
Matlab在偏置曲柄滑块机构运动分析中的应用
2012-02-24 08:13:42苗君明
电大理工 2012年2期
苗君明
辽宁装备制造职业技术学院(沈阳 110161)
曲柄滑块机构由机架、曲柄、连杆、滑块组成,广泛应用于往复活塞式发动机、压缩机、冲床、内燃机等的主机构中,将直线运动和圆周运动相互转换。内燃机中的机壳为机架、曲轴为曲柄、连杆为连杆,活塞为滑块。作用是将燃烧后的空气产生的压力带动活塞的直线运动转换为回转运动,从而带动发动机旋转。空气压缩机的机壳为机架、曲轴为曲柄、连杆为连杆,活塞为滑块,其中的作用是将回转运动转换为直线运动,从而达到压缩空气的目的。偏置曲柄滑块机构的滑块具有急回特性,锯床就是利用这一特性来达到锯条的慢进和空程急回的目的。本文对偏置曲柄滑块机构的滑块和连杆的运动特性进行了分析,进而更加生动、清晰地表示出各构件的位移、速度和加速度与曲柄转角之间的关系,使设计更加简单、合理。
1 数学模型
本文运用复数向量法,将偏置曲柄滑块机构的运动几何图形看成复平面内一个封闭的向量多边形,将各个杆件看成向量,进行机构的运动分析。
如图1所示,已知参数曲柄长度l1,曲柄匀速转速 ω1,转角 φ1,连杆长度l2,滑块偏心距E。待求参数为滑块位移s、速度v、加速度a、连杆的转角 φ2、角速度 ω2、角加速度 。

图1 偏置曲柄滑块机构
以曲柄固定铰链中心 O为坐标原点,建立直角坐标系,取封闭环OABCO,矢量方程为:

(2)式对时间 t求一阶导数,可得到滑块的速度v,和连杆角速度2。即
(2)式对时间 t求二阶导数,可得到滑块加速度a、连杆的角加速度 ,即
2 应用实例
已知曲柄 OA 为原动件,长度为l1= 50mm,转速n=1500 r/min,逆时针旋转,连杆长度为l2= 150 mm,偏心距 E=30 mm,确定滑块位移s、速度v、加速度a、连杆的转角 φ2、角速度 ω2、角加速度 。
为了便于比较,选取滑块有极限位置为初始位置,即曲柄的初始转角为φ0=arcsin(E/(l1+l2))=8.63°。利用 Matlab语言对偏心曲柄滑块机构进行仿真得到滑块位移s和连杆转角如图2所示,滑块速度v和连杆角速度2如图3所示,滑块加速度a和连杆角加速度 如图4所示,相应参数如表1所示。
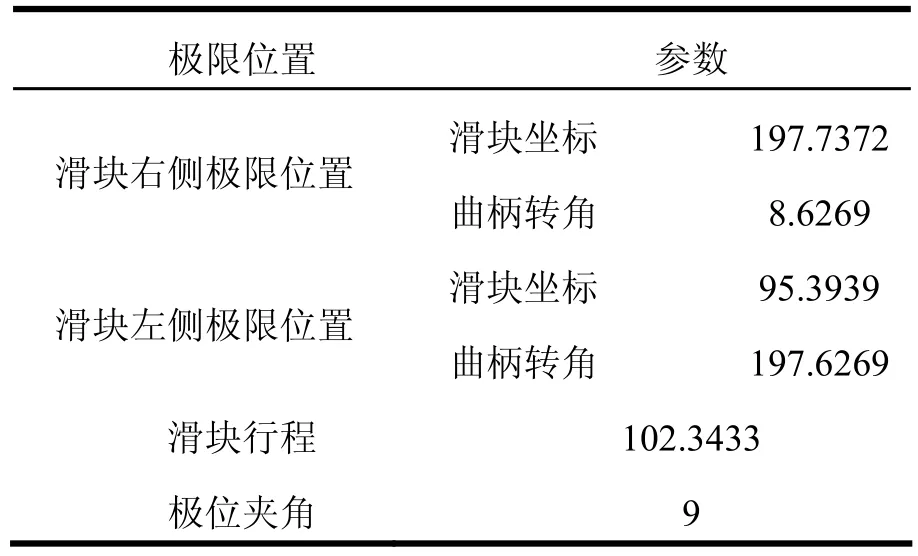
表1 偏心曲柄滑块机构极限位置参数
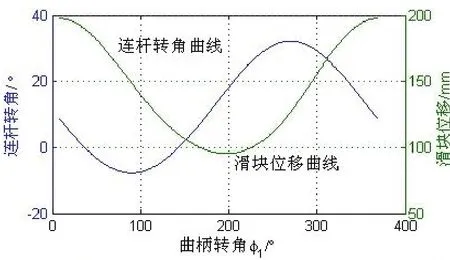
图2 连杆和滑块的位移曲线
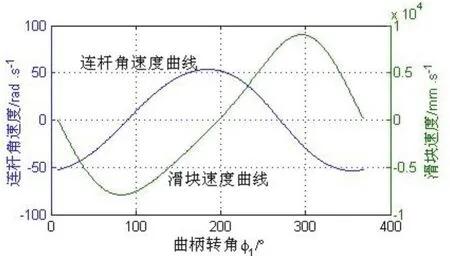
图3 连杆和滑块的速度曲线
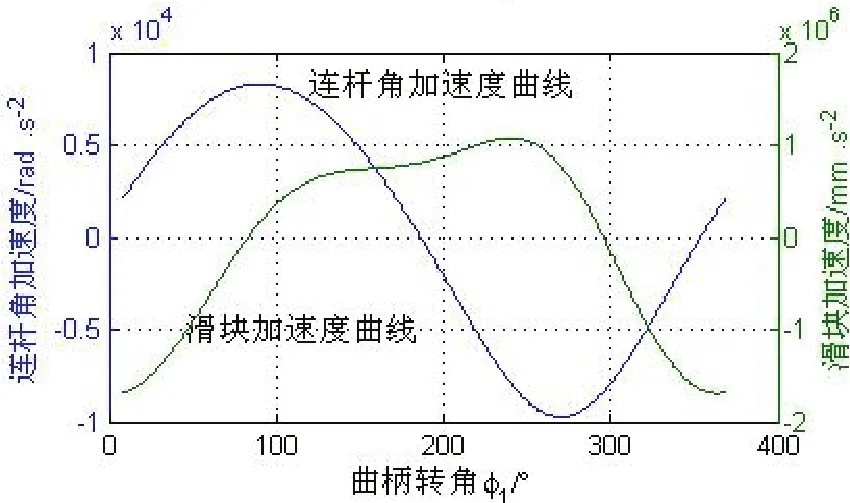
图4 连杆和滑块的加速度图
3 结论
通过构建偏置曲柄滑块机构合理的数学模型,运用Matlab语言对其运动进行分析,十分简洁地得到了各个构件的运动曲线以及滑块的行程和极位夹角,为偏置曲柄滑块机构的设计提供了有效的解决办法。
[1]张全明.对曲柄铰链中心点之解域和非解域问题的讨论.集美大学学报(自然科学版),2009(3).
[2]李滨城,徐超.机械原理 MATLAB辅助分析.北京:化学工业出版社,2010.10.
[3]郭仁生.机械工程设计分析和 MATLAB 应用.北京:机械工业出版社,2012.1.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:32
中国信息化(2022年5期)2022-06-13 11:12:49
机械工程师(2021年4期)2021-04-19 07:27:56
液压与气动(2020年4期)2020-04-10 07:38:52
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
新课程·下旬(2018年10期)2018-01-28 10:56:30
北京航空航天大学学报(2016年6期)2016-11-16 01:50:49
计量学报(2014年3期)2014-06-07 10:02:35
河南科技(2014年6期)2014-02-27 14:06:47
