
基于二阶滑模算法的步进电机自动升降转速控制方法
2024-04-10 11:41卓状马博坤
现代制造技术与装备 2024年2期
卓状 马博坤 王 珺 王 昭 李 凤
(1.航天长征化学工程股份有限公司,北京 101111;2.宣化科教职业学院,张家口 075100)
步进电机以脉冲方式驱动,步进驱动器每接收一个脉冲信号,就驱动电机旋转一个固定的角度,步进电机的旋转以“步”为最小单位[1]。步进电机还具有自锁能力,通过控制脉冲信号可使电机在任意位置保持静止[2]。从整体上分析,步进电机是一种开环控制系统,无须编码器等传感器反馈信号,因此控制简单,但缺乏对电机实时状态的监测[3]。结合步进电机的特性,在对其进行转速控制时,需要克服的问题包括4 个方面。首先,最大转速的限制。步进电机在高速运转时可能会产生较大的振动和噪声,因此其最大转速受到限制[4]。其次,负载惯量的匹配。步进电机的负载惯量必须与电机的惯量相匹配。再次,控制精度的要求。步进电机的控制精度受到多种因素的影响,如脉冲数量、脉冲频率、负载惯量等[5],需要综合考虑这些因素以提高控制精度。最后,电流和热管理的挑战。步进电机在运转过程中需要控制电流大小以调整转速,同时需要考虑电机的热管理问题,避免过热对电机性能的影响。通过调整脉冲数量和频率来调整转速,采用适当的负载惯量匹配方法提高控制精度,采用先进的热管理技术保证电机的稳定运行。
在此基础上,提出基于二阶滑模算法的步进电机自动升降转速控制方法研究,通过对比测试的方式,验证设计方法的控制效果。
1 步进电机自动升降转速控制方法设计
1.1 步进电机数学模型构建及控制目标
为了实现对步进电机自动升降转速的精准控制,需要充分考虑电机的数学模型、控制目标。为此,首先构建了步进电机数学模型。
步进电机转子的运动方程表达式为
式中:θ表示步进电机的转子角度;ω表示步进电机的转子角速度;θ0表示步进电机的初始角度。
步进电机的电磁力矩方程表达式为
式中:T表示步进电机的电磁力矩;n表示线圈匝数;B表示磁感应强度;I表示线圈中的电流;S表示线圈面积;θ表示磁矩与磁感线的夹角。
步进电机转动方程表达式为
式中:Te表示电机的电磁转矩;TL表示负载转矩;Je表示电机的转动惯量;α表示电机的阻尼系数。
步进电机的阻尼系数方程表达式为
式中:δ表示步进电机的阻尼系数;P表示电机的功率;R表示步进电机的内阻;Kd表示步进电机的反电动势常数;θd表示步进电机的期望转子角度。
控制目标可理解为通过调节输入电流I、控制步进电机的转速,使得电机达到期望的转速θd。需保证控制器的稳定性和健壮性,适应不同电机参数和环境条件。
1.2 基于二阶滑模算法的步进电机自动升降转速控制
结合步进电机数学模型和转速控制目标,在具体执行步进电机自动升降转速控制阶段引入二阶滑模算法。借助二阶滑模控制器,实现对步进电机自动升降转速的精准控制。
首先,定义二阶滑模控制器的滑模面为
式中:s表示二阶滑模控制器的滑模面函数;λ表示滑模面的增益系数;ωd表示步进电机自动升降转速控制阶段的期望角速度。
其次,设置二阶滑模控制器的滑模控制律为
式中:u表示二阶滑模控制器的滑模控制律函数;Ks表示滑模控制的增益系数。
最后,结合构建的步进电机数学模型和二阶滑模控制器的控制律,通过求解对应的电流I和控制角度Z之间的匹配关系,就可以得到具体的控制电流和期望的转子角度。
基于二阶滑模控制器的步进电机自动升降转速控制流程具体如图1 所示。结合图1 所示的控制流程,设置二阶滑模控制器的配置包括滑模面、滑模控制律、电流控制器和转速检测器模块。在具体的执行过程中,控制器通过调节输入电流I控制步进电机的转速,实现电机的稳定运行。对应控制器的输入信息包括电机的当前转速、期望转速、电流等状态信息。此外,还需要输入电机的参数(电机常数、负载惯量、阻尼系数等)及控制器的参数(滑模面的增益系数、滑模控制的增益系数等)。控制器的输出信息包括控制电流I和期望的转子角度θd。这些输出信息将用于调节电机的运转状态,确保电机的稳定运行。
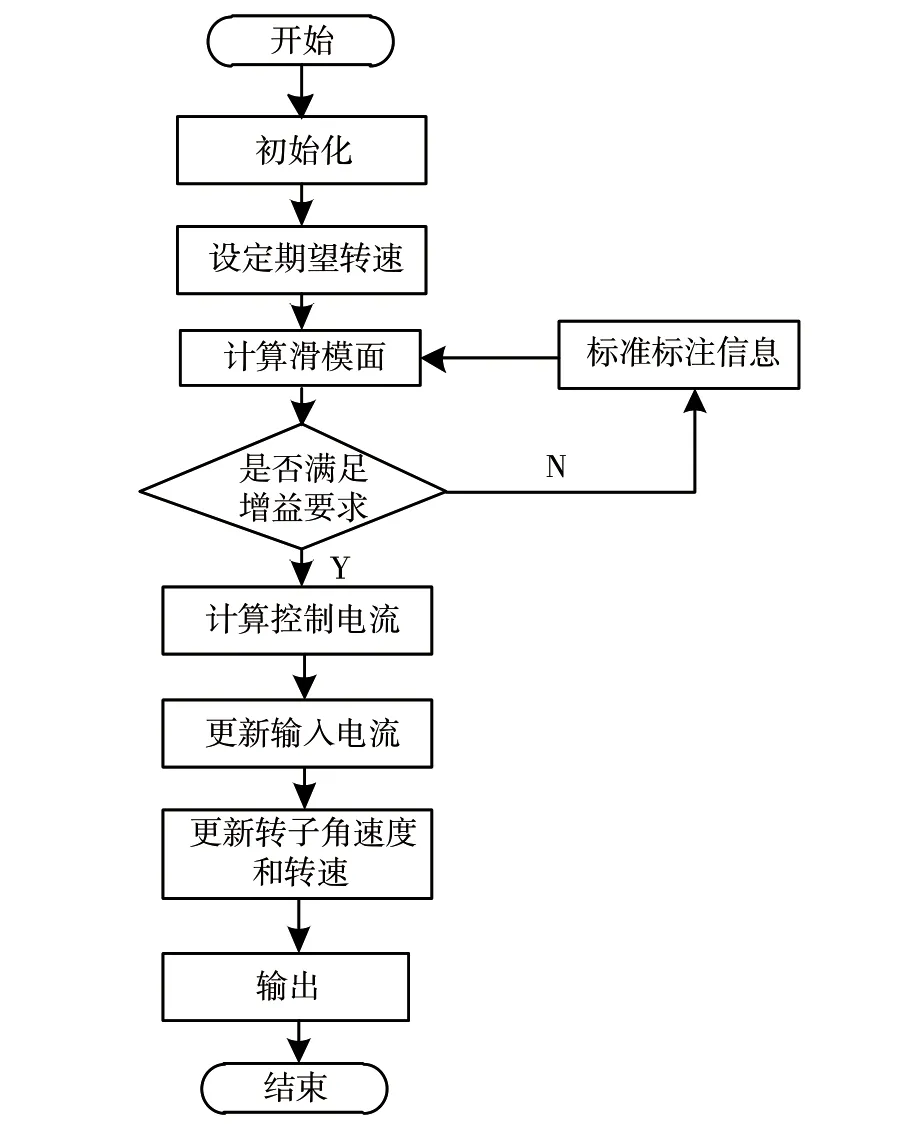
图1 基于二阶滑模控制器的步进电机自动升降转速控制流程
以二阶滑模控制器为基础的步进电机转速控制的具体实现流程如下。步骤1,初始化。在开始控制之前,需要对控制器和电机进行初始化。步骤2,设定期望转速。根据应用需求设定期望转速ωd。步骤3,计算滑模面。根据当前转子角度、期望转速和滑模面的增益系数,利用式(5)计算滑模面。步骤4,调节输入电流。根据当前电流、期望转速、滑模面的增益系数及控制律的增益系数,利用式(1)的步进电机转子的运动方程表达式,根据控制电流和电机的数学模型,调节输入电流以实现控制目标。步骤5,更新转子角度和转速。根据电机的转动方程和电磁力矩方程,更新转子角度和转速。步骤6,调整控制器参数。根据实际转速和期望转速,调整滑模面的增益系数和滑模控制的增益系数,有效控制性能。
按照设计的控制流程,循环执行步骤3~6,直到达到控制目标或终止条件。需注意,在实际应用中,控制流程可能会受到其他因素的影响,如电机参数的变化、负载的变化等。因此,需要根据实际情况优化和调整控制器,以保证控制器的稳定性和健壮性。
2 测试与分析
2.1 测试环境
在对基于二阶滑模算法的步进电机自动升降转速控制方法进行性能分析时,以某实际的步进电机为基础,开展对比测试。测试步进电机主要由定子、转子、轴承以及端盖等部件组成。定子上通常有多个凸极,转子上的每个凸极上都绕有线圈。当给线圈通电时,磁场会发生变化,从而吸引转子旋转。通过控制器对测试步进电机的运行状态进行控制。控制器接收脉冲信号,然后将这些信号分配给步进电机上的线圈,使其按一定的顺序和强度进行通电,从而使电机旋转一定的角度。在具体的运行逻辑上,测试步进电机的运行逻辑基于脉冲信号的数量和频率。测试步进电机的具体运行参数信息如表1 所示。
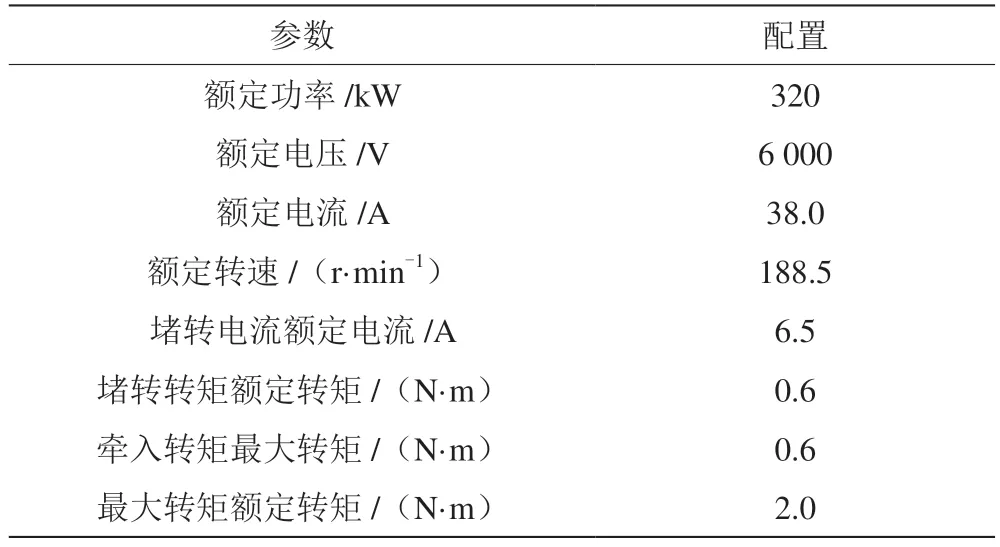
表1 测试步进电机具体运行参数信息
在测试环境的基础上,分别设置文献[6]提出的以动态规划为基础的步进电机控制方法,以及文献[7]提出的以主动式阻尼为基础的步进电机控制方法作为对照组。通过对比分析不同控制方法下的转速发展情况,对其具体的控制效果做出客观评价。
2.2 测试结果与分析
对于具体的控制测试,设置具体的控制任务为转速由80 r·min-1提升至100 r·min-1。3 种不同方法的控制效果如图2 所示。
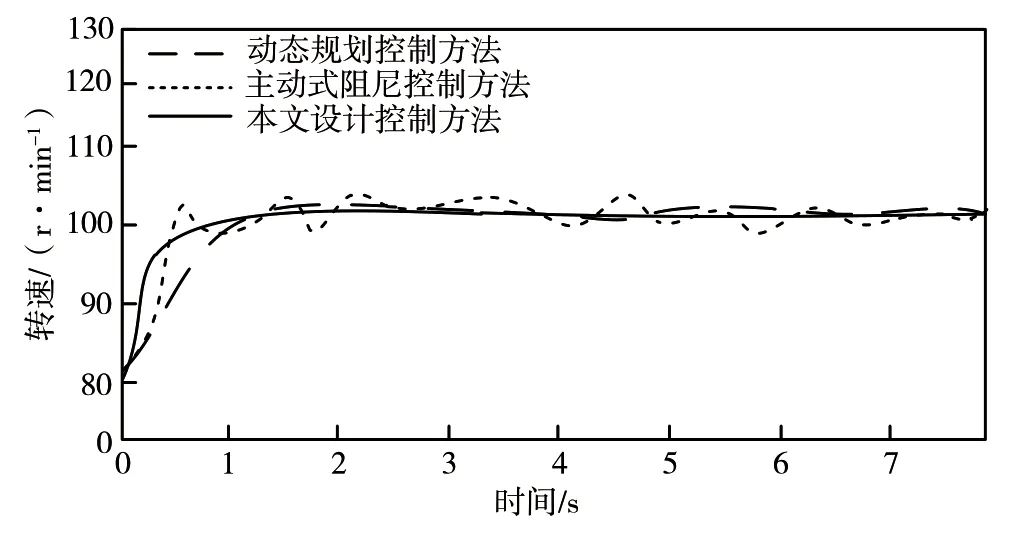
图2 不同方法控制效果对比图
由图2 可知,在3 种不同方法的测试结果中,对于测试步进电机的转速控制效果表现出明显的差异。在以动态规划为基础的步进电机控制方法下,控制效果较为平稳,但是具体的时间开销较大,转速由80 r·min-1提升至100 r·min-1的过程中,总耗时达到1.35 s。在以主动式阻尼为基础的步进电机控制方法下,虽然控制效率明显提高,但是控制效果的稳定性相对偏低,在测试步进电机转速达到目标值100 r·min-1后,出现了不同程度的上下浮动,其中最大波动程度达到4.0 r·min-1。相比之下,在设计的步进电机控制方法下,不仅达到了在短时间内迅速调整测试步进电机转速的目的,并且转速表现出较高的稳定性。转速由80 r·min-1提升至100 r·min-1的过程中,时间开销仅为0.85 s,比以动态规划为基础的步进电机控制方法少0.50 s,比以主动式阻尼为基础的步进电机控制方法少0.10 s。综合测试结果可以得出,基于二阶滑模算法的步进电机自动升降转速控制方法可以有效控制进电机转速,能够满足实际的应用需求。
3 结语
为了实现对步进电机转速的有效控制,提出基于二阶滑模算法的步进电机自动升降转速控制方法研究,借助二阶滑模控制器具有快速的响应能力,实现了对步进电机转速的快速控制。这使得设计的控制方法在需要快速响应的应用场景中具有较好的适用性。借助二阶滑模控制器对电机参数的变化具有一定的健壮性,也使得设计的控制方法可以在一定程度上适应不同电机型号和应用场景。通过对二阶滑模控制器滑模面进行针对性设计,实现了对步进电机转速的高精度控制。在之后的研究中,可以进一步考虑负载变化对步进电机转速的影响。例如,可以通过设计自适应控制策略,以实现对不同负载条件下的步进电机转速的稳定控制。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
应用数学(2020年2期)2020-06-24
电子制作(2019年19期)2019-11-23
中国惯性技术学报(2019年6期)2019-03-04
数学物理学报(2018年6期)2019-01-28
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电子制作(2018年19期)2018-11-14
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
