
多目标下滑动电接触最优载荷确定
2013-01-16 00:58回立川陈忠华郭凤仪
电工技术学报 2013年5期
回立川 陈忠华 郭凤仪
(辽宁工程技术大学电气与控制工程学院 葫芦岛 125105)
1 引言
电力机车的受电弓滑板与接触网导线是一个包含物理、化学、电与机械等多学科在内的载流摩擦副[1-8]。滑板和导线的摩擦接触状态直接影响到机车的运行速度和牵引力,因此保证二者的正常可靠连接至关重要[9-12]。影响接触质量的因素很多,包括:磨耗率、接触电阻、载流稳定性和接触温升等。其中载流稳定性以及接触温升都可以通过接触电阻来表示[13,14],由此该滑动电接触可靠运行的实质是保证磨耗率以及接触电阻的最小化,而这两个变量的数值主要受外界运行工况影响,可以看成是接触载荷的函数(运行速度以及载流确定),由此将电接触安全可靠运行问题转化为磨耗率以及接触电阻最小时,对接触载荷寻优的多目标优化问题。
目前各种优化算法都是基于进化算法和群智能算法[15-19],其中人工鱼群算法是李晓磊等在前人基础上提出的一种新型的仿生优化算法,该算法通过模仿鱼群本身的觅食、聚群以及追尾行为实现了对最优问题的求解,在许多优化问题中得到了广泛应用[19]。因此给出了一种基于鱼群算法的多目标优化方法,并将其应用于滑动电接触中,实现对磨耗率以及接触电阻最小化问题的求解。
本文首先通过实验对最小目标的Pareto解进行了示例说明,进而根据实验数据采用神经网络建立了接触载荷、载流以及运行速度为输入,磨耗率和接触电阻为输出的黑箱模型。在此基础上,通过提出的改进多目标鱼群算法,进行最优载荷的求解,得出相应工况环境下的载荷数值,最后给出了相应的Pareto数值解分布图,针对不同运行要求,得到了相应的最优载荷设计方法。
2 滑动电接触实验与建模
2.1 实验数据
采用自制实验机模拟受电弓滑板与接触网导线系统,如图1所示。1和3为滑板,2为滑板移动台,通过电机实现横向移动,用以模拟滑板的Z型轨迹,悬挂砝码实现不同的载荷接触,圆盘周边为导线,可与滑板接触,并通过砝码调整接触载荷,同时圆盘在电机作用下可实现设定速度的转动。
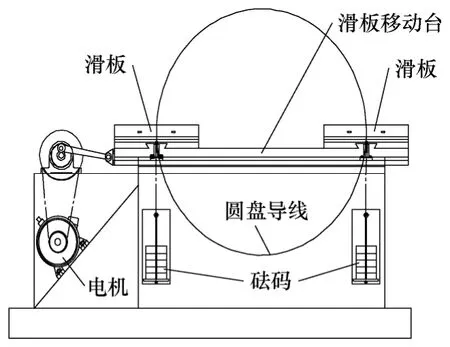
图1 滑动电接触实验机原理图Fig.1 Principle diagram of the experiment machine
按照系统特性,进行滑板与导线相对速度分别是 50km/h、100km/h、150km/h和 200km/h四个不同速度下的运行分析,并改变接触载荷从 40N到120N,载流在 100A到 300A变化,由此得到相应的摩擦磨损量与接触电阻的变化情况。由于摩擦磨损量还与运行时间有关,所以此处选择相同的运行时间,即 15min。并最终转化为磨耗率w来衡量磨损量大小,即滑板相对导线每滑动104km的质量损失,单位为g/(104km),磨耗率取两个滑板的平均值,通过精度为0.01 g的LT1002电子天平称量得到。
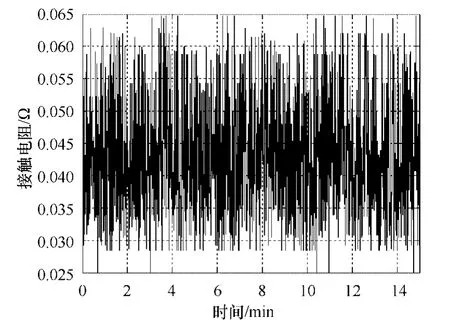
接触电阻R利用通过接触面的电压与电流计算得到,由于接触面间的导电斑点数目剧烈变化,从而使有效接触面积也在迅速变化,导致接触电阻围绕某一个数值上下波动,如图2所示,此时接触载荷 40N,载流 100A,运行速度 50km/h,经过计算平均值为0.068 312Ω。此处采取平均值作为目标函数,最终目标使其最小,也可将波动幅度加入约束中,由此也可保证载流在要求范围内波动,实现载流稳定性要求。

图2 接触电阻随时间变化图Fig.2 Changing of the contact resistance with time
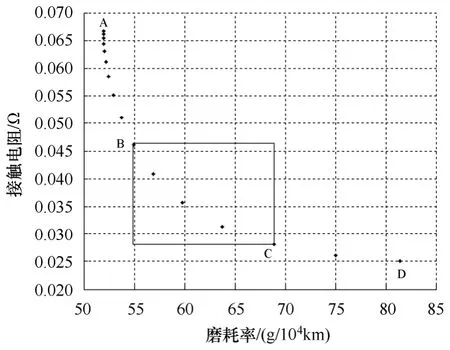
绘制全部实验数据结果,如图3所示,横坐标为磨耗率,纵坐标为接触电阻。方形标注点为载流100A,运行速度100km/h时,接触电阻和磨耗率与接触载荷的变化关系。在接触载荷的增大过程中,磨耗率呈现先减小后增大的变化趋势,而接触电阻却一直随接触载荷增大而减小。这是由于在接触载荷增大时,滑板与铜导线之间的有效接触面积增大,致使电阻减小。而磨损主要由机械磨损和电磨损两部分组成,初始接触载荷较小时,以所产生的电弧侵蚀磨损为主,随着接触载荷增大,导线滑板的离线几率变小,相应的电弧侵蚀磨损也呈下降趋势;当接触载荷达到一定数值后,磨耗以机械磨损为主,此时摩擦力与接触载荷呈现正比关系,故接触载荷越大,相应的磨耗率也就越大。
比较图示中 B、E两点,它们具有相同的磨耗率数值,但从接触电阻来看,B的函数值要小于E;同理,C的磨耗率比F的小。因此进行最小决策时,E、F应该舍去。而 A、B、C、D四个解相互之间没有办法比较,处于冲突关系,A的磨耗率小,但接触电阻大。
由此可见,对于式(1)所示的以磨耗率与接触电阻为目标的优化函数,无法找到使二者都最小的载荷,即接触电阻和磨耗率两个指标具有相互矛盾的关系,不能采用增大或者减小接触载荷的方式同时减小这两个目标。故而只能通过算法找到相对其他解较好的一组边界前沿解,即Pareto非劣解。

式中,w、R为输出的磨耗率、电阻矢量;v、I、F分别表示速度、电流和接触载荷;f(⋅)代表相应函数关系。
通过以下建模方法得到。

图3 磨耗率与接触电阻实验数据分布关系Fig.3 Distributing chart of the experiment data with wear and contact resistance
2.2 建模
在运行工况确定情况下,即运行速度以及载流为固定数值时,改变接触载荷可以得到不同的接触电阻与磨耗率。由此可以根据对目标函数的偏重选择不同的接触载荷。然而通过实验把每个载荷对应的接触电阻和磨耗率都运行一遍不太现实,因此需要建立相应的模型以节约滑板与导线材料,由于仅需要得到输入输出之间的关系即可,故而可以采用神经网络建立其黑箱模型。
以正则化理论为基础的 RBF神经网络形成了输入到输出的非线性映射,具有全局最佳逼近能力,可有效避免对初始依赖和陷入局部最小缺陷,并且网络简洁、学习速度快、泛化能力强,因此选用RBF神经网络对该黑箱模型进行训练。以运行速度、载流和接触载荷为输入层节点,以接触电阻和磨耗率为输出层节点,利用经验公式,确定隐层节点为7,建立模型,对上述数据进行模型训练,其输入层为

式中,Cl=(cl1cl2cl3)T为网络第l个隐层节点的中心矢量,该值可通过随机以及聚类方法获得,因输入数据分布平均,此处选择输入数据的等分点作为中心矢量;bl为第l个节点的基宽,由下式求解

式中,cmax为所选取中心之间的最大距离。输出层

式中,Ts分别代表磨耗率和电阻;wsl为隐层第l个节点与第s个输出节点之间的连接权值。取RBF的逼近性能指标为

得到连接权值计算为

式中,η为学习速率;α为学习动量因子;t为迭代步数;Δwsl通过梯度下降法[20]进行学习更新。

式中,Tsm表示经模型训练得到的第s个输出数据;Tse表示经实验得到的第s个输出。
采用实验数据训练模型得到式(1)所示神经网络非线性函数,进而通过优化算法对其进行优化。
3 人工鱼群多目标优化算法
研究者通过对鱼类生活习性的观察,提炼出鱼类的典型行为,包括觅食、聚群以及追尾等行为,并将此用于优化问题的求解。但将其用于多目标需要进行一系列的调整改进:
(1)觅食行为。本身是对周围食物浓度(目标函数)的判断,进而朝浓度高的地方随机移动。但对于多目标来说,根据Pareto解描述,目标函数的大小不能通过两组解的大小进行对比。因此采取如下条件对目标函数进行非劣比较,如果满足条件①、②,即新位置变量x1支配原位置x2,那就朝新位置变量方向按照式(9)进行移动,否则重新生成。

式中,Newx表示移动后的变量;step是设置的步长;rand是[0,1]之间的随机数值。
条件① ∀i∈ { 1 , 2}个目标,都有fi(x1)≤fi(x2),即对应于变量x1的所有的目标函数值都不比x2的目标函数值大;
条件② ∃i∈ { 1 , 2},使得fi(x1) (2)聚群行为。求解邻域范围的其他鱼,并求出这些邻域范围鱼的位置中心,采用上述非劣条件来进行抉择,是否朝鱼群中心移动;同时引入拥挤距离思想来估计一个解周围其他解的密集程度。判断鱼群是否拥挤,这样新距离比当前的拥挤距离大了,就向这个中心移动。现实意义是食物多,并且不拥挤,那么鱼朝该位置移动。 如图 3所示,B点拥挤距离与相邻两点 A、G坐标欧式距离有关(图中矩形框对角长度),对于任意第k个点,其拥挤距离计算如下 式中,fi(k+ 1 )表示第k+1个点的第i个目标,fimax、fimin分别表示相应目标的最大最小数值,其作用是进行归一化,防止多目标之间数值不匹配。 (3)追尾行为:是某一条鱼对视觉范围内较优位置鱼的一种尾随行为。在多目标中,同样要对非劣解以及拥挤距离进行判断。 具体算法步骤如图4所示。 图4 多目标鱼群算法流程图Fig.4 Flow chart of multi-objective fish colony algorithm 考虑磨耗率与接触电阻的前沿解为凸函数,故选用具有相同特性的测试函数ZDT1[21]进行检验 图5 ZDT1经过优化后的Pareto图Fig.5 Pareto chart of the ZDT1 after optimization 采用设计的人工鱼群算法作为优化算法,设置拥挤度因子δ=0.7,觅食行为尝试次数为5,种群规模N=200,以接触载荷为优化变量,其中运行速度和载流可由决策者根据运行情况确定相应数值(以下以载流为100A、运行速度为100km/h为例),将鱼群个体的位置信息经过转化变为变量数值,输入神经网络训练的黑箱模型,得到输出为接触电阻和磨耗率的两个目标函数,进而逐步进行非劣比较,经过100步的优化后,得到存储的Pareto解集如图6所示。从图中可以看出,调整接触载荷,减小接触电阻的同时意味着磨耗率的增大,这必然会影响到机车滑板的使用寿命。决策者可根据实际情况进行载荷数值确定,主要有以下两个应用: 图6 滑动电接触的非劣解分布Fig.6 Pareto chart of the sliding electric contact 在实际工况中,考虑接触电阻总效应要小,以免产生过大温升影响接触性能,因此应限制平均接触电阻的最大数值;另一方面,从经济性角度出发,磨耗率也应控制在极限数值以下,减少滑板铜线损失。由此,假设要求磨耗率在70g/104km以下,接触电阻的平均数值小于 0.045Ω,得到图中方块区域,此时可控制接触载荷范围63~65N之间,防止超限。在65N情况下,得到接触电阻变化关系如图7所示。此时平均接触电阻为 0.043Ω,磨耗率56g/104km,达到预期设计要求。 图7 优化后接触电阻随时间变化Fig.7 Changing of the resistant with time after optimization 另一方面,决策者可根据Pareto解集,按照自身实际问题需要或者偏重选择相应的接触载荷,如对接触电阻要求不是很大,而希望磨耗率尽可能小,以保证滑板的使用寿命可选择图中A点,进而查找对应的接触载荷可确定为 58.5N;A→B→C→D点对接触电阻的要求逐渐提高,可根据实际运行环境,按照目标侧重选择相关接触载荷。 (1)利用自制实验机,对滑动电接触中的多目标(接触电阻与磨耗率)进行了Pareto解的分析,说明了多目标函数之间相互制约,相互矛盾的关系,提出把滑动电接触接触状态最优问题以及机车安全可靠运行问题转化为多目标优化问题的思路。并将运行速度、接触载荷以及载流为输入,以目标函数为输出训练了三输入两输出的神经网络模型。 (2)对单目标的人工鱼群优化算法进行了改进,将其应用于多目标优化问题中,并通过测试函数进行了检验,扩展了人工鱼群优化算法的应用。 (3)在多目标情况下,对最优载荷问题进行了确定研究,给出了优化后的Pateto前沿解,并针对结果进行了接触载荷的分析,分析了不同工况条件下最优载荷的数值确定问题。 [1] 吴积钦, 钱清泉. 受电弓与接触网系统电接触特性[J]. 中国铁道科学, 2008, 29(3): 106-109.Wu Jiqin, Qian Qingquan. Characteristics of electrical contact between pantgraph and overhead contact line[J]. China Railway Science, 2008, 29(3): 106-109. [2] Ren Zhiling, Guo Fengyi, Chen Zhonghua, et al.Development of high-performance sliding electrical contact testing instrument[C]. Proceedings of the 24th International Conference on Electrical Contacts, 2008,9: 423-427. [3] Lkeda M. The contact force between pantograph and contact wire an estimation method using the inversion technique[J]. Railway Technical Research Institute,2004, 45(2): 80-85. [4] 郭凤仪, 姜国强, 赵汝彬, 等. 基于相对稳定系数的滑动电接触特性[J]. 中国电机工程学报, 2009,29(36): 113-119.Guo Fengyi, Jiang Guoqiang, Zhao Rubin, et al.Sliding electrical contact characteristics based on relative stability coefficients[J]. Proceedings of the CSEE, 2009, 29(36): 113-119. [5] Jia S G, Liu P, Ren F Z, et al. Sliding wear behavior of copper alloy contact wire against copper-based strip for high-speed electrified railways[J]. Wear,2007, 262(7-8): 772-777. [6] 何晓宇, 曾翔君, 杨旭, 等. 电力电子集成模块中压接结构及其电接触特性[J]. 中国电机工程学报,2008, 28(9): 50-54.He Xiaoyu, Zeng Xiangjun, Yang Xu, et al. Pressure contact structure and electrical contact property of integrated power electronic module[J]. Proceedings of the CSEE, 2008, 28(9): 50-54. [7] 吴细秀, 李震彪. 电器电极材料喷溅侵蚀的理论计算[J]. 中国电机工程学报, 2003, 23(6): 96-101.Wu Xixiu, Li Zhenbiao. Theoretic analysis on sputter erosion of electrode[J]. Proceedings of the CSEE,2003, 23(6): 96-101. [8] 臧春艳, 何俊佳, 李劲, 等. 密封继电器接触电阻与表面膜研究[J]. 中国电机工程学报, 2008, 28(31):125-130.Zang Chunyan, He Junjia,, Li Jin, et al. Contact resistance and surface film of sealed relay contacts[J].Proceedings of the CSEE, 2008, 28(31): 125-130. [9] Dong Lin, Chen Guangxiong, Zhu Minhao, et al.Tribological characteristics between third rail and collector shoe under electric current[J]. Tribology,2007, 27(3): 274-278. [10] Ma X C, He G Q, He D H, et al. Sliding wear behavior of copper-graphite composite material for use in maglev transportation system[J]. Wear, 2008,265: 1087-1092. [11] 郭凤仪, 马同立, 陈忠华, 等. 不同载流条件下滑动电接触特性[J]. 电工技术学报, 2009, 24(12):18-23.Guo Fengyi, Ma Tongli, Chen Zhonghua, et al.Characteristics of the sliding electric contact under defferent currents[J]. Transactions of China Electrotechnical Society, 2009, 24(12): 18-23. [12] Yasara, Canakci A, Arslan F. The effect of brush spring pressure on the wear behaviour of copper-graphite brushes with electrical current[J].Tribology International, 2007, 40: 1381-1386. [13] 许良军, 芦娜, 林雪燕. 电接触理论、应用与技术[M]. 北京: 机械工业出版社, 2010. [14] Milenko Braunvic, Nikolai K, Myshkin. Electrical contacts: fundamentals, applications and technology[M].Boca Raton: CRC Press, 2006. [15] 李晓磊, 路飞, 田国会, 等. 组合优化问题的人工鱼群算法应用[J]. 山东大学学报(工学版), 2004,34(5): 5-8.Li Xiaolei, Lu Fei, Tian Guohui, et al. Applications of artificial fish school algorithm in combinatorial optimization problems[J]. Journal of Shandong University(Engineering Science), 2004, 34(5): 5-8. [16] Elena Fernandez, Justo Puerto. Multiobjective solution of the uncapacitated plant location problem[J]. European Journal of Operational Research, 2003, 145(3): 509-529. [17] Carlos A Coello. Recent trends in evolutionary multi-objective optimization[M]. Evolutionary Multi Objective Optimization: Theoretical Advances and Applications, Springer-Verlag, London, 2005: 7-32. [18] Huang Guangqiu, Zhu Huaping, Zhou Jing.Optimization method of multistage stations locating in oil transportation based on fish-swarm algorithm[J].System Engineering Theory and Practice, 2008, 28(3):94-102. [19] 胡晓波, 杨利民, 陈中, 等. 基于人工鱼群算法的PSS参数优化[J]. 电力自动化设备, 2009, 29(2):47-50.Hu Xiaobo, Yang Limin, Chen Zhong, et al. PSS parameter optimization based on aritificial fish-swarw algorithm[J]. Electric Power Automation Equipment,2009, 29(2): 47-50. [20] 王成量, 王宏华, 向昌明, 等. 发电机进相能力的RBF神经网络模型[J]. 电工技术学报, 2012, 27(1):124-129.Wang Chengliang, Wang Honghua, Xiang Changming,et al. Generator leading phase ability model based on RBF neural network[J]. Transactions of China Electrotechnical Society, 2012, 27(1): 124-129. [21] DEB K. Multi-objective optimization using evolutionary algorithms[M]. Chichester, New York, USA:Wiley, 2001.



4 最优载荷确定
4.1 受限载荷确定
4.2 按需载荷确定
5 结论
猜你喜欢
物理学报(2021年20期)2021-12-23
物理通报(2018年5期)2018-05-18
小学生导刊(2018年4期)2018-04-18
中外文摘(2017年19期)2017-10-10
小猕猴智力画刊(2017年3期)2017-03-24
学与玩(2017年12期)2017-02-16
作文与考试·小学高年级版(2016年2期)2016-09-10
电测与仪表(2016年3期)2016-04-12
电测与仪表(2016年20期)2016-04-11
中国科技信息(2015年24期)2015-11-07
