基于双向线性插值的车道辅助系统障碍避让研究
2022-06-13 11:12覃振杰熊铎程林智桂覃高峰廖尉华
中国信息化 2022年5期
覃振杰 熊铎程 林智桂 覃高峰 廖尉华
车道保持辅助系统是应用在智能车辆上,为驾驶员提供辅助避免驶出车道的智能辅助系统。其设计一般有两种,一是当车辆即将行驶出本车道时,对车辆提供转向辅助使车辆回到本车道内;二是以车道中心线为车辆的期望行驶路径,当车辆偏离车道中心线时控制车辆回到车道中心线上。一般车道保持辅助系统的设计都会同时采用两种控制策略。
在使用摄像头传感器的解决方案中,主要利用对车道线与自车的相对距离与方向进行识别,计算出车道中心线作为车辆行驶的期望行驶路径。这一行驶策略并不能在所有的驾驶场景上带来良好的驾乘体验。例如,智能车辆在行驶中发生会车时,驾驶员往往会偏离驾驶,仅行驶在车道中心线并不能实现这一功能。为了模拟这一驾驶策略,本文基于单摄像头的传感器解决方案,提出了使用摄像头可提供的信息,在满足避让要求下,将车道中心线进行偏置后作为期望行驶路径的局部路径规划方法,以实现智能车辆的避让效果。
(一)双向线性插值
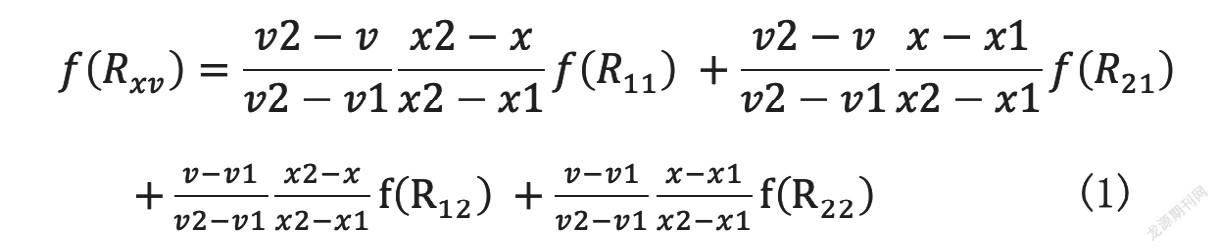
双线性插值实际上是进行了两个方向的单向线性插值计算,其主要算法是利用与待插值点临近的四个点所对应的值进行加权平均,求出待插值点的对应的值。
本文算法中偏置量的计算将自车与避让车辆的纵向距离x、自车车速v构成插值点Rxv,f(Rxv)表示偏置量。使用公式一可快速计算出四个预设点范围内任意点所对应的偏置量。
(二)偏置避让在线算法介绍
在线算法计算偏置量流程为:
1.功能是否开启,若关闭本次运行周期不进行偏置计算。
2.左右车辆是否满足偏置xstar距離要求。
两侧车道上大型车辆距离大于偏置距离时(根据实际情况进行设定,若没有车辆认为车距大于偏置距离),进行偏置量1的计算。
计算偏置量1
偏置量1是车辆偏离道路边缘的横向距离,根据当前自车纵向车速进行单向线性插值计算偏置量1。车速与偏置量成反比趋势。将固定速度点对应的偏置量设置为标定值,通过改变标定值来调整其他速度偏置量。
3.单侧是否有大车距离小于偏置距离
仅有单侧车距小于xstar,车辆类型为避让类型时,判断偏置侧是否为栅栏或道路边缘,若是则取消偏置,否则计算偏置量2。例如,当逐渐驶近右侧车道上的大型车辆,考虑期望路径向左偏。若此时左侧车道线类型为道路边缘,或是右侧车辆距离也小于安全距离,则退出偏置。
(1)偏置量2的计算
偏置量2为与大型车辆靠近时对其避让的偏置距离。用O表示偏置量2,计算O的公式为:
O=|H|-R*M (2)
式中,M表示半车宽度,H为半车道宽度,R为偏置补偿系数。根据当前自车纵向速度v与大车距离x,双向线性插值计算出偏置补偿系数R。
(2)保证偏置后车辆不会驶出本车道
将偏置量O限制在[0,(H-M-T)]的范围之内。其中,T为预设的偏离阈值,H-M-T计算结果为最大偏置量Omax。其中,偏执量从0增加到Omax所需的时间限制为Toffset。
4.退出偏置
若偏置量的绝对值小于0.01,则将偏置量置为0。否则对偏置量梯度下降到0。梯度值由退出偏置时间Texit决定。
5.叠加偏置量。
将计算出的偏置量作用到期望路径上。
为了验证本文避让算法的有效性和可行性,使用MATLAB软件建立仿真环境,模拟车辆行驶过程中对大型车辆的偏置量计算结果。仿真环境下车道宽度设为3.5m,车辆宽度为2m。
(一)期望偏置行驶过程参数设置
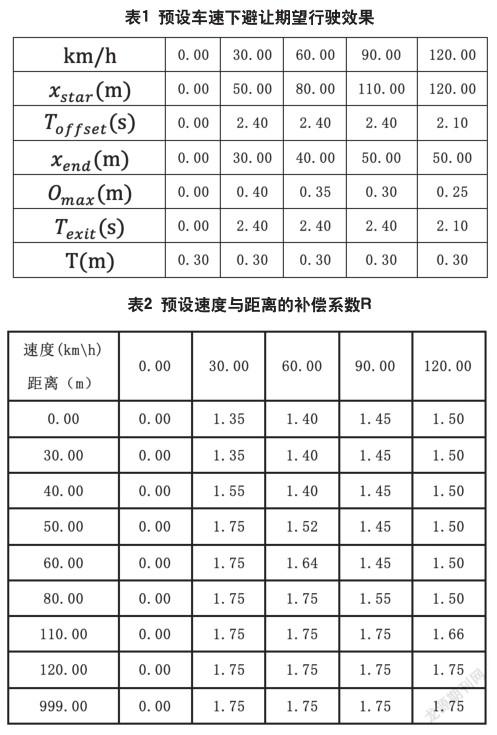
当自车与大型车辆之间的距离小于开始偏置距离,开始计算偏置量,并且在Toffset时间内偏置量从0开始增加到最大偏置量Omax,并保持最大偏置量行驶,直到满足退出偏置条件,退出偏置时间为Texit。在不同车速下,相关参数设定如表1所示。
根据表1,我们由预设最大偏置量计算出对应预设速度与距离点所对应的偏置补偿系数R作为已知插值点的值,用于计算其他情况下的偏置补偿系数R,如表2所示。
(二)根据预设参数进行偏置量计算
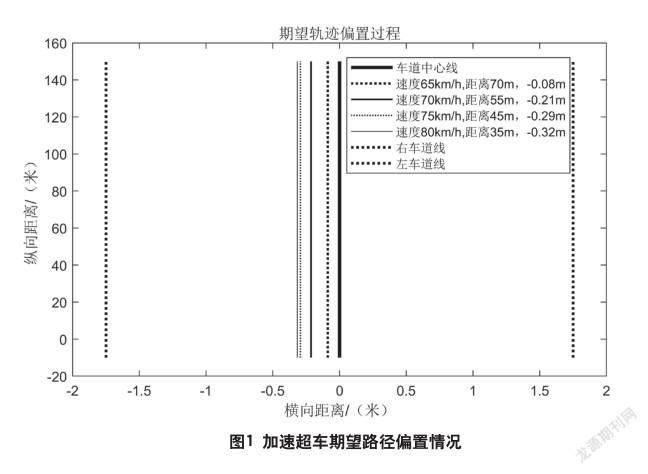
假设1,自车对右侧相邻车道上避让车辆进行超车,自车速度逐渐增加到80km/h且均大于避让车辆,周围环境满足避让要求。根据设定的补偿系数,对以下几种车速和距离进行偏置量的仿真计算。若车距为70m,自车车速为65km/h时,理想偏置量为0.08;若距离为35m,自车车速增加到80km/h,则偏置量为0.32m;此后车辆保持80 km/h的速度或更快车速进行超车,当距离越来越小时,偏置量插值计算结果均为0.32m,直到超越目标避让车辆。上述车辆运动过程中期望路径的偏置变化仿真结果如图1所示。
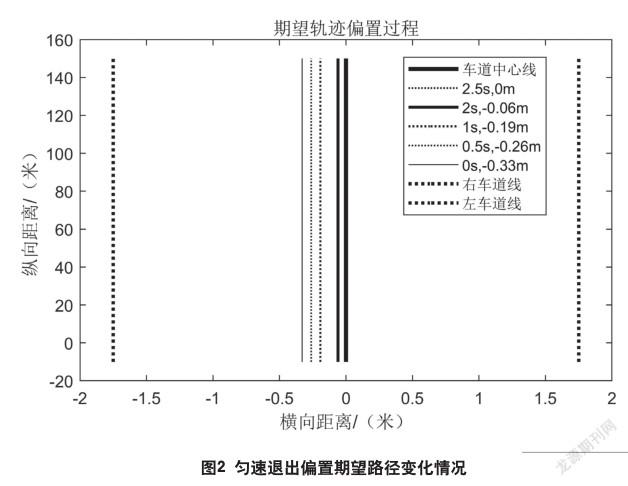
假设2,车辆以70km/h的速度匀速驶离右侧相邻车道上目标避让车辆,由表1可知,完成退出偏置时间为2.4s,由表2插值计算出70km/h的最大偏置距离为0.33m,则开始退出偏置时期望路径已经相对于车道中心线向左偏置了0.33m,偏置量周期衰减梯度值为0.00275m。如图2所示,计算了退出偏置时几个时间点下偏置量的衰减结果,表示期望路径由偏置逐渐回归到车道中心线上的变化情况。
为增加车道辅助系统中智能车辆的避让性,在一定场景下提高系统的智能性与驾乘舒适性,本文提出了根据自车速度与目标避让车辆距离进行双向线性插值计算偏置量的方法,根据预期避让行驶效果,决定避让算法的相关参数,从而计算出预设车速与距离对应的偏置补偿值,作为计算所有偏置量的依据。将预设车速、距离及其偏置补偿值设定为标定量,在实车调试时可根据车辆实际行驶表现快速进行修改,达到不同的避让效果,具有计算简便,调试灵活,实用性强的特点,可以很好增加车道辅助系统的避让性。
作者单位:上汽通用五菱汽车股份有限公司
猜你喜欢
智能计算机与应用(2022年9期)2022-09-28
汽车实用技术(2022年15期)2022-08-19
人民黄河(2021年4期)2021-04-27
动漫界·幼教365(小班)(2019年10期)2019-10-28
科技信息·中旬刊(2018年7期)2018-10-21
环境与发展(2018年6期)2018-09-17
中小企业管理与科技·中旬刊(2017年10期)2017-11-06
城市地理(2017年9期)2017-11-02
计算技术与自动化(2014年1期)2014-12-12
计算技术与自动化(2014年3期)2014-10-28