
永磁式角加速度传感器及其标定方法的研究
2014-06-07 10:02:35吴文韬
计量学报 2014年3期
吴文韬, 冯 浩,2,, 赵 浩
(1.浙江工业大学,浙江杭州 310014; 2.杭州电子科技大学,浙江杭州 310018;3.嘉兴学院,浙江嘉兴 314001)
永磁式角加速度传感器及其标定方法的研究
吴文韬1, 冯 浩1,2,3, 赵 浩3
(1.浙江工业大学,浙江杭州 310014; 2.杭州电子科技大学,浙江杭州 310018;3.嘉兴学院,浙江嘉兴 314001)
介绍了一种新型永磁式角加速度传感器及其机械结构和工作原理,针对该角加速度传感器的标定问题,提出了一种基于机械扭摆机构的标定方法和标定系统。推导证明了其标定原理,并通过实验证明该标定方法和标定系统能客观反映出永磁角加速度传感器非电量输入和输出电压之间的关系,确保了角加速度传感器的标定精度,证明了永磁式角加速度传感器及其标定方法的可行性。实验结果表明传感器的灵敏度约为6.562 μV/(rad·s-2)。
计量学;角加速度传感器;标定方法;误差分析
1 引 言
近年来,随着我国产业升级和工业进步,对于角加速度这一普遍存在于旋转系统中的物理量的检测越来越受到重视。角加速度测量技术迅速发展,并在航空航天、汽车、军工、电子等诸多领域有着广泛应用,角加速度传感器的测量精度也越来越受到重视[1]。
目前,测量角加速度的方法从原理上讲有机械式、电磁机械式、物理、化学、光学的等等。关于机械式角加速度的测量方法,可以分为直接测量法和间接测量法。直接测量法一般使用特殊敏感元件直接测量,间接测量法一般采用多个多方位直线加速度传感器的输出进行合成(是目前的主流方法)以及采用微分电路或微分计算算法对角速度信号进行微分处理来获取角加速度。对于直接测量法,其传感器的结构设计较复杂且受频率等因素影响准确度不高;而对于间接测量法,对信号的处理比较麻烦,特别是延迟特性和噪声放大问题不易解决[2]。
Godler等人报导了一种机械光电式角加速度传感器,将角加速度转化成径向位移,并用光栅盘产生的干涉效应检测偏移量来进行测量[3]。北京自动控制设备研究所设计了一种液环式角加速度传感器,原理是将角加速度转化成工作液体的流动电势,该电势信号需要经过放大电路引出[4]。四川压电和声光技术研究所设计了一种压电陀螺,对传感器输出信号进行微分和滤波后,才可以得到角加速度信号[5]。迟晓珠等人提出了一种压阻式复合惯性加速度传感器,不足之处在于信号传输比较困难[6]。吴校生等提出了一种微流体惯性质量角加速度计,通过检测惯性质量的惯性力来感应输入的角加速度大小,作为微型传感器而言,其结构比较复杂,准确度受限[7]。
本文提出了一种基于电磁感应原理的永磁式角加速度传感器,具有结构简单、使用方便等特点,测量时只需将传感器与被测旋转系统同轴相连即可,可以直接测量旋转系统的角加速度,能够直观反映出各种旋转机械的角加速度随时间变化情况;同时提出了该传感器的标定方法和标定系统。通过实验证明,该标定方法和标定系统能客观反映出永磁角加速度传感器非电量输入和电压输出之间的关系,确保了角加速度传感器的标定准确度,从而证明了永磁式角加速度传感器及其标定方法的可行性。
2 永磁式角加速度传感器
本文提出的新型永磁式角加速度传感器(专利号ZL2008 1 0040244.7)原理结构图如图1所示,由外定子铁心、输出绕组、内定子铁心(永磁)、旋转杯形转子(导电材料)组成。使用时杯形转子与被测旋转系统的转轴相联,随被测旋转系统联动从而测量旋转系统中存在的与角加速度量对应的振动转矩分量。传感器工作原理如图2所示,杯形转子可以看成是鼠笼条数目很多的鼠笼转子,由永磁体产生恒定磁通Φ1,当旋转系统不存在角加速度时,转子导条以恒定转速n逆时针切割恒定磁场Φ1,产生恒定电动势e′,从而产生恒定电流i′,恒定电流i′产生恒定磁场Φ2,此时虽然Φ2与输出绕组交链,但由于Φ2恒定,所以输出绕组感应电动势eo=0。
当旋转系统存在振动转矩产生角加速度量时,则转子的转速n中存在转速变化分量Δn,即存在分量,此时,转子导体切割恒定磁场Φ1,产生感应电动势e′中含有交变分量Δe′,Δe′产生交变分量电流Δi′,交变分量电流Δi′产生交变磁场分量ΔΦ2,交变磁场分量ΔΦ2与输出绕组交链,所以,此时输出绕组的感应电动势eo≠0。由此可知:eo∝ΔΦ2∝Δi′∝,由于磁通Φ1恒定,所以,eo∝

图1 永磁式传感器剖面图
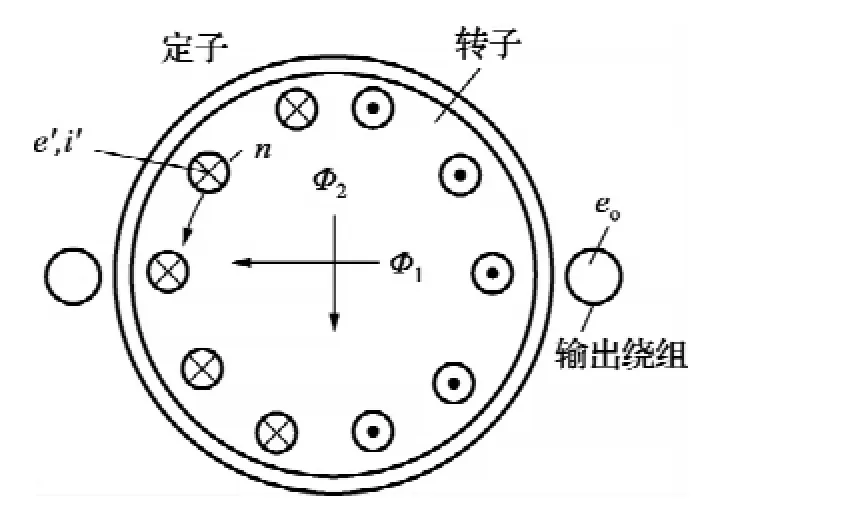
图2 传感器工作原理图
通过用该传感器对实际系统测量,能有效测量旋转系统转轴上存在的角加速度,同时,测量旋转系统中存在的振动转矩分量。图3所示为由本传感器测得的某单相异步电动机产生的角加速度波形。
3 传感器标定实验系统
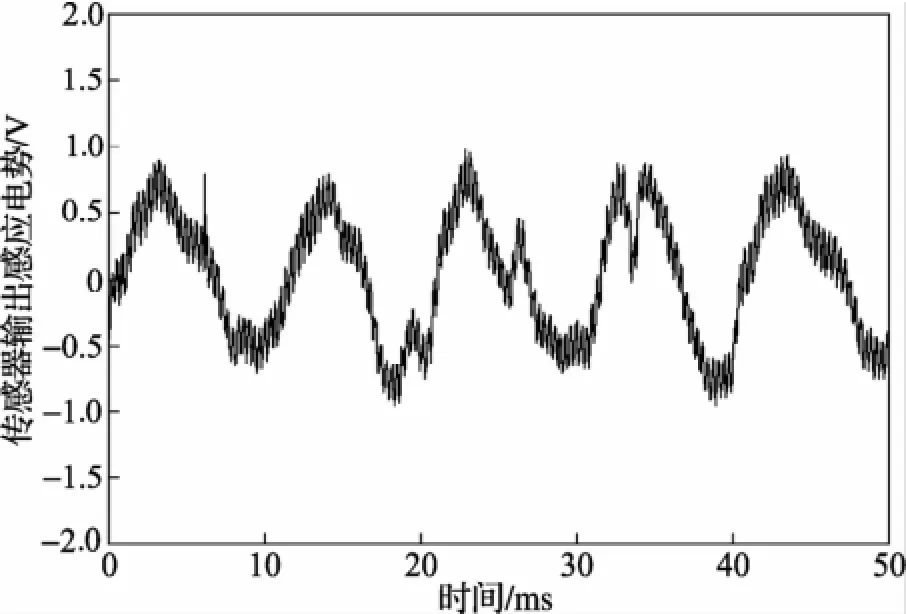
图3 单相异步电机角加速度情况
角加速度传感器精度很大程度上依赖于测试标定的准确度,而角加速度传感器的标定恰恰是角加速度测量技术领域的一个难点。现有的几种标定方法与系统各自存在着问题和局限性,例如:应变片式角加速度传感器采用对多维线速度合成方法来标定该传感器[8];多维角加速度传感器静态标定方法,根据质量-转动惯量等效原理推导出标定的等效数学模型对传感器进行静态标定[9];还有一种角加速度传感器全组合标定方法[10],适用于基于力学原理的角加速度传感器;另外就是利用微分电路直接对角速度进行微分来标定角加速度传感器方法,但此类方法受到模拟电路本身的局限性,使用环境和范围有限,相移和波形失真问题始终存在,难以达到高精度标定的目的。
3.1 标定实验系统
为了对永磁角加速度传感器的工作特性进行标定,本文设计提出了一种基于扭摆的振动特性测量实验平台的扭摆式角加速度传感器标定系统,利用扭摆振动时角度和角加速度的一一对应关系通过角度对角加速度进行计算、标定。实验系统如图4所示。
这个标定系统由上而下是:永磁式角加速度传感器,质量块,螺旋弹簧,角度传感器,数字示波器(左)。系统中所用永磁式角加速度传感器为本实验室具有专利知识产权的永磁式角加速度传感器,专利号ZL2008 1 0040244.7。螺旋弹簧及其支架构成了一个扭摆,成为整个系统扭转振动时的动力源,并通过联轴器上端与质量块相连,下端与角度传感器相连。质量块为自制的圆形中孔铁环,由多种不同大小质量的型号可供选择、组合,以达到不同频率下标定的目的。图中所示为一大一小两块质量块的组合。扭杆贯穿质量块,并通过联轴器与最上端的永磁式角加速度传感器相连。螺旋弹簧及其支架构成了一个扭摆,成为整个系统扭转振动时的动力源,并通过联轴器下端与角度传感器相连,上端与质量块相连,进而与角加速度传感器连成一体。系统中的角度传感器使用深圳市信亚科传感科技有限公司的XYK-BMJ-38Z6-5V10型角度传感器,测量范围360度,电压模拟量输出0~5 V,分辨率12位,能满足高准确度标定永磁式角加速度传感器的要求。数字示波器的CH1、CH2分别与角加速度传感器和角度传感器相连,负责输出、记录扭转振动过程中传感器的输出波形。电源为传感器提供工作电压。
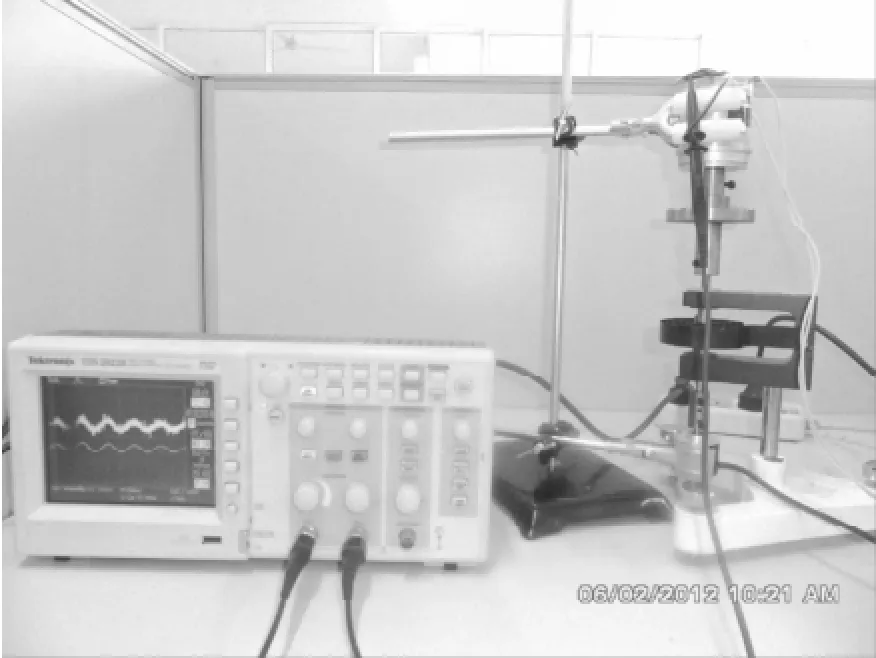
图4 扭摆式角加速度传感器标定系统
标定系统工作时,先人为地给扭摆一个初始的偏转角度(90°左右),放开约束后,扭摆将围绕平衡位置来回振动。这种振动是一种阻尼简谐运动,其摆动幅度可以用角度量来表示,而在这种简谐运动中幅度又与回复力成比例关系,回复力与质量块的质量又决定了此刻系统的角加速度量。因此可以通过对扭转角度量的测量,推导出此时扭摆的角加速度量。并以此量为标准,标定出此时角加速度传感器输出的电量所代表的实际角速度值。
3.2 标定系统工作原理
根据扭摆振动的物理定律得:

式中,β为角加速度,θ为角度,k是螺旋弹簧的弹性系数,I为转动惯量,M为恢复力矩。
根据定义及式(1)、式(2),扭摆系统中角加速度与角度的关系是可以确定的:

式(3)反映了角加速度是对角度时间上的二次微分,及角加速度β在扭摆振动中与角度θ成正比的关系,其比例系数与弹簧的弹性系数和转动惯量有关。
而在阻尼简谐运动时,T的周期是固定的:

于是,对式(3)、式(4)进行整理,消去I和k,得:

由此可以看出,在测得角度量和摆动周期的情况下,角加速度量可以确定。因为是简谐运动,所以周期T为定值(只有在改变质量块的情况下,转动惯量I随之改变,T才会改变),这就推出了此时的β正比于θ。角度改变,角加速度也改变,角加速度传感器所输出的电势eo也随之改变:

即:角度θ与角加速度传感器输出电势eo之间存在确定的比例关系。
对β是正比于θ的情况还有另一种简易理解,即:根据简谐振动的物理定义,扭摆振动时,其输出的θ信号为一标准余弦信号,而角加速度β则是角速度的一次微分,对角度的二次微分。对这里θ所代表的余弦信号的二次微分后得到一组代表β的余弦信号,两组余弦信号波形相似,相位相同而幅值不同。即:β信号正比于θ信号。
上述这种基于扭摆原理的新型角加速度传感器标定系统,能够利用扭摆装置产生可靠、易溯源的角加速度信号,从而对角加速度传感器进行一定频域范围内的标定。从标定方法上来分,它属于绝对法标定,先测定角度,再通过扭摆的结构特征确定其角度与角加速度之间的关系,换算得到角加速度,标定传感器,相对于比较测量法而已,更加直接、准确。
4 标定实验结果与数据处理
对永磁式角加速度传感器的实际测试中,标定系统的角加速度传感器和角度传感器分别接于数字示波器的CH1端口和CH2端口。输出波形如图5所示。
图5中,上方曲线为CH1,表示角加速度传感器的实际电量输出;下方曲线为CH2,表示角度传感器的实际电量输出。可看到CH1和CH2两条曲线近乎重合,证明了之前θ∝β∝eo的推导。
对此时的波形数据进行采样,并对所得的数据在Matlab上进行滤波去噪,得到去噪后的CH1和 CH2的波形分别如图6和图7所示。
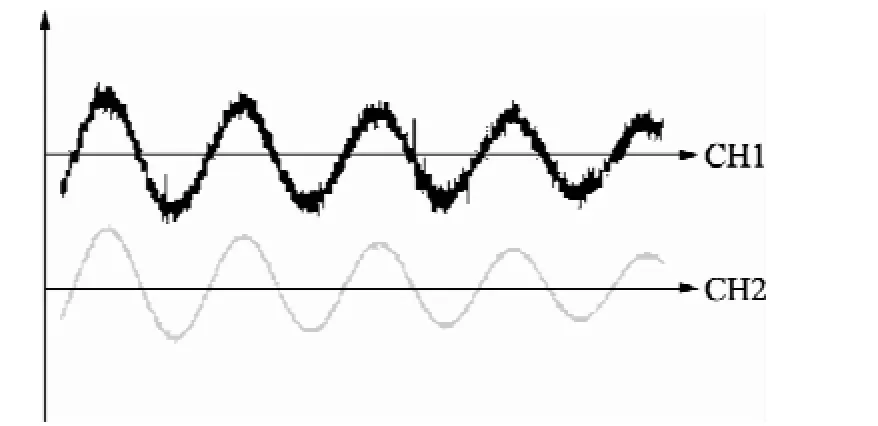
图5 CH1和CH2的输出波形
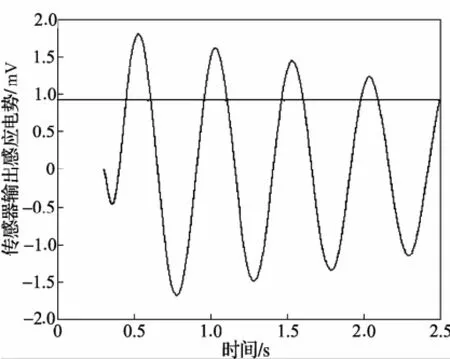
图6 CH1信号滤波处理结果

图7 CH2信号滤波处理结果
对以上两组滤波处理的结果进行记录保存,并将时间轴对齐以消除传感器延迟可能造成的误差。统计峰值出现的时差,求得频率f和时间T,以便下一步的数据处理。
CH2峰值出现时间统计见表1。

表1 CH2峰值时间统计表s
可以看到这组统计数据中,峰值之间的时间差基本是固定的,一个周期T约为0.497 s。这也在实验基础上证明了式(4),在I、k不变的情况下,T为定值的推论完全适用于这套标定实验。
T取0.497 s,对所得数据进行进一步的计算可得某一时刻扭摆转过某个角度时所对应的理论角加速度,用此时的CH1数值去除同一时刻由CH2计算所得的理论角加速度值即得标定系数K,经计算可得灵敏度约为6.562μV/(rad·s-2)(见表2)。
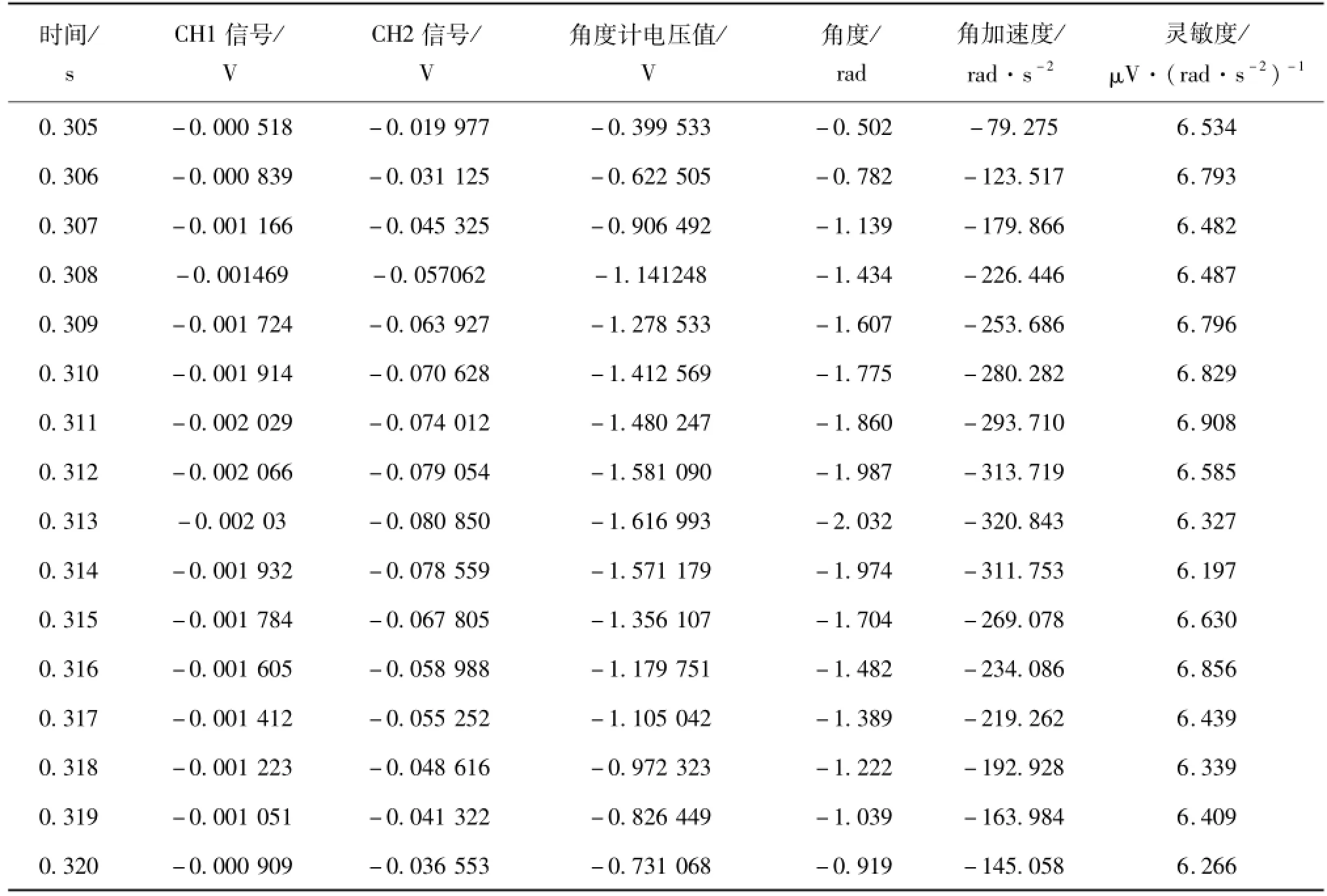
表2 部分CH1、CH2和灵敏度数据

图8f=2 Hz、0.753~1.006 s区间的β-eo特性曲线
其中,角加速度传感器的输出电势eo和角度传感器所计算得出的理论角加速度值β的关系如图8和图9所示。
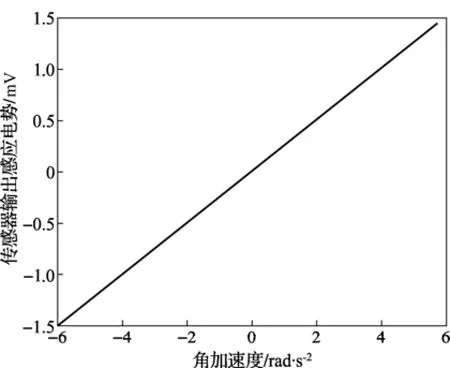
图9f=2 Hz、1.258~1.511 s区间的β-eo特性曲线
图8中,纵轴是角加速度传感器输出电势eo,横轴为根据角度传感器输出所计算得到的理论角加速度,时间区间0.753~1.006 s为一个波谷到波峰的时间段。实验结果可见,角加速度传感器的输出与理论角加速度β线性度良好。
对同一波形另一波时段的波峰进行计算,所得图像线性度依旧良好(见图9)。由此可知,文中提出的基于扭摆原理的角加速度传感器标定系统在实际测试中能有效标定出新型永磁式角加速度传感器,方法可行,效果良好。
5 结 论
本文介绍了一种新型永磁式角加速度传感器并针对该角加速度传感器使用标定问题,提出了一种基于机械扭摆机构的标定方法和标定系统。实验证明,该新型永磁式角加速度传感器能有效测量旋转系统中存在的角加速度量和振动转矩分量,该标定方法和标定系统能客观反映出永磁角加速度传感器非电量输入和电压输出之间的关系,确保了角加速度传感器的标定准确度。由此证明了永磁式角加速度传感器及其标定方法的可行性,具有很好的应用前景。
[1] 彭军,何群,薛景峰.低频角振动台[J].计测技术,2005,25(6):46-48.
[2] 赵浩,冯浩.一种电磁感应式角加速度传感器及误差分析[J].计量学报,2012,33(6):536-540.
[3] Godler I,Akahane A,0hnishi K,et a1.A Novel Rotary Acceleration sensor[J].IEEE control System Magazine,1995,15(1):56-60.
[4] 周蜜.一种新型的角加速度传感器[J].航天控制,1999,17(2):51-54.
[5] 张福学.压电晶体力和加速度传感器[M].成都:四川科学技术出版社,1995,311-325.
[6] 迟晓珠,金鸿章,王劲松.压阻式复合惯性加速度传感器的研究[J].仪器仪表学报,2003,24(z2):262-263.
[7] 吴校生,陈文元.角加速度计发展综述[J].中国惯性技术学报,2007,15(4):458-463.
[8] 王华,等.用频谱分析法处理电动机的振动故障[J].机械研究与应用,2004,(6):60-62
[9] 魏敏,吴忠城,戈瑜,等.多维角加速度传感器静态标定方法研究[J]..仪器仪表学报,2005,26(3):286-289.
[10] 苏虎平,沈三民,安震,等.基于加速度计的陀螺三轴角速率提取算法研究[J].传感器与微系统,2011,30(7):41-44.
A Perm anent Magnet Angular Acceleration Sensor and Its Calibration Method Research
WUWen-tao1, FENG Hao1,2,3, ZHAO Hao3
(1.Zhejiang University of Technology,Hangzhou,Zhejiang310014,China;
2.Hangzhou Dianzi University,Hangzhou,Zhejiang 310018,China;
3.Jiaxing University,Jiaxing,Zhejiang 314001,China)
A new permanentmagnet angular acceleration sensor based on the principle of electromagnetic induction is described,and its mechanical structure and principle are introduced.A new method of calibration angular acceleration sensor based on mechanical torsion pendulum institutions is put forward and proved.The experiments show that the calibrationmethod works well and it can objectively reflect the relationship between the un-voltage input and voltage output of the sensor,and can ensure the accuracy of the result.The experiment proves the feasibility of the permanent magnet angular acceleration sensor and its calibration method,and the sensitivity of sensor is about 6.562μV/(rad·s-2).
Metrology;Angular acceleration sensor;Calibrationmethod;Error analysis
TB934
A
1000-1158(2014)03-0236-06
10.3969/j.issn.1000-1158.2014.03.09
2013-02-05;
2013-05-25
浙江省教育厅科研项目(Y201226082);嘉兴市科技计划项目(2012AYl021);嘉兴学院2012年度自制实验教学仪器设备研究项目(ZS201202)
吴文韬(1985),男,浙江工业大学硕士研究生,主要从事振动转矩测量方面的研究。hz1985jz@163.com冯浩为本文通讯作者。zjhzfh@126.com
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
汽车维修与保养(2020年11期)2020-06-09 05:42:16
液压与气动(2020年4期)2020-04-10 07:38:52
新课程·下旬(2018年10期)2018-01-28 10:56:30
科学与财富(2018年34期)2018-01-15 10:14:54
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
