
海上风电串联多端VSC-HVDC协调控制策略
2013-01-16 00:57韩民晓
电工技术学报 2013年5期
李 响 韩民晓
(新能源电力系统国家重点实验室(华北电力大学电气与电子工程学院) 北京 102206)
1 引言
随着化石能源储藏量不断下降和国际能源需求不断增加,可再生能源的发展和应用越来越受到重视[1,2]。风电作为可再生能源之一,由于其资源丰富,技术相对成熟,已经在世界范围广泛应用。风电逐渐成为最经济的发电方法之一[3]。海上风资源丰富且不受噪声和视觉阻挡的限制,近年来海上风电凭借其优势迅速发展,并逐渐趋于远离海岸[4,5]。研究表明采用高压直流(High-Voltage Direct Current,HVDC)的方式传输对于海上风电最为方便经济 。而电压源型变流器(Voltage Source Converter,VSC)的HVDC(VSC-HVDC)以其控制灵活,体积小、具备黑启动能力等特点,特别适合被应用于海上风电场与电网的连接[7]。现有利用HVDC与电网连接的风场都采用在海上建立一个换流站的方式[8]。通过每台风机连接的交流变压器升压至中压,然后集中到换流站转换成直流输送,由岸上逆变器逆变连接交流电网。这种结构电能需要经过多次交流和直流之间的转换,文献[9]考虑到风机本身的结构特点,可以在风机一次变流后直接组成直流网络,由直流并联网络将电能集中到直流升压站,然后由直流传输到岸上换流站,然后逆变连接交流电网,这样就降低了风机和系统复杂度。文献[10]研究发现串联直流结构在长距离风电传输上更具有经济性。
对于串联直流的研究多集中在电流源型变流器(Circuit Source Converter,CSC)串联上,而电压源型串联拓扑很少见。文献[11]给出了一种电压源型串联拓扑结构:风机连接二极管整流和DC/DC,其控制灵活性相对差一些,而且风机侧谐波较大,会使风机叶片振动,文章未对逆变器和风机变流器的协调控制以及风机故障时的处理做出深入研究。本文在其基础上提出一种拓扑结构,采用串联多端VSC-HVDC方式将风场风机相连,网侧采用多电平VSC形式,而逆变交流侧采用多路输入变压器与电网相连。文章同时提出了相应的控制策略,其中风机侧实现了各风机独立最大功率追踪,网侧实现了直流电压和电流控制,并通过选择最优电流和控制逆变器启动和退出实现了系统各变流器的高效运行。最后通过数字仿真验证了该拓扑的可行性和控制策略的有效性。
2 系统描述
系统采用永磁直驱风机(后文简称:直驱风机),因为直驱风机特点与串联拓扑结构相配合,可以将全功率变流器中的逆变器去掉,直接将直流侧串联相接,由此简化风机的结构,并且通过串联升压省掉了升压变压器。在本文中主电路拓扑采用串联多端 VSC-HVDC结构,风机侧电路结构为每台风机与VSC整流器相连,各VSC整流器直流侧串联,然后由直流输电线路输送到岸上换流站,逆变并网,岸上换流站采用多电平VSC结构,其中一个逆变器作为系统中主变流器控制串联电流Idc的大小,其他逆变器控制直流电压,各逆变器交流侧由多路输入变压器连接并网,整个系统主电路结构如图1所示。

图1 主电路图Fig.1 Proposed circuit for an offshore wind farm
图1中Udcw1,Udcw2,…,Udcwn分别为各整流器直流侧电压;Udcg1,Udcg2,…,Udcgn分别为各逆变侧直流电压。
3 风机侧变流器控制策略
风机侧电路结构如图2所示,风机连接VSC整流器。

图2 风机整流器电路图Fig.2 Wind turbine rectifier topology
图2中Ptwn为风机输出功率,Pmwn为永磁同步发电机(Permanent Magnet Synchronous Generator,PMSG)输出有功功率,Emwn为PMSG感应电动势,Lmwn为PMSG的电抗。
系统稳定运行时,由于每台风机所在区域的风速不一致,所以每台风机需要单独控制以实现最大功率跟踪(Maximum Power Point Tracking, MPPT)。
由风机转速和风机输出功率关系曲线如图3所示。由图看出,在风机达到最佳转速时,即风机输出达到最大功率点时,风机输出功率Ptwn对风机旋转角速ωwn导数应该是0。当风机在稳定时Ptwn=Pmwn。
风机和直驱电机间传动等式为

式中,J为风机转动惯量,可以看出通过改变PMSG输出功率来改变风机旋转角速度,减小其输出功率Pmwn则会增大旋转角速度ωwn。即输出功率的大小和角速度的增减方向相反。由此得到[12]

图3 不同风速下风机转速与风功率曲Fig.3 Wind turbine power versus speed characteristic


将每台直驱风机所连整流器串联,因此整流器直流侧电流保持一致,并由主变流器控制。对于每台直驱风机所连整流器可以认为串联电流Idc为常量,直流侧输出功率表达式为

式中,Pdcwn为风机所连接 VSC整流器直流输出功率,由式(3)和式(4)看出功率输出可以通过改变整流器直流侧电压进行控制,整流器的直流电压参考值为控制流程如图4所示。

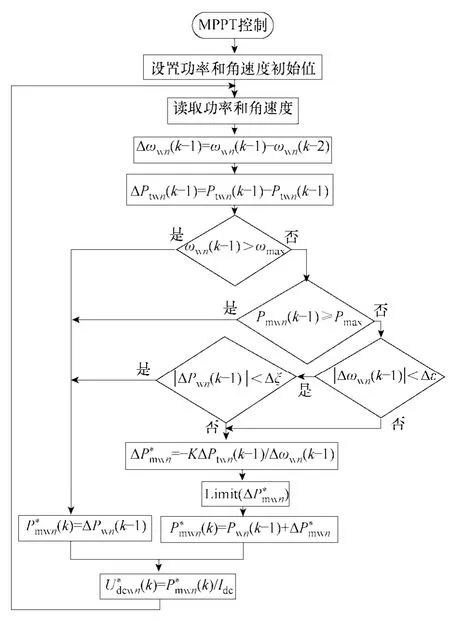
图4 最大功率控制流程图Fig.4 Flow chart of MPPT controller
由直驱风机内环控制算法[13]得到风机侧单独控制算法流程图如图5所示。图5中iawn、ibwn为整流器交流侧输入电流,uawn、ubwn、ucwn为整流器交流侧电压,udwn、uqwn分别为同步坐标轴下直驱电机定子电压,idwn、iqwn分别为同步坐标轴下直驱电机定子电流,Lpmwn为同步坐标轴下直驱电机定子主电抗,ψf为永磁磁通量。
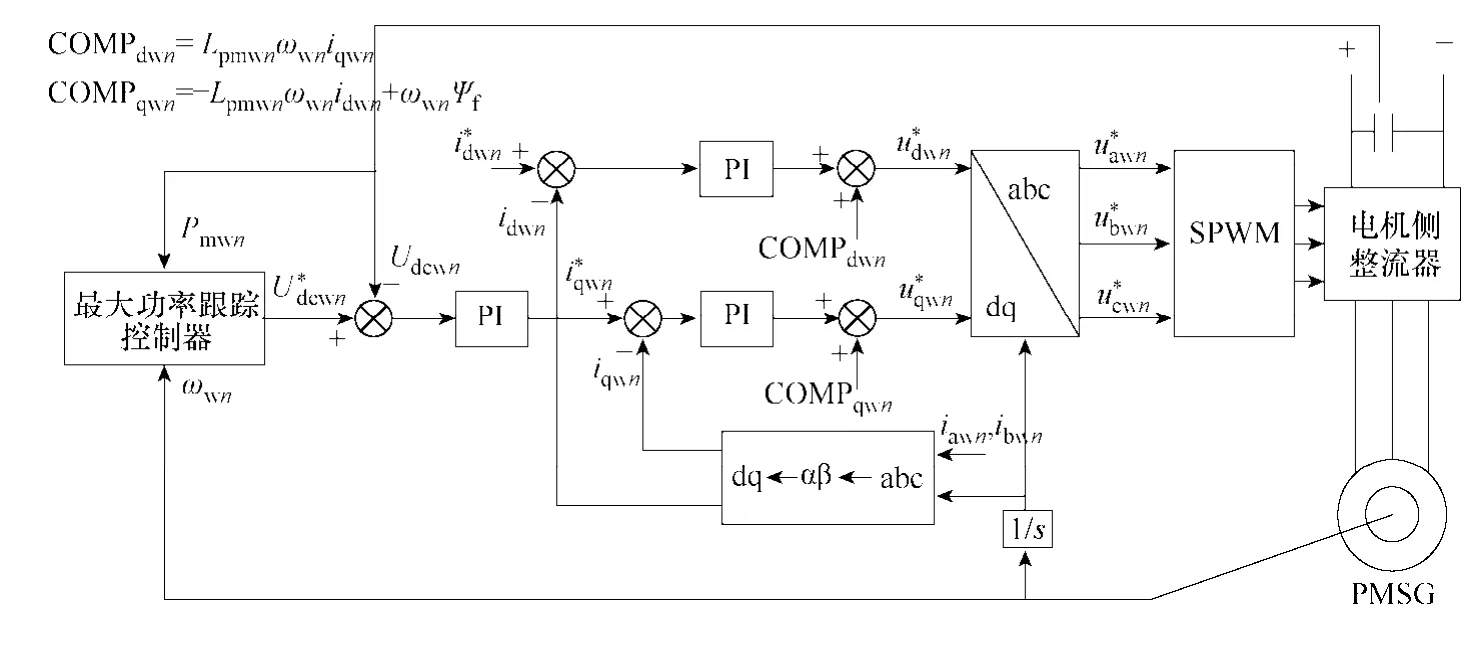
图5 风机侧整流器控制框图Fig.5 Block diagram of the generator-side converter controller
由 PWM整流控制直流侧电压和交流侧电压之间的关系可以表示为[14]


4 电网侧变流器控制策略

根据风能利用公式式中,ρ为空气密度,Aω为风机叶片扫过面积,vω为风速,Cp为风能利用系数,它是叶尖速比λ和桨距角β的函数,在各风速下的最大风能利用系数近似为常量,所以风机输出的最大功率与风速的3次方成近似正比。一般直驱风机的工作风速范围是12m/s到3m/s。可以看出其输出功率相差64倍。由于各台风机串联直流侧电流相同,而各风机所接收的风速并不相同,所以维持一个固定的直流侧电压比较困难,因此输出功率的波动造成的直流电压波动会比较大。如果网侧逆变器采用单端方式,其直流电压工作范围较大,而且会长时间工作在调制比较低的情况下,造成系统效率降低。所以网侧采用多电平结构,在电压降低时可以控制退出一定数量的逆变器,使逆变器始终工作在较高的调制比下。
系统中整流器和逆变器都是以串联方式相连接,各换流器直流侧电流相同,所以需要一个换流器来调节直流电流,使其稳定,这样其他换流器的控制目标才能实现。所以电网侧其中一台逆变器控制策略的控制目标为直流电流和注入电网的无功功率,其他逆变器的控制目标为直流电压和注入电网的无功功率。每台逆变器外环控制采用数字 PI控制;各逆变器内环控制采用线性解耦控制方法。根据逆变器模型其控制过程如图 6所示[13]。图 6中Qgm为逆变器输入电网无功功率,iqgm、idgm分别为同步坐标轴下电网电流,udgm、uqgm分别为同步坐标轴下电网电压,uagm、ubgm、ucgm分别为电网各相电压,iagm、ibgm分别为电网各项电流,Lgm同步坐标轴下并网电抗,ωgm电网频率,θgm同步坐标轴与静止坐标轴之间角度。

图6 网侧逆变器控制框图Fig.6 Block diagram of the grid-side converter controller
5 系统监测控制
系统监测控制主要目的:
(1)计算最优的直流电流参考值。
(2)对网侧逆变器进行有功和无功分配。
(3)风机故障处理。
5.1 计算最优直流电流参考值
整个系统在稳态运行模式下,各台风机均运行在各自最大功率追踪模式下,根据每台风机上报的最小电流、最大电流和优化电流来计算直流电流的参考值。首先取最小电流的最大值,得到直流电流最小值为

然后取优化电流值的最大值,得直流电流优化值为再取最大电流的最小值,得直流电流最大值为


5.2 网侧变流器有功功率和无功功率分配


因为风场输出的有功功率波动较大,系统最优电流波动比功率波动小,所以直流传输线上电压会有较大的波动,为了使岸上逆变器一直工作在效率较高的状态下,即逆变器工作在调制比较高的状态下,系统会随着直流电压波动适当启动或者退出一定数量的逆变器,以维持逆变器较高的工作调制比。
5.3 风机故障处理

整个风场控制系统框图如图7所示。

图7 系统协调控制框图Fig.7 Block diagram of the supervisory control
6 仿真实验
在PSCAD/EMTDC软件上进行仿真实验,验证电路可行性和控制策略有效性。验证系统采用5WM直驱风机,而在仿真过程中为了能够更好地模拟大规模风场,同时也考虑到系统的复杂度和仿真时间,将10个相同的5WM直驱风机合并为50WM的直驱风机束,而逆变器采用同样的方法模拟逆变器群。整个仿真系统由3个串联风机束和3个逆变器束组成,如图8所示。

图8 系统协调控制框图Fig.8 Simulation circuit
首先是对风机侧变流器控制策略的验证。设定固定直流侧电流来验证系统风机侧功率跟踪控制。仿真结果如图9所示。


图9 风场功率波动示意曲线Fig.9 The power waveforms of wind farm
从图中可以看出,在固定直流电流的情况下,整流器输出直流电压随风速变化,也就是风机侧整流器输出功率随风速变化。
验证系统监测控制。设定三束风机所接收风速都从12m/s变化到7m/s,然后再由7m/s回到12m/s。


图10 稳态运行曲线Fig.10 The output waveforms of steady-state
从仿真波形可以看出,随着风速下降,系统选择的最优电流也在下降,由于直流电流的下降速度小于风机输出功率下降速度,所以直流电压也在下降,当直流母线电压下降到使各逆变器调制比到 1的时候,系统将控制退出1个逆变器,剩下两个逆变器调制比将变为 0.7左右;当风速增大,直流母线电压升高,使逆变器调制比降低到0.65左右时,系统重新启动之前退出的逆变器,使各逆变器的调制比再次回到0.9左右。
验证风机故障时控制系统的运行状况。设定 3束风机所接收的风速都为 12m/s,1.5s时编号为 1的风机束因故障切除。仿真结果如图11所示。


图11 故障运行曲线Fig.11 The output waveforms of fault-state
从仿真波形可以看出,当编号为1的风机束被短路从系统中切除后,由于3束风机接收的风速一直相同,而且还在工作的两个风机束的整流器工作状态没有变,所以直流参考电流没有变化,直流电流由于故障产生波动;直流母线电压由于一个风机束的切除而降低,如果3个逆变器全工作则各逆变器的调制比会超过 1,此时系统监测控制一台逆变器退出,使剩余两个工作逆变器的调制比可以维持原有大小。
7 结论
本文提出了以串联多端 VSC-HVDC为基础的海上风电场并网电路拓扑,并提出了系统协调控制策略。控制策略实现了:稳态运行时,各风机达到独自最大功率跟踪控制,并且通过对直流电流的优化控制,使系统中变流器在多数时间工作在调制比较高的情况下,电流也在易于控制范围内,提高了系统效率。仿真结果表明电路拓扑能够稳定运行,协调控制策略能够达到预定目标。对系统故障进行深入研究有助于使该模型的控制更加有效。
[1] 林莉, 陈亚宁, 周溶, 等. 并网型风电场电压稳定研究[J]. 华东电力, 2008, 36(3): 58-61.Ling Li, Chen Yaning, Zhou Rong, et al. Study of voltage stability for grid-connected wind farms[J].East China Electric Power, 2008 , 36(3): 58-61.
[2] 张锋, 晁勤. STATCOM 改善风电场暂态电压稳定性的研究[J]. 电网技术, 2008, 32(9): 70-73.Zhang Feng, Chao Qin. Research on improving transient voltage stability of wind farm by STATCOM[J]. Power System Technology 2008,32(9): 70-73.
[3] Huang Dong, Mao Yuan. The study of control strategy for VSC-HVDC applied in offshore wind farm and grid connection[C]. Power and Energy Engineering Conference(APPEEC), 2011: 1-4.
[4] Popat M, Bin Wu, Zargari, N R. A novel decoupled interconnecting method for current-source converterbased offshore wind farms[J]. IEEE Transactions on Power Electronics, 2012, 10: 4224-4233.
[5] P Bresesti, W Kling, R Hendriks, et al. HVDC connection of offshore wind farms to the transmission system[J]. IEEE Transactions on Energy Conversion,2007, 22(1): 37-43.
[6] F Wang, Y Pei, D Boroyevich, et al. AC vs. DC distribution for off-shore power delivery[C]. The 34th Annual Conference of IEEE Industrial Electronics,2008: 2113-2118.
[7] Jun Liang, Tianjun Jing, Gomis-Bellmunt, et al.Operation and control of multiterminal HVDC transmission for offshore wind farms[J]. IEEE Transactions on Power Delivery, 2011, 26(4):2596-2604.
[8] R Li, S Bozhko, G Asher. Grid frequency control for LCC HVDC link connected wind farms[C]. The 33rd Annual Conference of IEEE Industrial Electronics,2007: 1673-1678.
[9] C Meyer, M Hing, A Peterson, et al. Control and design of DC grids for offshore wind farms[J]. IEEE Transactions on Industry Applications, 2007, 43(6):1475-1482.
[10] Lundberg Stefan. Evaluation of wind farm layouts[R].Nordic Workshop on Power and Industrial Electronics,2004.
[11] Veilleux E, Lehn P W. Interconnection of direct-drive wind turbines using a distributed HVDC converter station[C]. The 35th Annual Conference of IEEE Industrial Electronics, IECON '09, 2009: 584-589.
[12] Jian Gao, Jining Lu, Keyuan Huang, et al. A novel variable step hill-climb search algorithm used for direct driven PMSG[C]. International Conference on Energy and Environment Technology, 2009, 1: 511- 514.
[13] Thongam J S, Bouchard P, Ezzaidi H. Wind speed sensorless maximum power point tracking control of variable speed wind energy conversion systems[C].IEEE International Electric Machines and Drives Conference, IEMDC '09, 2009: 1832-1837.
[14] Xu Lie, Yao Liangzhong, Sasse C. Grid integration of large DFIG-based wind farms using VSC transmission[J]. IEEE Transactions on Power Systems, 2007,22(3): 976-984.
猜你喜欢
科学家(2021年24期)2021-04-25
新世纪智能(英语备考)(2018年11期)2018-12-29
电子制作(2017年19期)2017-02-02
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
探测与控制学报(2015年4期)2015-12-15
