城市环路交通状态自适应判别方法
2013-07-25 06:00:20林信明王伟智
福州大学学报(自然科学版) 2013年1期
林信明,王伟智
(福州大学土木工程学院,福建福州 350116)
0 引言
城市环路作为城市中大运量快速交通干道,其通行能力、行车条件、基础设施等都优于普通城市道路,但也同样受到交通拥挤问题的困扰.对城市环路交通状态进行分析研究,及时、准确地辨识交通状态,是制定合理有效诱导与控制措施的重要前提,同时也是驾驶员决策行驶路径的依据[1].
交通状态是一个感觉量[2],不仅与道路上所通行的车辆数量有关,还与驾驶员的心理承受能力有密切关系.目前,对城市环路交通状态的界定没有明确标准,美国《道路通行能力手册》根据道路交通服务水平LOS(level of service)将交通状态分为六个等级[3],以平均车速、行驶时间、行驶自由度等作为判定标准.我国公安部颁布的《城市交通管理评价指标体系》中将交通状态分为四个等级,以主干道平均车速评价道路的通畅程度[4].多数交通诱导系统用绿黄红三种颜色表示交通畅通状态、过渡状态和拥挤状态.对交通状态的分类数目越多,交通状态类别越精细,交通状态区间的分界越明显.考虑到驾驶员最容易接受的交通诱导设施的三种状态,本文将交通状态分为三类:畅通状态、缓行状态和拥堵状态.
交通状态属于模糊、不确定的概念,不同国家、不同地区的城市环路交通状态都存在显著差异,若以一个固定的标准来区分交通是否畅通或者拥堵,容易造成与驾驶员感官不符的判别结果.随着交通数据采集设备的发展,交通状态可以实现实时、自适应的判别[5].本文提出一种自适应的实时交通状态模糊判别模型,即在历史数据的基础上,根据路段不同的交通流状态,得出相应的阀值,然后根据阀值对交通状态进行自动分类,并且根据实时的交通流数据对阀值进行相应调整,避免因固定标准而产生的不符实际的判别结果.传统判别方法与自适应判别方法的流程对比如图1所示.
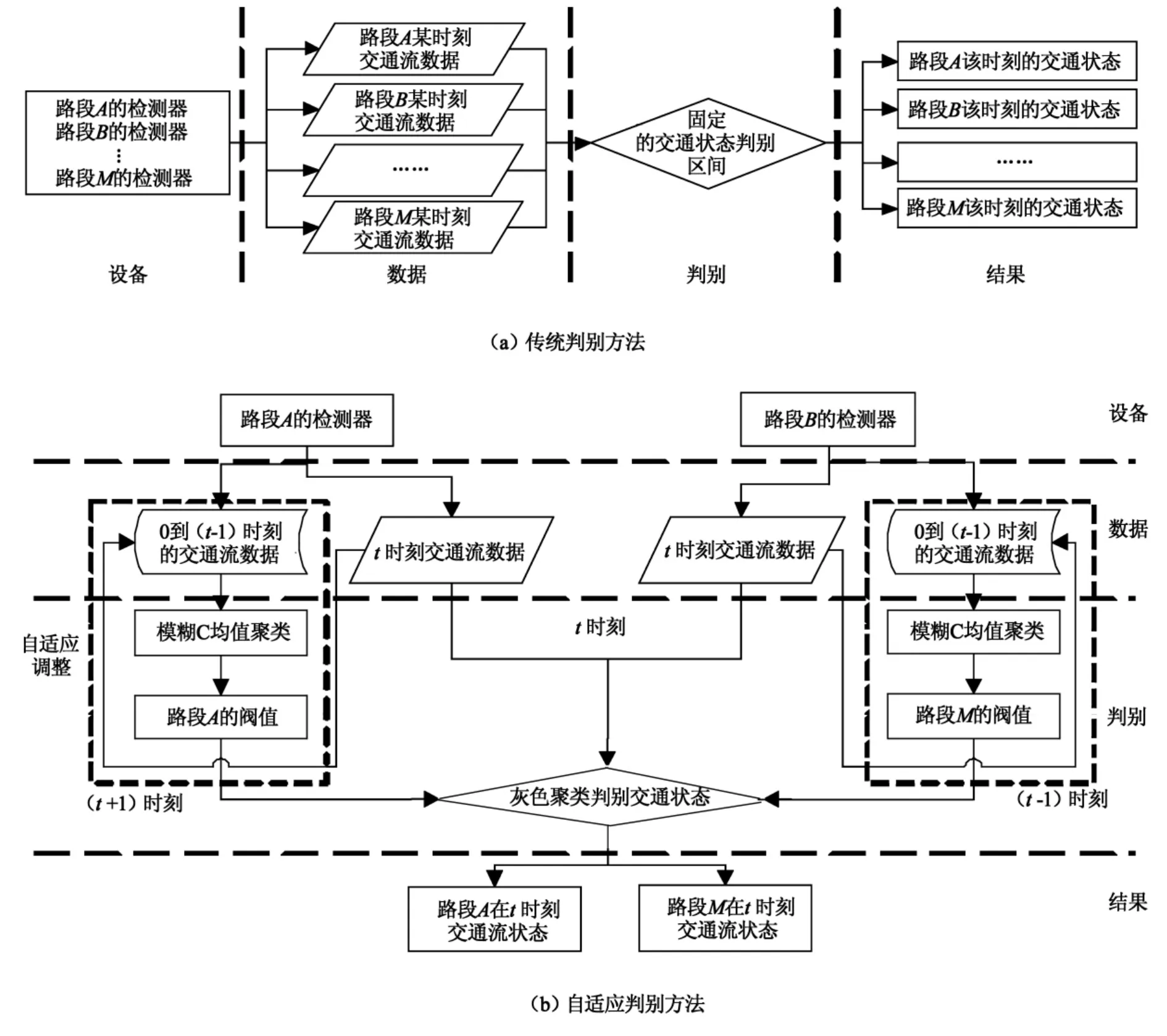
图1 交通状态判别方法对比Fig.1 Comparison of traffic conditions identification method
1 交通状态判别指标选取
1.1 交通流参数
交通流的复杂、多变导致交通状态在判别上具有模糊性与不确定性,交通状态的判别实质上就是对交通流的数据进行挖掘.交通流主要有三个参数:交通流率、车速及交通密度,实际应用中,通常使用容易测量的占有率来间接表征交通密度或者采用间接方法推算交通密度.交通流率、平均车速、交通密度可根据以下公式计算:
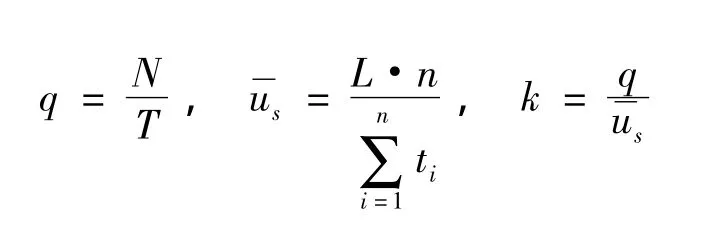
式中:q为交通流率,veh/h;N为时间间隔T内通过检测断面的车辆数;为空间平均车速,km/h;L为行程长度,km;n为行驶该行程L的次数;ti为第i次行程的行程时间,h;k为交通密度,veh/km.
1.2 交通流状态
城市环路通过互通匝道与城市干路衔接或者直接与城市干道相接,由于受到道路条件的限制,城市环路不同路段的交通流状态存在显著差异.以福州二环路作为研究对象,采用视频检测方法与人工调查方法对福州二环路上的交通流数据进行收集,选取福州二环路上的西环中路宝龙段、福屿段和西环北路山海观段作为数据采集点.选取这3个观测点进行数据采集主要是由于这3个观测点晚高峰交通量较大,交通状态随时间变化比较明显,在空间上,3个观测点所处的道路条件不同,交通状态有显著的差异.
通过现场采集的数据,分析平均车速与交通密度的关系,并用Greenshields线性模型[1]对平均车速-交通密度关系进行拟合,结果如图2所示.图2的结果表明,宝龙段与福屿段的平均车速-交通密度关系较为类似,临界密度约为100 veh·km-1,临界速度约为40 km·h-1;而山海观段受道路条件限制,临界速度小于上述两个观测点.若以同一标准界定交通状态,会导致交通状态的误判,因此有必要根据不同的交通流状态,根据路段自身的交通流特点,对交通状态判别阀值进行相应调整,即自适应的交通状态判别.自适应交通状态判别主要是针对不同的交通流状态进行自适应,不论路段的交通流状态差异多大,模型能够根据大量的历史数据对该路段的交通状态阀值进行划分,对不同路段进行交通状态判别,使判别结果达到最优.
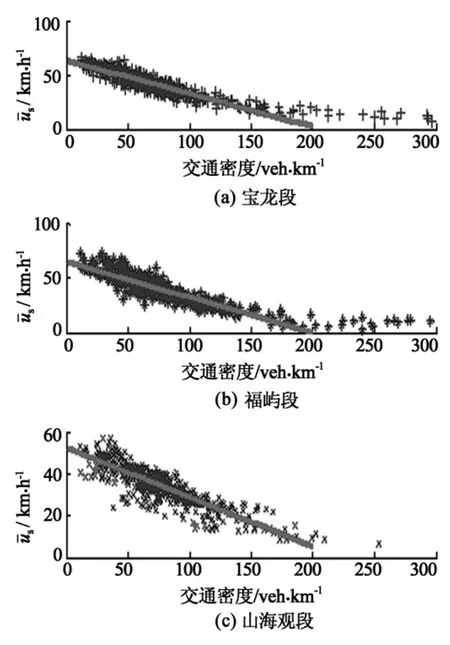
图2 城市环路平均车速-交通密度关系图Fig.2 Relation graph of average speed and traffic density in urban ring road
1.3 交通状态判别指标
交通状态判别指标的选取应遵循实用性、可比性、完备性和可测性等原则,拟采用平均车速us与交通密度k作为交通状态判别指标.平均车速与交通密度k之间由于计量单位和数量级不同,不能直接进行综合分析,为了满足聚类分析的要求,需要对这两个指标进行无量纲化处理.
采用极值化方法对平均车速与交通密度k进行无量纲化,公式如下:
即把每一个变量值除以变量的最大值,由于实时数据中平均车速和交通密度的最大值max有可能是变动的,因此用城市环路的设计车速代替平均车速的最大值,用Greenshields线性模型标定的阻塞密度kj代替交通密度的最大值.所以,一般情况下无量纲化平均车速和交通密度的取值范围在0到1之间,特定情况下有可能会大于1.
2 交通状态判别模型
交通状态划分实质上就是根据交通流的特性,把相似的状态划分为一类,这与聚类分析的概念相吻合.张晓亮等[6]采用模糊C均值聚类与粗糙集结合的方法对快速路交通流状态进行分类;杨祖元[7]等采用基于混合蛙跳算法的模糊C均值聚类方法对城市交通状态进行判定;此外还有K均值聚类、灰色聚类等方法.本文选取模糊C均值聚类方法对各个路段的交通状态边界进行自适应划分,考虑到模糊C均值聚类存在对初始化敏感与容易陷入局部最优解等问题,在边界划分的基础上,采用灰色聚类算法判别交通状态.
2.1 基于模糊C均值聚类的门阀值选取
模糊C均值聚类算法由Bezdek在1981年提出[8],可以用于大规模数据的分析,将多维数据分成特定数目的类.本文应用模糊C均值聚类算法求解不同交通状态的门阀值,其求解步骤如下.
1)初始化.设置聚类类别数c(1≤c≤n,n是数据总数),将交通状态划分为畅通状态、缓行状态和拥堵状态3类,c=3;设定迭代停止阈值ε=0.01;初始化聚类中心V(0);设定迭代计数器b=0.

4)若V(b+1)-V(b)<ε,则算法停止并且输出划分矩阵U和聚类中心V,否则令b=b+1,并转向2).
5)根据划分矩阵U和聚类中心V,获得各个交通状态的门阀值.
2.2 基于灰色聚类的交通状态判别模型
灰色聚类是将聚类对象对不同聚类指标所拥有的白化数,按n个灰类进行归纳整理,从而判断聚类对象属于哪一类的灰色统计法[9].应用灰色聚类方法判别城市环路交通状态的步骤如下.
1)按照评价的要求给出划分的灰类数.将交通状态划分为3类,即灰类数为3,灰类等级k=1,2,3分别代表畅通状态、缓行状态和拥堵状态.
2)给出聚类白化数dij.i=1,2,…,n为各时段检测到的聚类对象,j=1,2,3,…,m为聚类指标,对应选取2个交通状态判别指标,则聚类对象i所对应的第j项指标的聚类白化数为dij.
3)标定聚类权ηjk.
式中:λjk为门阀值,根据模糊C均值聚类的结果,求得门阀值及聚类权.
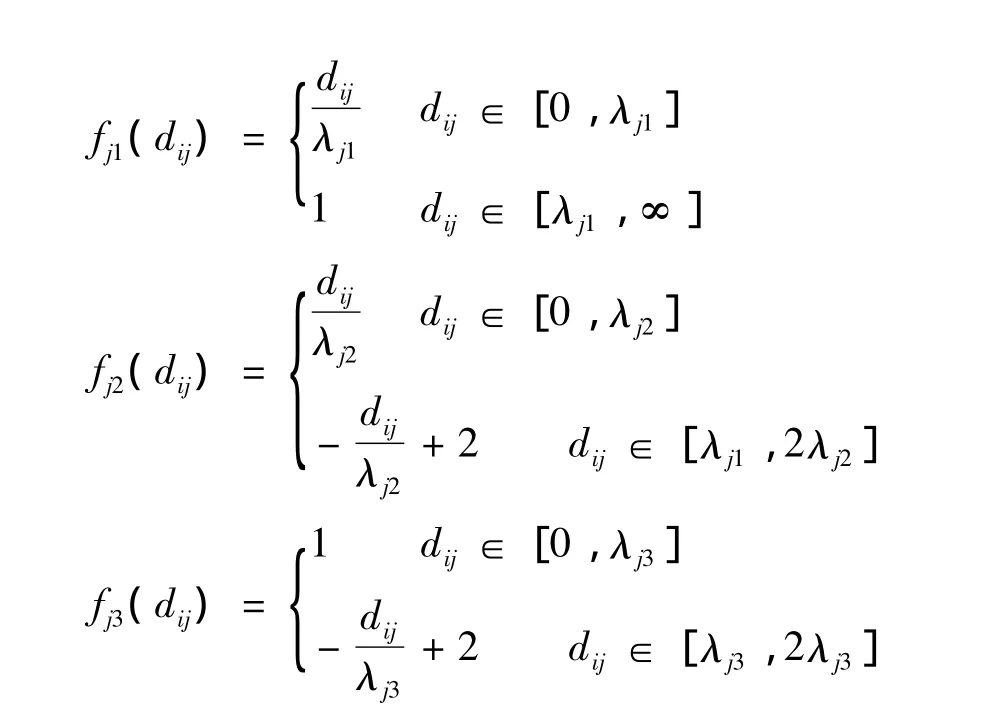
4)确定灰类白化函数.记fjk为第j项指标属于第k灰类的白化函数,各灰类的白化函数fjk如图3所示[10].
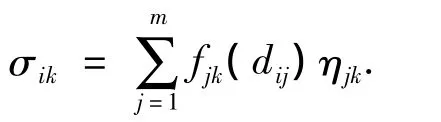
6)构造聚类向量.σi={σi1,σi2,σi3,…,σik}.
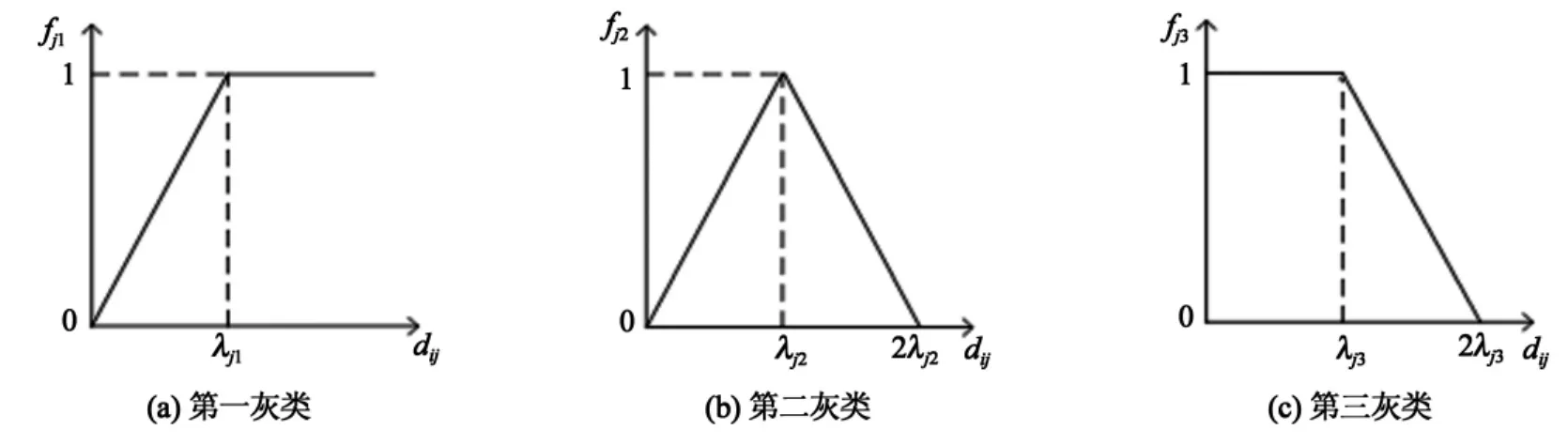
图3 灰类白化函数Fig.3 Grey cluster’s white function
3 实例分析
3.1 实例求解
对福州市西二环中路宝龙段、福屿段和西二环北路山海观段测得的1 711组数据进行分析,首先根据模糊C均值聚类算法求解交通状态的边界值,运用Matlab7.0编程求解,求解结果如图4所示,各个交通状态的门阀值如表1所示.
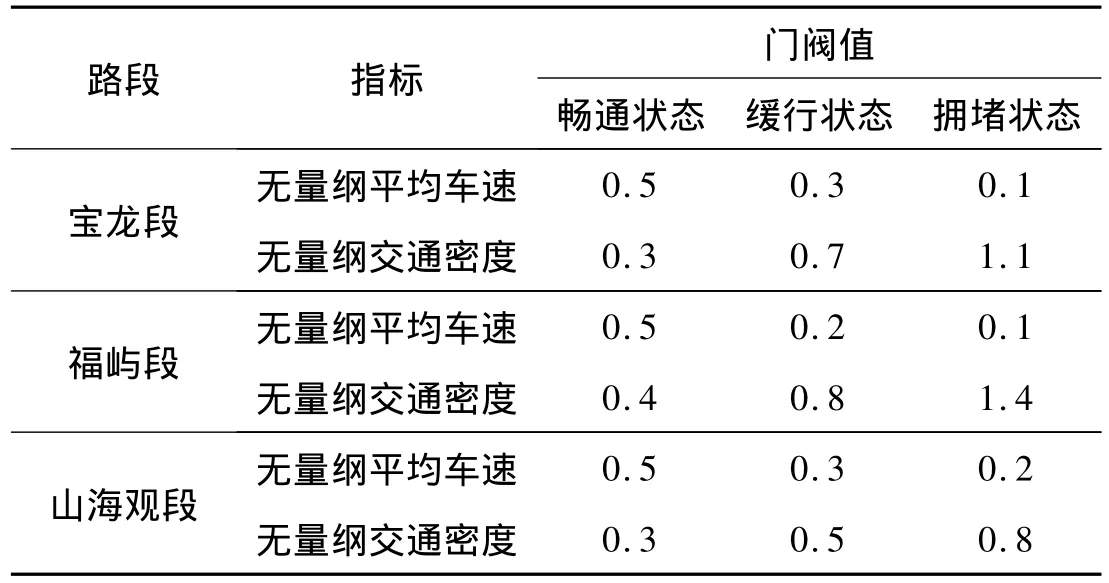
表1 交通状态门阀值Tab.1 Threshold value of different traffic conditions
分别抽取以上三个路段视频检测到的2组数据对交通状态判别模型进行验证,计算结果如表2所示.
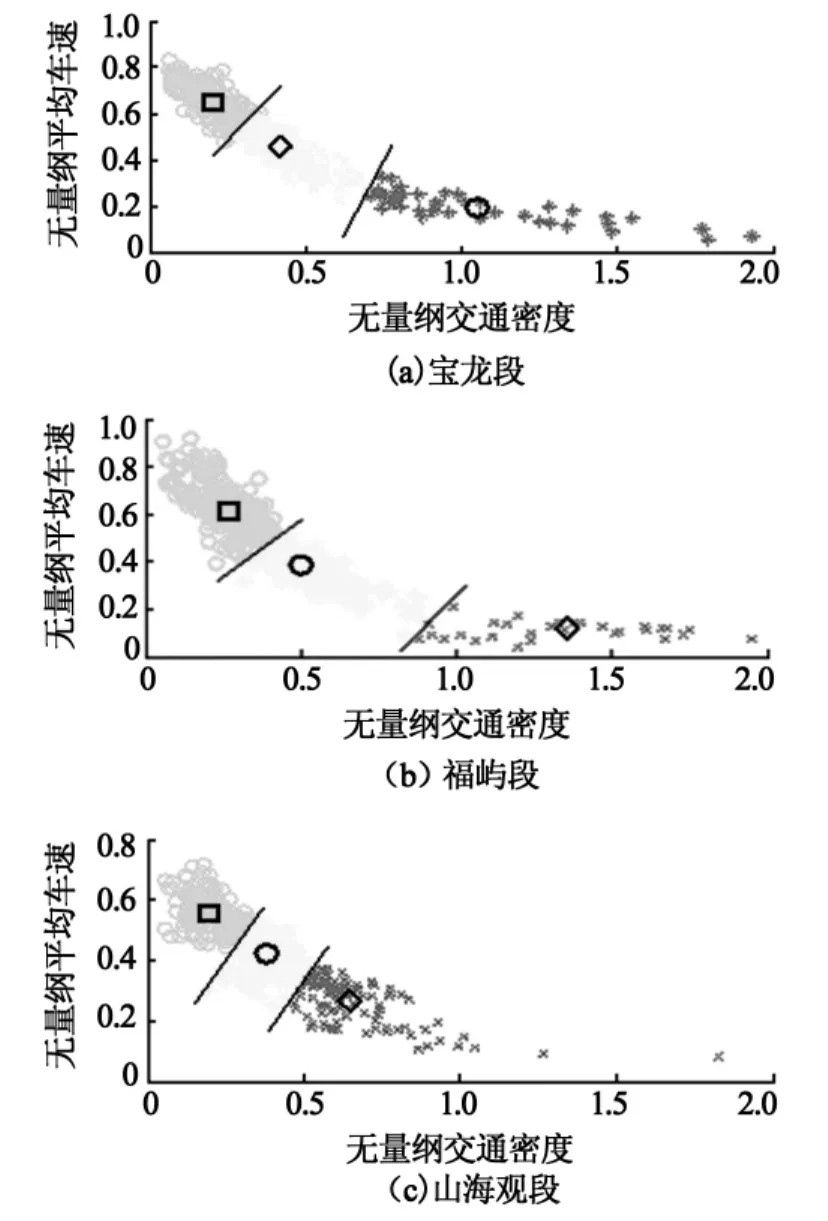
图4 模糊C均值聚类结果Fig.4 Results of FCM
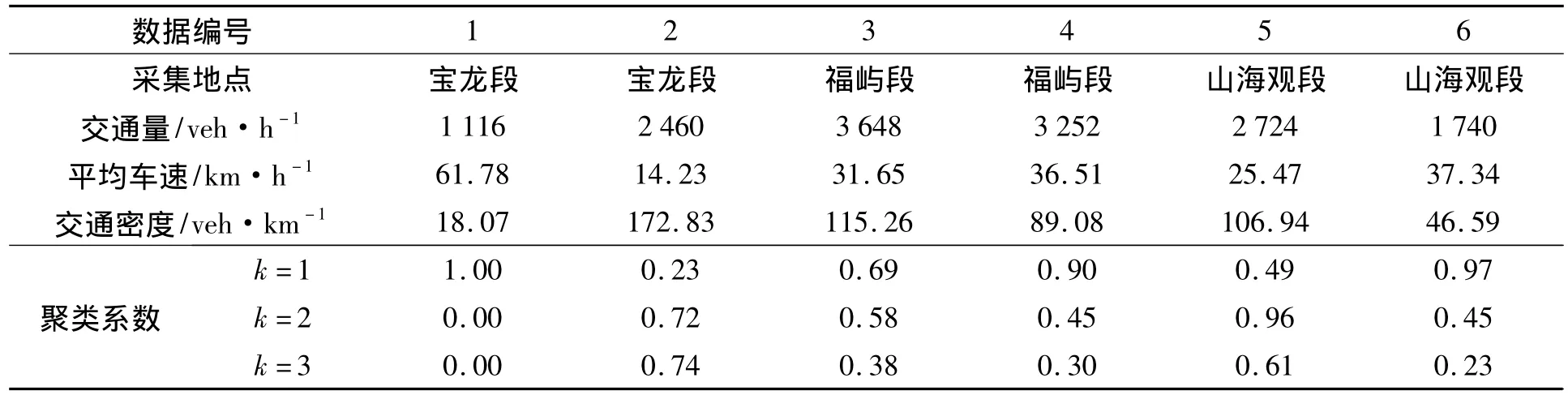
表2 聚类系数计算结果Tab.2 Results of clustering coefficient
3.2 结果分析
由表2聚类系数计算结果可以得出各组实测数据所属的交通状态类别,由于目前没有针对城市环路的交通状态判别标准,选取美国《道路通行能力手册》(HCM)中的道路服务水平标准[3]和公路工程技术标准(JTG B01-2003)[11]作为参照,对比自适应交通状态判别方法与上述两种传统的固定标准交通状态判别方法,结果如表3所示.

表3 交通状态判别结果对比Tab.3 Comparison of traffic conditions identification result
结合表2和表3看出,数据3和数据5交通密度相近,但是由于数据5所处的山海观段受到隧道的限制,在小于数据3的交通密度条件下,已经转入缓行状态.山海观段的平均车速相对其他2段的平均车速小,但是在较小的速度下车辆依然可以比较顺畅行驶.
从表3看出,美国《道路通行能力手册》(HCM)中的道路服务水平标准总体上和自适应交通状态判别方法得出的结论具有一定的相关性,但是不能区分数据3和数据4之间隶属度的差别;而公路工程技术标准得出的结论比较粗糙,与实际结果相差较大,说明城市环路与相同设计速度公路的交通流状态存在明显的区别,而且《公路工程技术标准》已缺少时效性,导致判别结果存在差异.采用自适应交通状态判别方法,可以解决在交通状态存在差异情况下的交通状态判别问题,使结果更符合各路段具体的交通流状态.
4 结语
1)通过对福州西二环中路宝龙段、福屿段和西二环北路山海观段的数据采集,分析各个路段上交通流状态存在的差异,进而提出交通状态自适应判别方法,即根据各个路段的具体情况,自适应选取适合的交通状态判别标准,而不是单一的交通状态判别标准.
2)采用模糊C均值聚类与灰色聚类结合的交通状态判别方法,避免了单纯使用模糊C均值聚类算法造成的局部最优,同时采用模糊C均值聚类计算门阀值,可以减少灰色聚类的主观性.通过实测的数据分析对比,判别结果与实际情况基本吻合.
[1]王晓原,张敬磊,杨新月.交通流数据清洗与状态辨识及优化控制关键理论方法[M].北京:科学出版社,2011.
[2]巫威眺,靳文舟,林培群.基于BP神经网络的道路交通状态判别方法研究[J].交通信息与安全,2011,29(4):71-74.
[3]Transportation Research Board.Highway capacity manual 2010[M].Washington:National Research Council,2010.
[4]公安部交通管理局,建设部城市建设司.城市道路交通管理评价体系[R].北京:公安部交通管理局/建设部城市建设司,2008.
[5]El Faouzi N E,Pham M H.Real-time identification of risk-prone traffic patterns taking into account weather conditions[C]//Transportation Research Board Conference Proceedings.Washington:Transportation Research Board,2011.
[6]张晓亮,张可,刘浩,等.基于FCM-粗糙集的城市快速路交通状态判别[J].系统工程,2010,28(8):75-80.
[7]杨祖元,徐姣,罗兵,等.基于SFLA-FCM聚类的城市交通状态判别研究[J].计算机应用研究,2010,27(5):1 743-1 745.
[8]Bezdek J C.Pattern recognition with fuzzy objective function algorithms[M].New York:Plenum Press,1981.
[9]刘思峰.灰色系统理论及其应用[M].北京:科学出版社,2010.
[10]王华荣,裴玉龙,刑世玲.灰色聚类法在快速路基本路段服务水平评价中的应用[J].公路,2005(5):75-81.
[11]中华人民共和国交通部.JTG B01-2003公路工程技术标准[S].北京:人民交通出版社,2004.
猜你喜欢
汽车维护与修理(2018年1期)2018-04-04 01:13:22
上海公路(2018年4期)2018-03-21 05:57:46
西南交通大学学报(2016年3期)2016-06-15 20:29:35
中国工程咨询(2016年1期)2016-02-14 06:47:44
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12
电测与仪表(2014年8期)2014-04-04 09:19:36
现代防御技术(2014年6期)2014-02-28 18:26:27
铁路通信信号工程技术(2014年6期)2014-02-28 16:58:50