工大学自动化学院,武汉430070)
基于变精度粗糙集的汽车碰撞危险态势评估
彭理群1,2,吴超仲*1,2,黄 珍3
(1.武汉理工大学智能运输系统研究中心,武汉430063;2.水路公路交通安全控制与装备教育部工程研究中心,武汉430063;3.武汉理工大学自动化学院,武汉430070)
汽车碰撞危险辨识与预警是智能防撞系统的关键技术之一,为了解决现有的防撞系统在复杂交通环境下虚警率较高、灵活性差的问题,本文对“人—车—路”多因素影响下的汽车碰撞危险辨识方法进行了研究.综合考虑驾驶员、车间距、路面等因素对行车安全性的影响,并基于车路协同平台获取相关信息,应用态势评估理论建立汽车碰撞危险评估模型.在该模型的基础上,结合变精度粗糙集理论形成汽车碰撞危险态势评估规则.应用属性加权相似度方法比较当前行车状态与决策信息表中所有行车状态的相似程度,得到碰撞危险态势的评估结果.模拟驾驶实验结果表明,该方法能融合行车安全相关的多种因素来检测碰撞风险,为汽车防撞系统提供准确的决策.
智能交通;态势评估;变精度粗糙集;汽车防撞系统;人-车-路多因素;车路协同
1 引 言
随着道路交通环境的日益复杂,传统的汽车防撞预警系统突显出虚警率和误警率较高的缺点.低效的防撞预警系统会干扰驾驶员的正常驾驶,影响行车安全性,降低道路通行能力.目前,汽车碰撞危险辨识方法的研究主要基于车间安全距离和车间安全时距[1],忽略了驾驶员状态、车况和道路交通环境对行车安全性的影响,从而使系统不能适应复杂多变的道路交通环境[2].因此,先进的汽车防撞系统对行车安全状态辨识方法的准确性、实时性和适应性提出了更高的要求.
传统的汽车防撞系统主要基于单一因素判断行车安全状态,如车间距、车道偏离等[3].近年来,代表先进智能交通系统的车路协同技术将“人—车—路”作为一个整体,实现了车车、车路动态实时信息交互,并基于交通信息采集与融合对汽车周围环境信息进行全面分析,结合车辆行驶状态、驾驶员状态来辨识汽车潜在的碰撞风险[2-4],更加准确地判断行车安全状态,充分实现人车路的有效协同,保证交通安全,提高通行效率.针对多源信息下的态势评估问题,军事与网络安全领域的学者提出了许多方法,如贝叶斯网络、模糊推理、D-S证据理论、灰色系统[5]等,但这些方法推理过程复杂且计算量大,而车载设备解算能力差,对实时性影响较大.因此,上述方法并不适用于行车安全态势评估.
本文基于车路协同信息采集平台,建立了汽车碰撞危险态势评估模型,运用变精度粗糙集理论研究态势评估的方法,构建了碰撞风险的评估规则和知识表达方法,通过属性加权相似度对比检测出汽车碰撞危险,为汽车防撞系统提供更加准确的判断.
2 汽车碰撞危险态势评估模型
态势评估理论与方法被应用于不同领域来处理多种因素下的决策问题.近年来,信息融合和态势评估理论被引入到智能交通领域,用于解决复杂环境下的行车安全性辨识问题.
2.1 模型建立
Polychronopoulos等将JDL模型引入汽车安全辅助驾驶领域,提出了行车安全态势感知的ProFusion2模型[6],Elizabeth综合“人—车—路”多信息构建了行车安全态势感知模型[2],但这些模型结构都不完整.本文在以上两个模型的基础上,结合NSSA模型[5]的思路,提出一个汽车碰撞危险态势评估模型,如图1所示,细箭头线表示组件之间的数据流向,粗箭头线表示层次之间的数据流向.
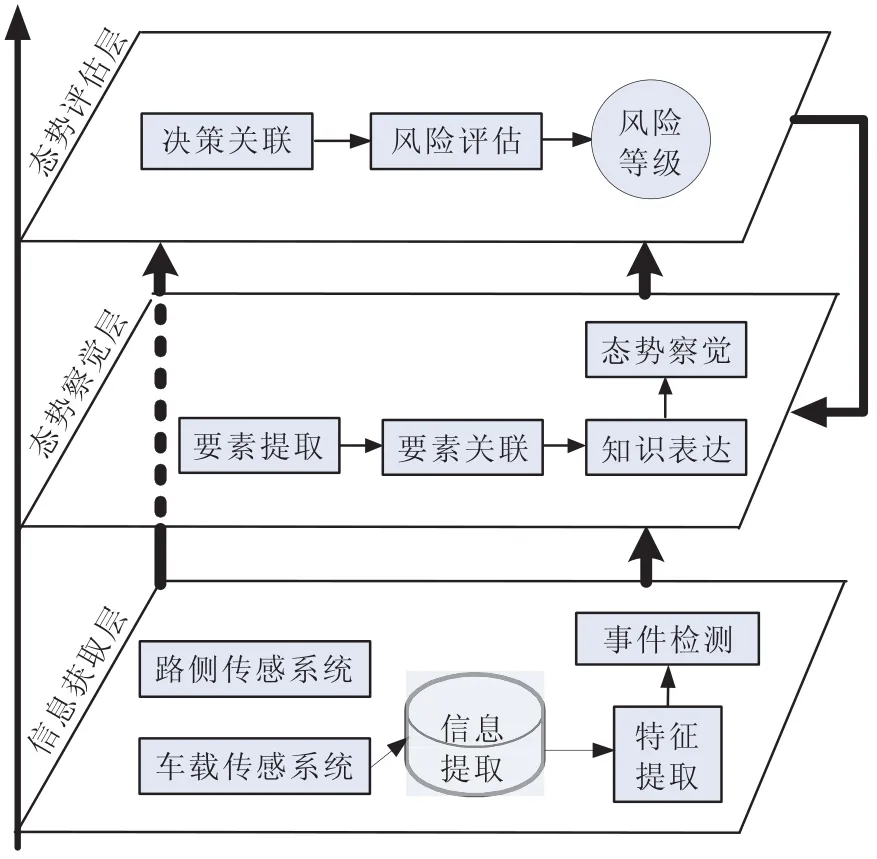
图1 汽车碰撞危险态势评估模型Fig.1 Vehicle collision risk situation assessment model
模型结构分为三层,至下而上依次为信息获取层、态势察觉层和态势评估层.
信息获取层是模型的底层,基于车路协同信息采集系统实现行车安全相关信息的获取、特征提取和事件检测.信息采集系统主要基于车载传感设备、路侧传感设备和车车通讯将获取的驾驶员信息(驾驶行为、意图等)、车辆运行状态(车速、车况等)和道路环境(天气、路面、障碍物等)送入信号采集与处理模块进行特征提取和事件检测.如图2所示.
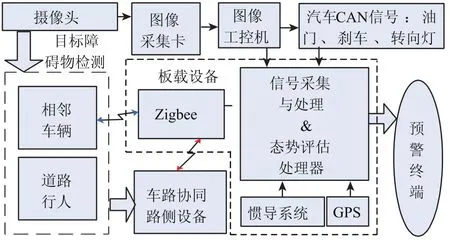
图2 汽车碰撞危险检测系统Fig.2 Vehicle collision risk detection system
态势察觉层是模型的中间层,该层的主要功能是进行态势要素的提取、关联和知识表达.提取信息获取层中对行车安全态势影响较大的因素,即与安全态势关联性最大的特征属性集,采用量化知识表达方法,将事件信息映射为态势要素的属性值,作为态势评估层的输入,为分析行车安全态势提供依据.
态势评估层是模型的顶层,该层的主要功能是分析各态势要素对汽车碰撞危险的影响程度,建立条件属性与决策属性之间的关联性,评估行车安全状态,检测汽车行驶过程中的危险,并给出危险的等级.通过设置指标分析评估系统的误差程度,并反馈给态势察觉层中相关组件,对参数进行调整和优化,从而不断改善系统性能.
2.2 态势要素设计
汽车碰撞事故原因主要涉及到驾驶员因素(驾驶行为、意图等)、车辆运行状态(车速、车况等)和道路交通环境(天气、路面、障碍物等)这三类因素[2],因此,选取汽车碰撞危险态势要素如图3所示.
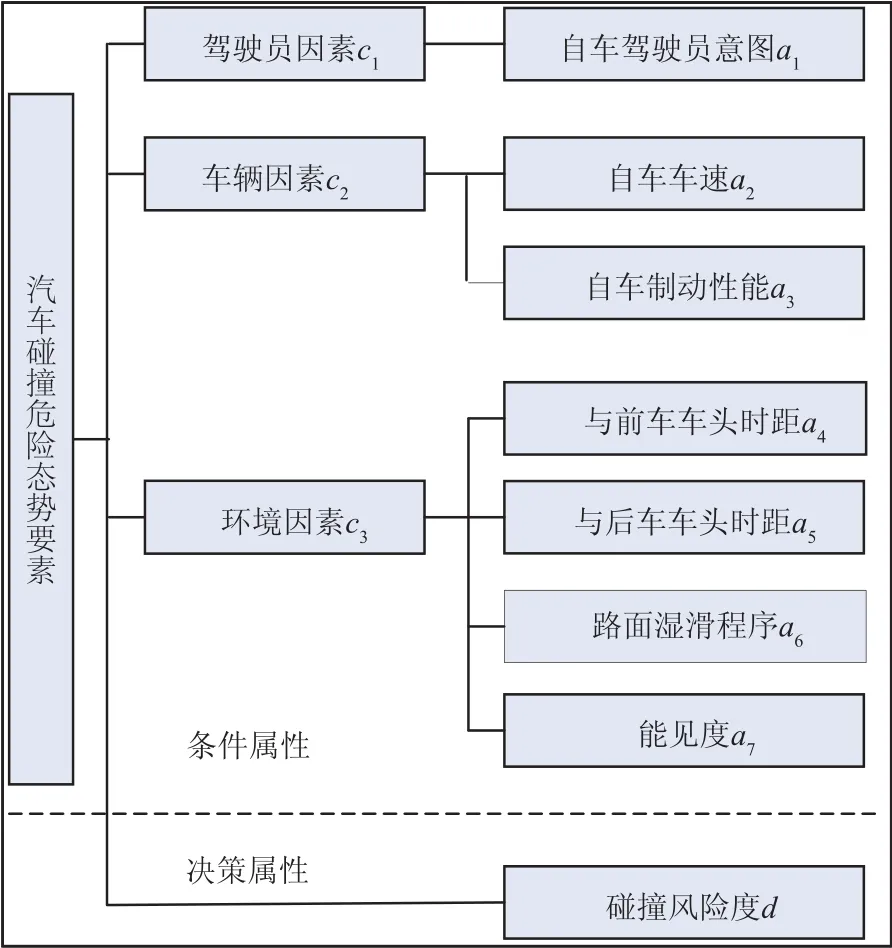
图3 汽车碰撞危险态势要素Fig.3 Factors of vehicle collision risk
对汽车碰撞危险态势要素的属性指标量化,如表1所示.
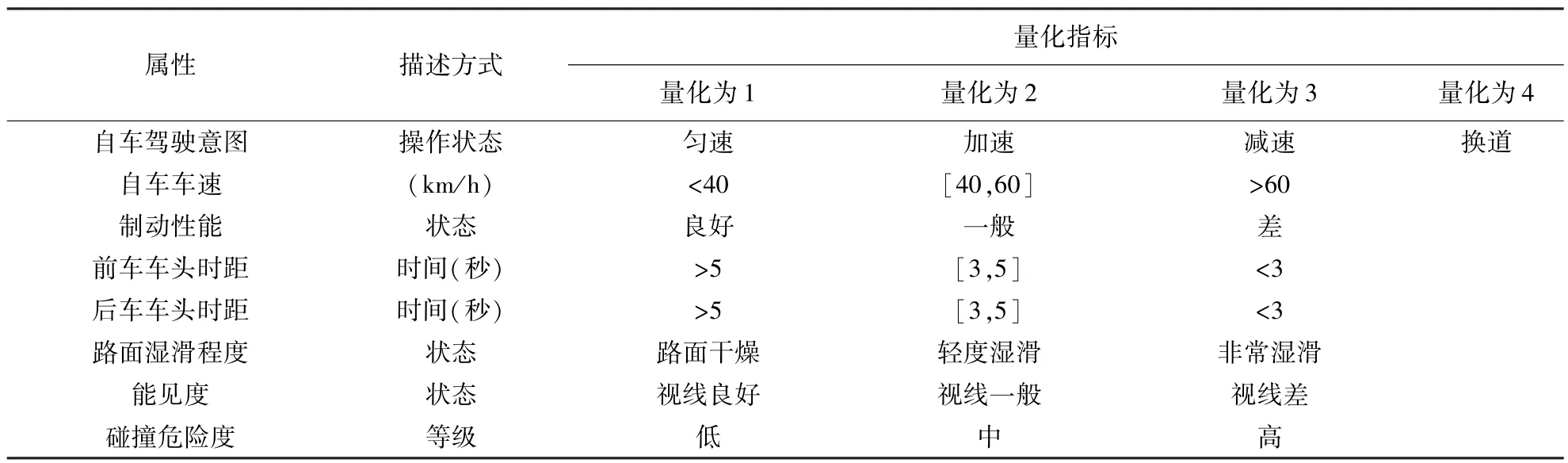
表1 属性指标量化Table 1 Attribute index quantitative
3 基于VPRS的汽车碰撞风险评估方法
3.1 态势要素的知识表达
综合考虑汽车碰撞事故的多元因素,构建这些因素相关的汽车碰撞危险粗糙集模型.设S={U, A,V,f}表示一个汽车碰撞风险知识系统.其中,U为论域空间,即研究对象中所有可能存在的道路交通场景及对应的危险程度;A为属性集合A=C∪D,C={a1,a2,a3,a4,a5,a6,a7}表示态势要素的条件属性集合,D={dj}表示决策属性集合;V=∪Va,其中a∈A,Va为属性ai的值域;f:U×A→V为信息函数,对于∀x∈U、∀ai∈A,f(x,ai)∈Va,它制定了U中每一个对象的属性值.
3.2 知识简约
Aijun在基本粗糙集模型的基础上引入了β(0.5<β≤1)作为正确分类率,提出了VPRS模型[7],胡杰等基于VPRS提出了无人机态势评估模型[8].为了增强粗糙集模型的抗干扰能力,本文在此基础上提出基于VPRS的汽车碰撞危险态势评估方法.
设R为U上的一个等价关系,X=R(x)为由R产生的等价类,X⊆U,U/X为由R产生的一个空间划分.U由条件属性集C和决策属性集D产生的划分分别表示为U/C={c1,c2,…,cm},U/D= {d1,d2,…,dn},|·|表示集合所有元素的个数.决策类的粗糙隶属度函数可以表示为

P(dj|R)表示R的等价类U/R对决策dj的分辨程度.对于P⊆C,给定阀值β,定义dj的β下逼近和上逼近分别为
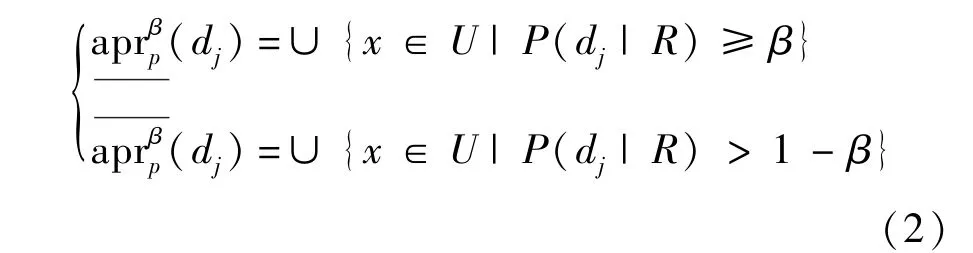
决策dj对条件知识P的依赖程度可以表示为
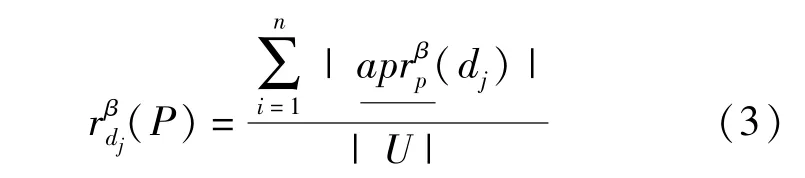
变精度粗糙集中的近似简约redβ(C,D)为β值下保证正确分类的最小条件属性集,其满足以下两个性质:
(1)γβ(C,D)=γβ(redβ(C,D),D);
(2)去掉redβ(C,D)中的任意一个属性都会使式(1)不成立.
3.3 可辨性阈值β值的确定
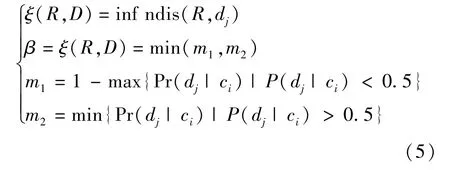
文献[8]提出β值的确定原则为:选定β值下的分类质量尽可能大,根据被选定的β值给出的约简属性集中的属性个数应尽可能少.对于每一个决策属性dj都存在一个阈值β,使得dj在这个阈值水平上可辨.令

ndis(R,dj)为满足dj不可分辨的β值的全体.满足dj的可分辨的阈值β的最大值称为可辨别的阈值,该阈值等于ndis(R,dj)的最小上界,即
3.4 条件属性的重要性权值计算
在简约决策表中,各个条件态势要素对风险的重要程度是不同的,当衡量各指标对风险综合评价的贡献时,应赋予不同的权重.设ci∈C,则

式中 P(d|C)为评估结果对整个条件属性域的依赖度,P(d|C-{ci})为评估结果对去掉评估指标ci后得到对剩余条件属性域的依赖度.将上式的P(d|ci)进行归一化处理,得到ci的权重:
式中 εi是由大量历史数据和粗糙集方法确定的ci的客观权重,设专家的经验知识直接确定的ci的权重为σi,则综合权重表示为

式中 w1和w2是系数,w1+w2=1.
3.5 属性特征相似性度量方法
特征相似度是描述两个不同事例在同一特征属性上的接近程度.定义汽车行驶过程中的状态ui,uj⊆U,它们在某一属性ai上的相似度可以表示为[9]

式(9)中vi,vj分别为对象ui,uj在属性ai上的取值,amax,amin分别为属性ai在其值域Va中的最大值和最小值.考虑两个事例在所有特征属性上的综合相似度,采用加权相似性度量方法表示为

式中 n为约简属性集中属性的个数.
4 应用实例
基于Labview+Carsim软件开发的模拟驾驶平台进行驾驶实验,验证方法的有效性.设置相应道路工况,车辆运行状态与驾驶员状态信息,仿真工况如图4所示.

图4 模拟驾驶工况图Fig.4 Simulated driving condition
截取仿真实验中一段连续15秒的场景,评估汽车行驶过程中的碰撞风险.被评估对象为右车道中间汽车.在一个路面状况良好的双车道上,目标车辆开始加速行驶,在靠近前车时减速行驶,然后换道.设置邻近车辆均匀速行驶,车辆的速度和位置信息已知.
汽车碰撞危险态势评估决策表中的条件属性和决策属性数据由仿真实验和交通事故数据提取得到,然后按照2.2节中表1的方式对以上数据进行量化,结果如表2所示,包括11个对象,每个对象有7个条件属性和1个决策属性.
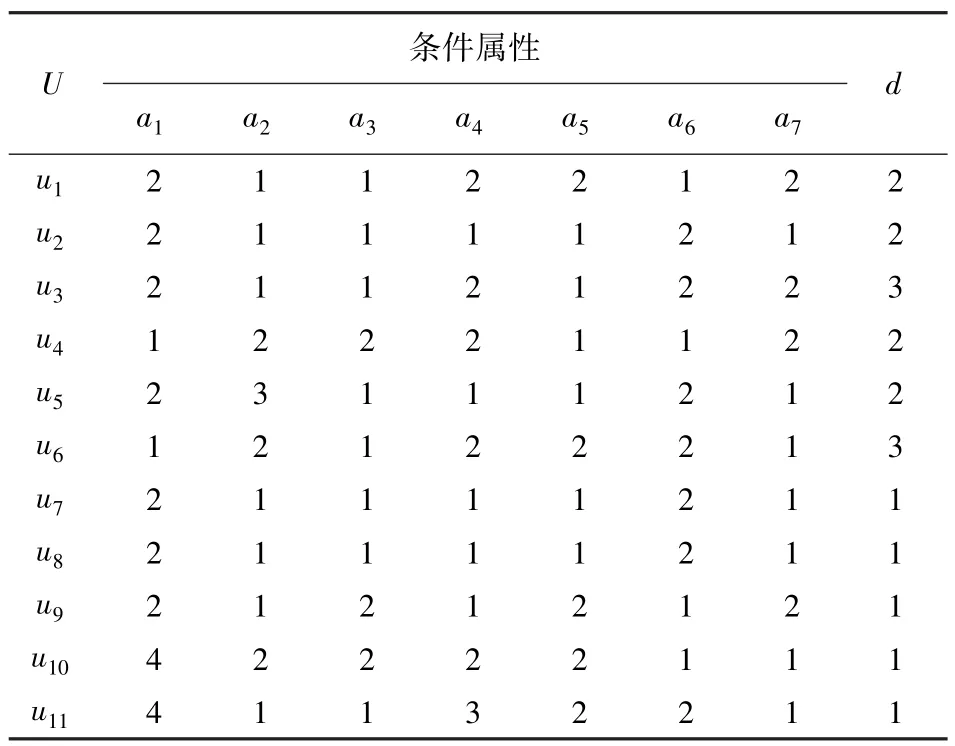
表2 评估决策表Table 2 Evaluation decision table
基于VPRS获取汽车碰撞风险评估知识库的近似约简集,提取汽车碰撞危险评估规则.计算步骤包括以下4个部分:
(1)确定正确分类率β.
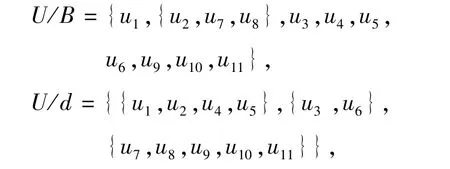
根据表2中条件属性和决策属性对U进行知识划分,U/A有9类:


U/d有3类:根据式(1)求各个属性对应的置信度:
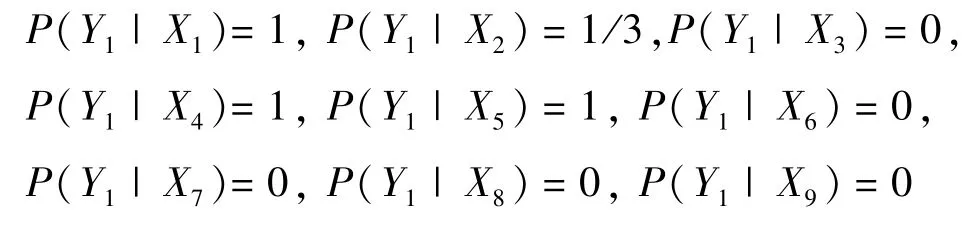
根据式(5),得βY1=0.67;同理,βY2=1,βY3= 0.67.
根据式(3)和β值的确定原则,得β=0.67. (2)求取属性简约集.
根据分类质量的性质,求属性简约集B,使得γβ(A,d)=γβ(B,d),且B⊆A.评估决策表2的简约结果如表3所示.
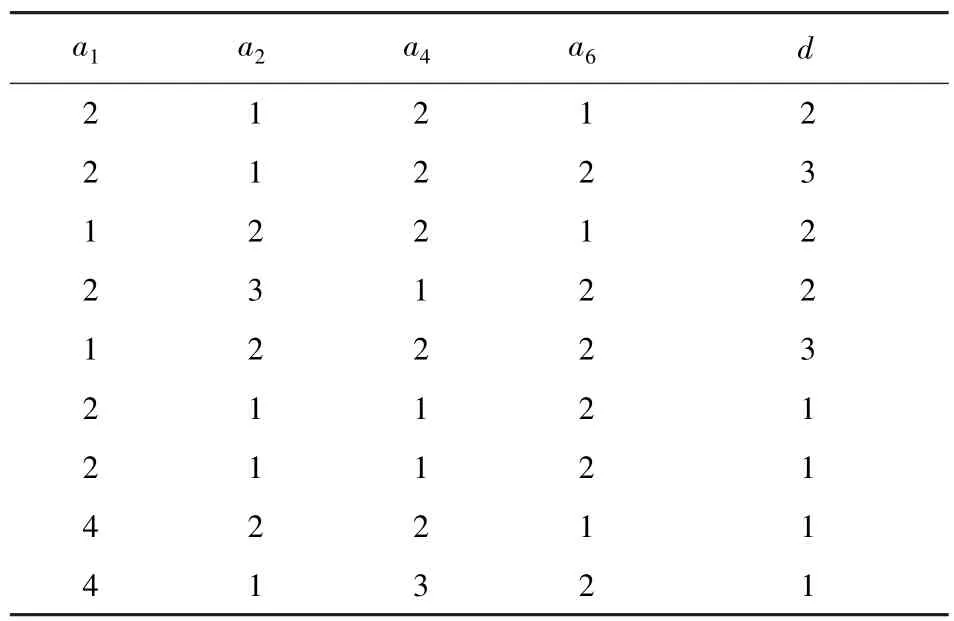
表3 约简结果Table 3 Reduction results
(3)条件属性权重计算.
根据约简后的条件属性B对U进行知识划分:
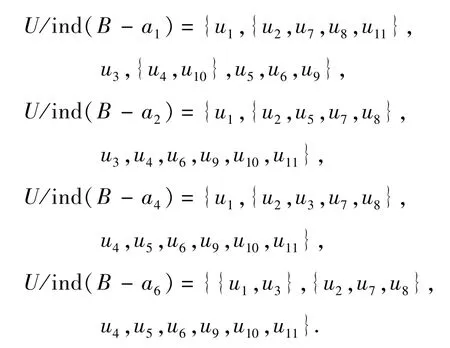
根据式(5)和式(7)计算出{a1,a2,a4,a6}的属性的权值为
ωi=[0.182 0.364 0.364 0.182]进一步归一化处理,得
ω′=[0.166 7 0.333 3 0.333 3 0.166 7]
(4)碰撞风险态势评估方法.
对驾驶过程中的行车安全状态进行态势评估.例如,在tj=7.3 s时,汽车当前的状态为{左转向灯亮,车速43 km/h,制动性能良好,与前车的时距为1.9 s,与后车的时距为7 s,路面情况良好,能见度良好},设汽车此时的行车安全态势为uj(j>11),根据式(9)、式(10)计算uj与评估决策知识库中各对象的加权相似度,得
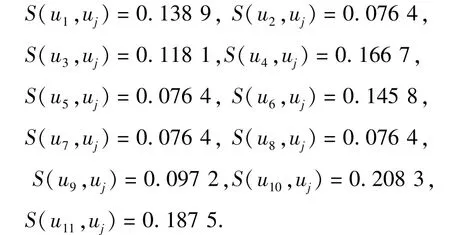
因此,7.3 s时汽车处于安全行驶状态.同理,得到模拟驾驶实验过程中连续15 s的评估结果,如图5所示.
目标车辆初始时在本车道上行驶,检测到前后有车,在7.3 s时开始换道,10.2 s时换道完成,离开本车道.根据文献[10]的方法计算出目标车辆在自车道上与前后邻近车辆的车间距安全阈值和实际车距,如图6所示.
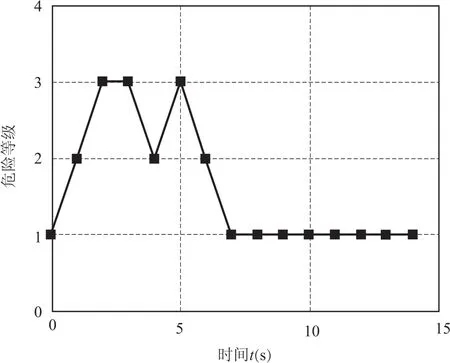
图5 汽车碰撞危险态势评估结果Fig.5 Car collision risk situation assessment results
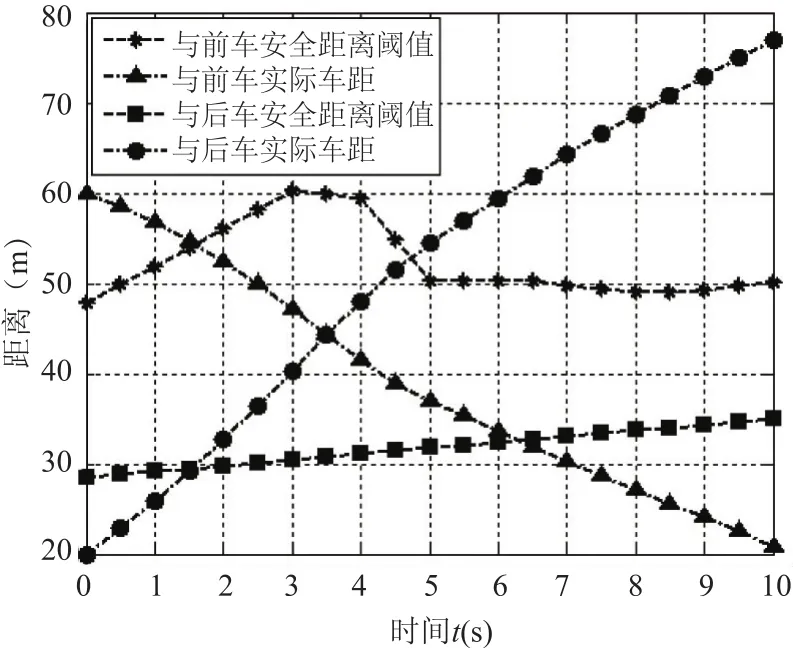
图6 实际车间距与安全阈值Fig.6 The actual distance and safety threshold between neighbouring vehicles
现有的防撞预警系统主要通过比较目标车辆与周围车辆的实际距离和安全距离阈值,判断汽车的行车安全状态.本文将所提出的方法和传统的方法结果进行对比.从图5可以看出,初始时刻,由于目标车辆与后车靠的比较近,所以存在一定的风险,但是由于此时的驾驶意图为加速,所以风险较小;当目标车辆加速行驶靠近前车时,风险变大,此时汽车减速并采取换道操作,因而风险又变小.由图6可以看出,从1.6 s开始,目标车辆与本车道前车的实际距离就一直小于安全阈值,因此判断目标车辆处于危险状态,如果考虑目标车辆在7.3 s时开始换道,则目标车辆的行驶状态应该处于安全.
5 研究结论
本文提出了基于变精度粗糙集的汽车碰撞风险态势评估方法,旨在通过决策规则的提取和匹配辨识出汽车碰撞风险,通过分析可知:
(1)本文提出的基于道路多源信息的汽车碰撞危险态势评估方法,与文献[1]、[10]中的方法相比,本文提出的方法综合考虑了驾驶员因素、车况因素、路况因素对行车安全性的影响,更能适应复杂多变的道路交通环境.提出的态势评估模型综合考虑了信息获取、态势察觉与态势评估功能结构,态势评估的决策方法具有规则匹配的功能,决策过程更加完整.
(2)采用变精度粗糙集方法能够建立有效的评估规则,辨识行车过程中的碰撞危险.与传统的风险评估方法相比,VPRS具有明显的客观性,得出的辨识结果更加准确.
[1] 宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势[J].汽车工程,2008,30(4):285-289. [SONG X N,FENG G G,YANG J K.The current stateandtrendsofautomotiveactivecollisionavoidance system[J].Automotive Engineering,2008, 30(4):285-289.]
[2] E Rendon-Velez,I Horváth,E Z Opiyo.Progress with situation assessment and risk prediction in advanced driver assistance systems:a survey[C].In Proceedings of the 16th ITS World Congress,2009:21-25.
[3] R Bishop.Intelligent vehicle applications worldwide[J]. IEEE Intelligent Systems,2000(15):78-81.
[4] 李清泉,熊炜,李宇光.智能道路系统的体系框架及其关键技术研究[J].交通运输系统工程与信息, 2008,8(1):40-48.[LI Q Q,XIONG W,LI Y G. Systemarchitectureandenablingtechnologiesof intelligentroadwaysystem[J].Journalof Transportation Systems Engineering and Information Technology,2008,8(1):40-48.]
[5] 刘效武.基于多源融合的网络安全态势量化感知与评估[D].哈尔滨工程大学,2009.[LIU X W. Network security situation quantification awareness and evaluation based on multi-source fusion[D].Harbin Engineering University,2009.]
[6] A Polychronopoulos,U Scheunert,et al.Revisiting the JDL model for automotive safety applications:the PF2 functional model[C].Proceedings of Information Fusion,2006:1-7.
[7] A J AN.Discovering rules for water demand prediction:An enhanced rough-set approach[J]. Engineering ApplicationsofArtificialIntelligence, 1996,9(6):645-653.
[8] 胡杰,黄长强,赵辉,等.基于变精度粗糙集理论的UCAV态势评估方法研究[J].电光与控制,2010,17 (3):23-26.[HU J,HUANG C Q,ZHAO H,et al. On UCAV's situation assessment method based on variable precision rough set theory[J].Electronics Optics&Control,2010,17(3):23-26.]
[9] 盛步云,林志军,丁毓峰,等.基于粗糙集的协同设计冲突消解事例推理技术[J].计算机集成制造系统,2006,12(12):1952-1956.[SHENG B Y,LIN Z J,DINGYF,etal.Roughset-basedconflict resolution case reasoning in collaborative design[J]. Computer Integrated Manufacturing Systems,2006,12 (12):1952-1956.]
[10] 侯德藻,刘刚,高峰,等.新型汽车主动避撞安全距离模型[J].汽车工程,2005,27(2):186-190. [HOU D Z,LIU G,GAO F,et al.A new safety distance model for vehicle collision avoidance[J]. Automotive Engineering,2005,27(2):186-190.]
[11] 马国胜,白玉,朱彤.交叉口左转与直行车辆动态碰撞风险估计模型[J].交通信息与安全,2012,30 (1):116-118.[MA G S,BAI Y,ZHU T.Collision risk assessment model between left-turn and straight vehicles at intersection[J].Journal of Transport Information and Safety,2012,30(1):116-118.]
Situation Assessment of Vehicle Collision Risk Based on Variable Precision Rough Set
PENG Li-qun1,2,WU Chao-zhong1,2,HUANG Zhen3
(1.Intelligent Transport Systems Research Center,Wuhan University of Technology,Wuhan 430063,China; 2.Engineering Research Center of Transportation Safety,Ministry of Education,Wuhan 430063,China; 3.Automation school,Wuhan University of Technology,Wuhan 430070,China)
Vehicle collision risk identification and warning is one of the key technologies of intelligent collision avoidance system.In view of the problems that the existing vehicle collision avoidance systems keep high false alarm rate and low flexibility in complicated road traffic environment,this paper presents a method for vehicle collision risk identification with the impact from“driver-vehicle-road”multi-factors.A model is established for identification of vehicle collision risk considering the fusion of related factors such as driver state,distance between vehicles,road surface,etc.The relevant information is obtained from cooperative vehicle-infrastructure system(CVIS).Then,the risk situation assessment algorithm is formulated based ontheory of variable precision rough set(VPRS).Finally,similarity degrees between the current driving status and driving status in decision-making table are compared based on attribute weighted similarity,which could get the situation assessment results.The simulated driving results show that this method can be used for fusion of safety related factors and detection of collision risk.
intelligent transportation;situation assessment;variable precision rough set(VPRS);vehicle collision avoidance system;driver-vehicle-road multi-factors;cooperative vehicle-infrastructure system (CVIS)
U268.6
: A
U268.6
A
1009-6744(2013)05-0120-07
2013-04-01
2013-05-13录用日期:2013-05-20
国家自然科学基金(61104158,51178364);教育部新世纪优秀人才计划(NCET-10-0663);武汉市学科带头人计划(201271130445).
彭理群(1984-),男,湖北武汉人,博士生.
*通讯作者:wucz@whut.edu.cn
猜你喜欢
科教导刊·电子版(2021年6期)2021-05-06
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
中国化肥信息(2019年5期)2019-06-25
汽车与安全(2016年5期)2016-12-01
厦门理工学院学报(2016年3期)2016-11-10
广东石油化工学院学报(2016年3期)2016-05-17
中国卫生(2015年2期)2015-11-12
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28