
极限环境下电缆管道智能巡检机器人自动化控制系统
2024-04-27 06:54任树贞王天义
自动化与仪表 2024年4期
李 乾,郭 康,任树贞,王天义
(1.国网河北省电力有限公司石家庄供电分公司,石家庄 050000;2.河北驰海科技有限公司,石家庄 050000)
电缆管道通常用于电力、通信和其他类型的数据传输,由于它们的重要性,定期巡检和维护是必不可少的[1],但这是一项艰巨的任务。因为它们可能位于地下、水下、高山或其他难以到达的地方。在这种情况下,智能巡检机器人的应用变得越来越普遍[2]。在电缆管道巡检领域,由于其工作环境往往复杂且危险,导致智能巡检机器人的控制效果不理想[3],为此需要设计智能化的电缆管道智能巡检机器人自动化控制系统,提高巡检工作的效率和准确性,降低人力成本,提高电力、通信等行业的服务质量[4]。同时,减少人工巡检的危险性,提高安全性,为社会创造更大的价值。文献[5-6]通过神经网络模型、灰色预测模型,设计智能巡检机器人控制系统,但均未考虑极限环境对智能巡检机器人自动化控制的影响,而实际电缆管道所处环境既复杂又恶劣,便导致自动化控制效果无法达到理想情况[7-9],为此,本文设计极限环境下电缆管道智能巡检机器人自动化控制系统,提升自动化控制效果。
1 电缆管道智能巡检机器人自动化控制系统
在电缆管道智能巡检机器人中,极限环境指的是那些对机器人运行和功能有重大影响或者限制的环境因素,包括高温、低温、潮湿、干燥、腐蚀等环境条件。电缆管道内部环境属于极限环境,为提升智能巡检机器人自动化控制效果,设计一种极限环境下电缆管道智能巡检机器人自动化控制系统。该系统内主要包含地面控制部分和巡检机器人本体部分。地面控制部分包含自动化控制模块、显示器与无线通信模块;巡检机器人本体部分包含传感器模块、无线通信模块与电机驱动模块。
地面控制部分具备监视与操作功能,利用无线通信模块,完成和巡检机器人本体部分间的信息交互。巡检机器人本体部分利用传感器模块,实时采集机器人运行相关信息,以及电缆管道的环境信息。利用无线通信模块,接收地面控制部分发送的巡检机器人自动化控制量。电机驱动模块依据自动化控制量,生成自动化控制指令,驱动巡检机器人电机,生成对应动作,完成电缆管道智能巡检机器人自动化控制。
1.1 智能巡检机器人自动化控制的无线通信模块
电缆管道智能巡检机器人自动化控制系统中,需要利用无线通信模块,将机器人本体部分采集到的机器人相关运行信息,传输至地面控制部分,并将地面控制部分得到的自动化控制量,传输至机器人本体部分,实现智能巡检机器人的远程自动化控制。但电缆管道内部受高温、高湿等极限环境影响,会导致其内部无线信号传输的衰减速度较快,进而影响地面控制部分与巡检机器人本体部分间的信息传输效果,降低智能巡检机器人自动化控制精度。为解决极限环境下,信息传输时信号快速衰减问题,以漏缆通信的方式,设计无线通信模块,确保极限环境下,地面控制部分与巡检机器人本体部分间信息传输的稳定性[10],提升智能巡检机器人自动化控制效果。无线通信模块的结构如图1 所示。
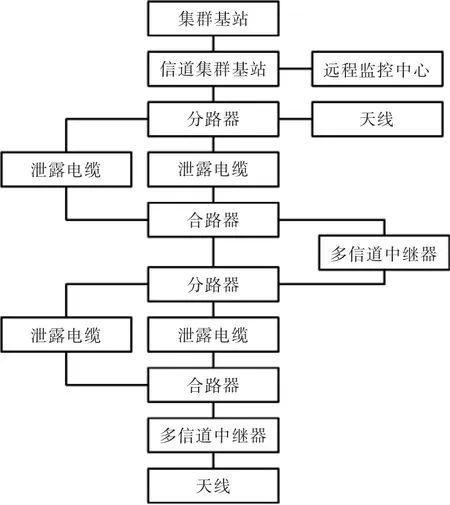
图1 无线通信模块的结构图Fig.1 Structure diagram of wireless communication module
1.2 极限环境下智能巡检机器人自动化控制算法
地面控制部分中自动化控制模块,依据传感器模块实时采集的智能巡检机器人运行速度与姿态信息,设计极限环境下巡检机器人自动化控制算法。因为电缆管道属于高温、高湿的极限环境,所以智能巡检机器人在电缆管道内运行时,受极限环境影响,极易出现打滑情况。为分析极限环境下电缆管道内,智能巡检机器人的运动模型,设置2 个坐标系,第一个为参考坐标系F1(X,Y),第二个为移动坐标系F2(x,y),其中F1(X,Y)是固定不变的。极限环境下电缆管道内,智能巡检机器人存在打滑问题时的运动学模型为
式中:q=[X,Y,θ]为智能巡检机器人实际位姿,(X,Y)为实际位置,θ 为实际方向角;wL、wR为智能巡检机器人左右轮的角速度;r 为智能巡检机器人驱动轮半径;gL、gR为极限环境下智能巡检机器人驱动轮出现打滑时,左右驱动轮的纵向滑动率;σ 为极限环境下智能巡检机器人驱动轮出现打滑时,驱动轮的侧向滑动率;d 为左右驱动轮间的距离。
极限环境下,电缆管道智能巡检机器人的参考位姿qo=[Xo,Yo,θo]需符合式(2)的运动方程,公式如下:
式中:θo为参考方向角;vo为极限环境下,电缆管道智能巡检机器人参考运行速度;wo为参考角速度。
极限环境下,电缆管道智能巡检机器人自动化控制算法,需确保驱动轮和电缆管道壁出现纵向和侧向滑动时,智能巡检机器人位姿符合=0条件,其中,t 为智能巡检机器人的巡检时间。在F1(X,Y)内,极限环境下,电缆管道智能巡检机器人自动化控制误差为
式中:e1、e2、e3为在F2(x,y)内,驱动轮的纵向、侧向、方向误差。
电缆管道智能巡检机器人自动化控制的误差动态方程为
式中:v 为电缆管道智能巡检机器人自动化控制的实际速度;w 为实际角速度。
极限环境下,电缆管道中智能巡检机器人驱动轮出现纵向和侧向滑动时,通过Backsteppong 方法,确定智能巡检机器人的自动化控制量,公式如下:
式中:h1、h2、h3为可调常数。
结合式(1)与式(5),可获取极限环境下,电缆管道智能巡检机器人左右驱动轮的实际自动化控制量,公式如下:
1.3 智能巡检机器人自动化控制的电机驱动模块
利用电机驱动模块,将1.2 小节获取的智能巡检机器人左右驱动轮的实际自动化控制量(wL,wR),转换为自动化控制指令,作用于智能巡检机器人的电机上,生成对应的动作,自动化控制智能巡检机器人完成极限环境下电缆管道的巡检工作。电机驱动模块的连接如图2 所示。
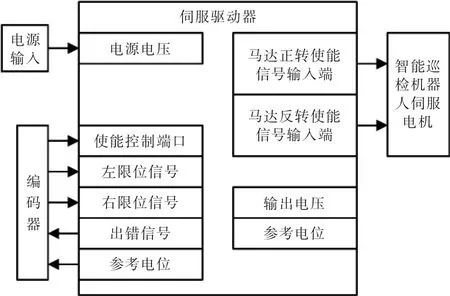
图2 电机驱动模块的连接图Fig.2 Connection diagram of motor drive module
2 实验结果与分析
以某电缆管道智能巡检机器人为实验对象,实验中设置电缆管道的极限环境如下:电缆管道内的温度设置为85℃左右;相对湿度设置为90%左右;气压设置为0.5 MPa 左右。
本文系统在选择漏缆型号时,衰减常数会直接影响漏缆型号选择结果,进而影响通信效果,当衰减常数为260 dB/km 时,漏缆型号选择结果为RCT7-S-1A-RNA,当衰减常数为270 dB/km 时,漏缆型号选择结果为RCT7-CPUS-4A-RNA,分析2 种漏缆型号下本文系统的通信效果,分析结果如图3 所示。从图3 的比较中,RCT7-S-1A-RNA 型号的漏缆在眼图上显示出了更大的有效时间窗,且信号波形平稳无抖动,这表明该型号漏缆在传输数据时能够保持较高的稳定性和准确性。而RCT7-CPUS-4A-RNA 型号的漏缆则表现出了较小的有效时间窗和信号波形的抖动,这表明其在数据传输过程中可能存在不稳定和误差较大的情况,为此,以RCT7-S-1A-RNA 为最终的漏缆型号,可提升本文系统中地面控制部分与巡检机器人本体部分间的通信质量,进而提升智能巡检机器人自动化控制效果。
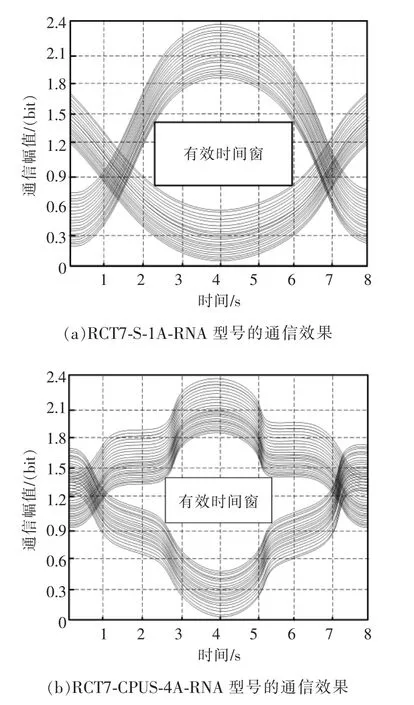
图3 不同漏缆型号时的通信效果Fig.3 Communication effect of different leaky cable models
分析极限环境下,本文系统自动化控制电缆管道智能巡检机器人时,得到智能巡检机器人左右驱动轮的角速度自动化控制量,智能巡检机器人左右驱动轮角速度自动化控制结果如图4 所示,角速度变化曲线越平缓,自动化控制效果越好。从图4 中可以看出,极限环境下,本文系统可有效获取电缆管道智能巡检机器人左右驱动轮的自动化控制量,驱动电机完成智能巡检机器人角速度自动化控制,经过本文系统自动化控制后,智能巡检机器人左右驱动轮角速度的变化曲线均较为平缓,当智能巡检机器人运行至6 s 时,左右驱动轮的角速度均快速下降,说明此时智能机器人存在打滑现象,经过1 s 左右的时间,左右驱动轮的角速度迅速升高,说明此时本文系统完成自动化控制,可确保智能巡检机器人稳定运行。
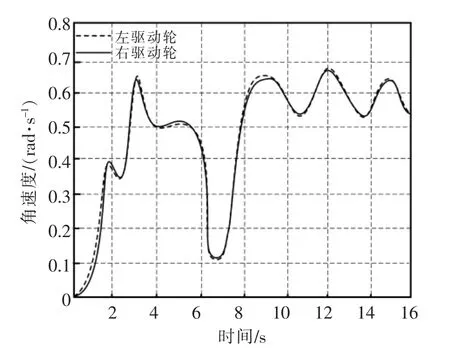
图4 左右驱动轮角速度自动化控制结果Fig.4 Automatic control results of angular velocity of left and right driving wheels
极限环境下,本文系统的智能巡检机器人运行轨迹自动化控制结果如图5 所示。从图5 中可以看出,在极限环境下,本文系统可有效自动化控制电缆管道智能巡检机器人运行轨迹,当智能巡检机器人运行至6 s 时出现打滑现象,导致其运行轨迹出现偏移,经过本文系统自动化控制后,可快速令智能巡检机器人运行轨迹恢复到期望轨迹附近,本文系统在1 s 左右完成打滑现象的自动化控制。经过本文系统自动化控制后,电缆管道智能巡检机器人的运行轨迹,可精准跟踪期望轨迹,提升智能巡检机器人对电缆管道的巡检效果。
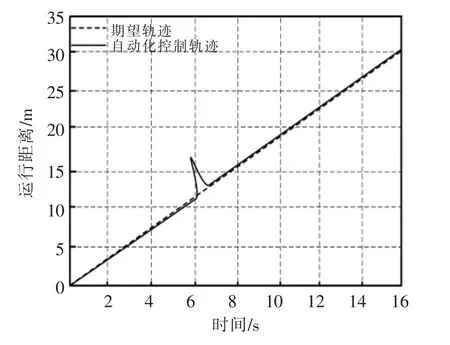
图5 智能巡检机器人运行轨迹自动化控制结果Fig.5 Results of automatic control of running trajectory of intelligent inspection robot
3 结语
极限环境下电缆管道智能巡检机器人自动化控制系统是一种高度复杂和精密的系统,它利用先进的传感器、控制器和执行器等,实现机器人在管道内部的精准移动和姿态调整,确保机器人在极限环境下稳定运行。应用本文系统后可提高电缆管道巡检的准确性,及时发现潜在问题和故障,还可为其他类似环境的智能巡检提供一种可复制、可扩展的解决方案,推动相关领域的发展。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
大众科学·上旬(2020年4期)2020-10-21
中国新技术新产品(2020年4期)2020-05-05
城市建设理论研究(电子版)(2019年12期)2019-10-29
中学生数理化·高一版(2017年3期)2017-07-08
科技创新导报(2016年27期)2017-03-14
铁道通信信号(2016年10期)2016-06-01
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
