
多功能家禽散养巡检车模型的行走、捡拾模块设计与应用
2024-04-10 11:40冷春蔚朱子仪马绍朔
现代制造技术与装备 2024年2期
冷春蔚 朱子仪 马绍朔
(商丘师范学院,商丘 476000)
党的十九大报告中提出乡村振兴战略,国务院办公厅出台的《关于促进畜牧业高质量发展的意见》,明确提出加强为中小养殖户提供机械化生产、产品储运等实用科技服务。我国家禽养殖业正处于生态健康养殖阶段,但同时存在着养殖观念落后、智能养殖技术欠缺、家禽防疫及环境污染等问题[1-3]。
家禽饲养中,散养模式能为家禽提供广阔的活动空间。然而,对于一个规模化中大型农场来说,自由散养模式需要进行大量的工作,如定时喂养、家禽生命体征预警和禽蛋捡拾。机械化和智能化的开发设备可以解决劳动力短缺、饲料供应不足、禽蛋拾取与挑拣费时以及人类和鸟类安全等问题。
利用散养模式过程中,从科学、安全和高效家禽饲养需求出发,开发出具备全地形适应、环境预警和禽蛋捡拾功能的智能巡检设备,将是解决劳动力不足、饲养安全水平不高、无法适应生产需要等问题的关键所在。
针对这种情况,设计并研制了多功能家禽散养巡检车,着重研究行走、捡拾模块,为散养家禽养殖业的高质量发展提供技术和装备支撑,促进家禽养殖向智能化和自动化方向发展[4-5]。
1 多功能家禽散养巡检车硬件设计
多功能家禽散养巡检车系统结构包括巡检车(硬件)和开发控制(软件)两部分,如图1 所示。
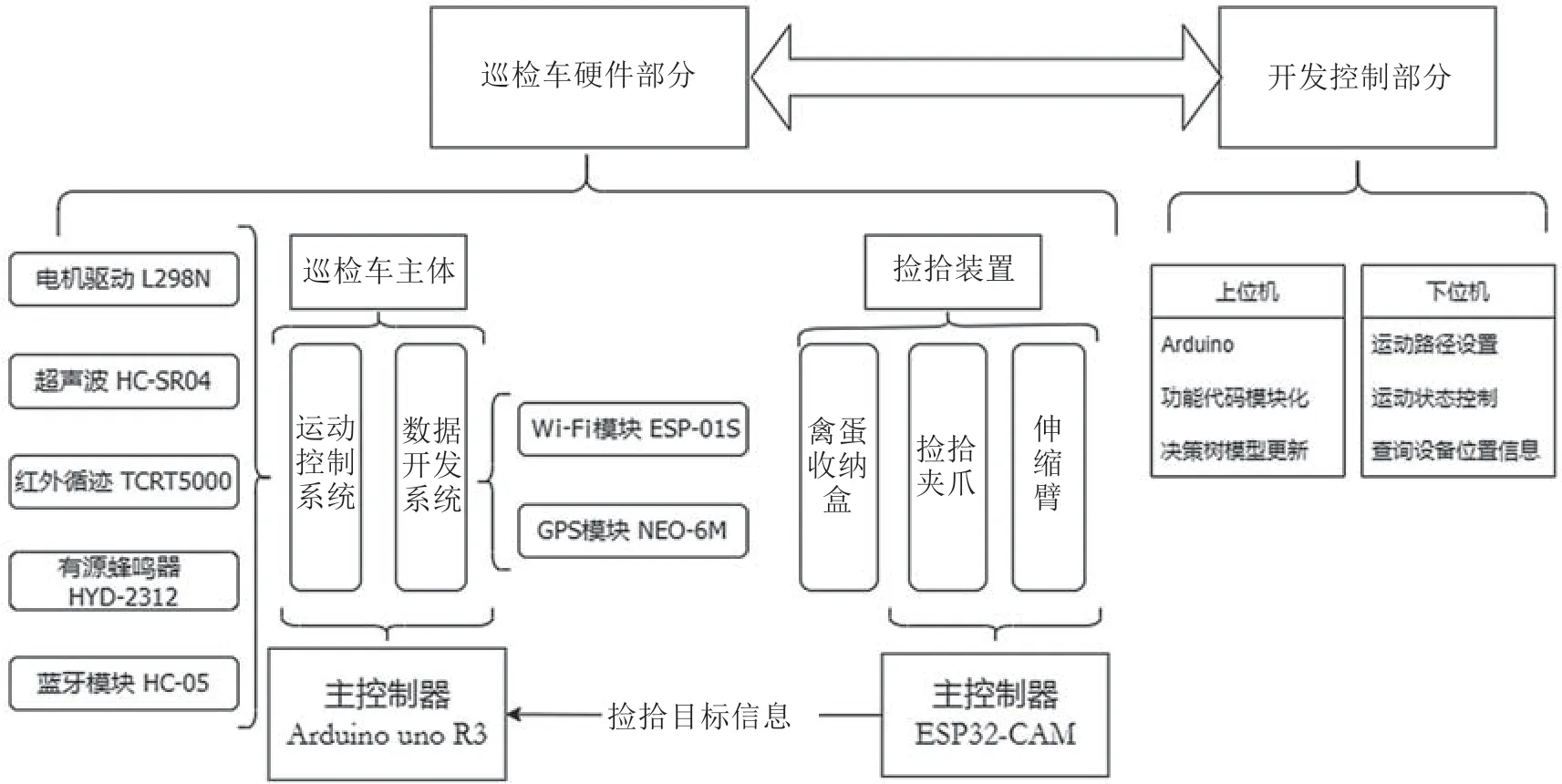
图1 巡检车系统结构
巡检车主体由运动控制系统、数据收发系统两部分组成。运动控制系统由电机驱动及控制模块、超声波避障模块、红外循迹模块、有源蜂鸣器报警模块及蓝牙模块等组成。超声波传感器和红外传感器主要基于当前的运动状态和障碍物的位置,对如何避开障碍物做出一般性决定。在运动控制系统接收来自终端的蓝牙信号后,通过直流电机驱动的行驶部分响应命令绕过障碍物。同时,红外循迹模块可以确保巡检车在指定范围内巡逻。
信息采集系统与收发系统由Wi-Fi 模块连接,主控制器收到工作指令后预检车辆状态,通过内置全球定位系统(Global Positioning System,GPS)可查询巡检车的当前位置信息,在终端同步其状态信息。为了提升决策的准确性,决策模型会定期动态更新,数据模型会将来自多个传感器的数据集成至实际运行过程中,以实现自动决策并执行其他任务。选定的传感器数据将实时上传到数据服务器,以重新编程解决方案模型,并实现持续的更新和重复。
捡拾装置由适用于禽蛋的三段式平行捡拾器和智能伸缩臂组成,当主控制器判断夹持目标禽蛋捡拾成功后,伸缩臂将禽蛋收入巡检车的收纳盒。视觉设备由OV2640 模块组成的双目摄像头及高清摄像头构成,分别实现的禽蛋识别与完好度检测及实时行驶状况的监控传输。
本系统采用双微控制单元(Microcontroller Unit,MCU)设计,巡检车主体以ARDUINO UNO R3 作为主控制板,捡拾装置以ESP32-CAM 作为主控制板。
2 巡检车行走模块
2.1 麦轮设计分析
巡检车行走模块采用4 个麦克纳姆轮驱动的方式实现对小车的全方向运动控制。巡检车行走模块包含互为镜像的2 个左旋轮(A 轮)和2 个右旋轮(B 轮),左旋轮和右旋轮呈手性对称。设巡检车整体前进时的主轮转向为正,电机正转;后退时主轮转向为负,电机反转。在电机正转时,A 轮受摩擦力作用向右前方运动,而电机反转时具有向左后方运动的趋势。A 轮和B 轮的力矩分解如图2 所示。
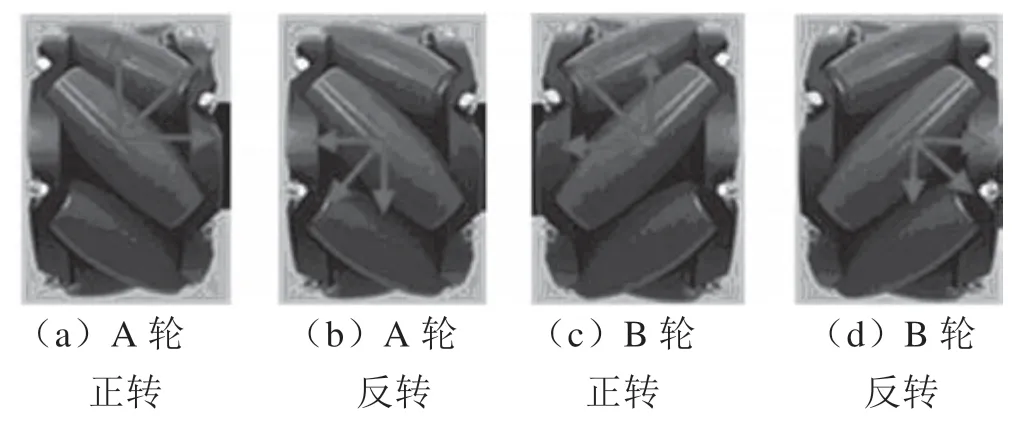
图2 麦克纳姆轮力矩分解示意图
以车体底部几何中心为原点拟建立平面直角坐标系,如图3 所示。巡检车的移动方向可分解为X、Y两个方向。ω为车体绕原点自转的角速度,L1为底盘几何中心到轮轴中心的水平距离,L2为底盘几何中心到轮轴中心的垂直距离,μ为巡检车移动时辊子的分力方向。设麦克纳姆轮的轮毂轴与辊子转轴的夹角为α,即45°。
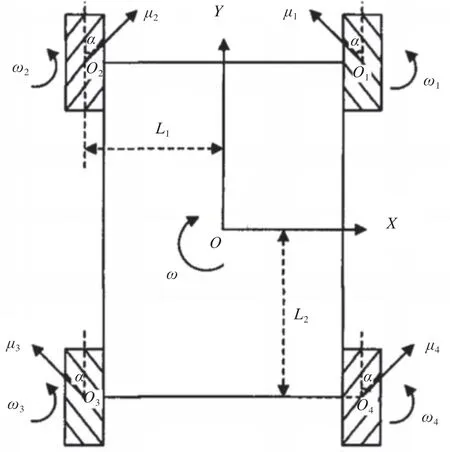
图3 巡检车底盘综合受力分析
2.2 行走模块驱动装置
采用4 台12 V 直流减速TT 马达提供动力支持,电机减速比为2.5、轴长约为60 mm、额定调速范围为150~900 r·min-1、额定输出功率为25W,通过脉冲宽度调制(Pulse Width Modulation,PWM)电机调速实现各直流无刷电机正转、反转、急停和加速等动作。本设计选用的麦轮外径约4.6 cm,沿轴旋转一周可使车主体沿指定方向前进约29 cm,选用的直流减速TT 马达,在12 V 额定电压下,转速可稳定达到13 r·s-1,在减速比为2.5 的齿轮组作用下,输出约5 r·s-1。该驱动装置可支持工作行驶最高速率约为145 cm·s-1。
3 电机驱动
电机驱动芯片采用L298N,其输出端接至直流减速电机,该芯片检测外部电阻并反馈控制电路。L298N 通过控制主控芯片上的输入/ 输出(Input/Output,I/O)端,直接通过电源调节输出电压,即可实现电机的正转、反转、停止,系统采用PWM 的方法,通过改变平均电压值调整电机转速。
3.1 蓝牙收发模块
选用的HC-05 蓝牙模块经杜邦线与MCU 的I/O口相连。电机驱动器在收到MCU 经由HC-05 发出的蓝牙信号时,电机便会做出相应的动作。
3.2 超声波避障装置
超声波避障装置选用HC-SR04 超声波测距模块。HC-SR04 超声波距离传感器配备2 组传感器,发射器的部分可将MCU 引脚发出的电信号转换为40 kHz超声波脉冲信号。接收器部分负责将监听到的脉冲转换为输出脉冲信号,其信号宽度的作用在于确定脉冲传播的距离。该模块体积小,易于安装使用,并提供2~400 cm 非接触范围,不动测量角度最大15°,精度可达3 mm。
实际配置中,将超声传感器安装于MG995 伺服电机上,二者整体安装在二自由度云台上,实现超声传感器水平方向的180°旋转,竖直方向的90°旋转。
3.3 红外循迹模块
红外循迹模块选用的TCRT5000 由一个发射管和一个接收管组成,当发射管的信号经反射被接收管接收后,接收端电阻发生变化,在电路上一般以电压的变化形式体现,再经模数转换器(Analog to Digital Converter,ADC)转换或LM324 等电路整形后得到处理后的输出结果。电阻的变化取决于接收管所接收的红外信号强度,受反射面颜色和反射面到接收管距离两方面影响,实际测试中检测反射距离为1~250 mm。该装置使用比较器输出,信号干净,驱动能力强,同时配有多圈可调精密电位器调节灵敏度。
3.4 捡拾装置设计
抓取对象的结构和形态对于末端夹持器的机械结构设计很重要,研究选择中原地区较为常见卢氏鸡的鸡蛋作为测量对象。卢氏鸡一般年均产蛋量在110~150 枚。随机选择9 个相近的该品种鸡蛋,测量尺寸和质量、密度等相关数据,结果如表1 所示。
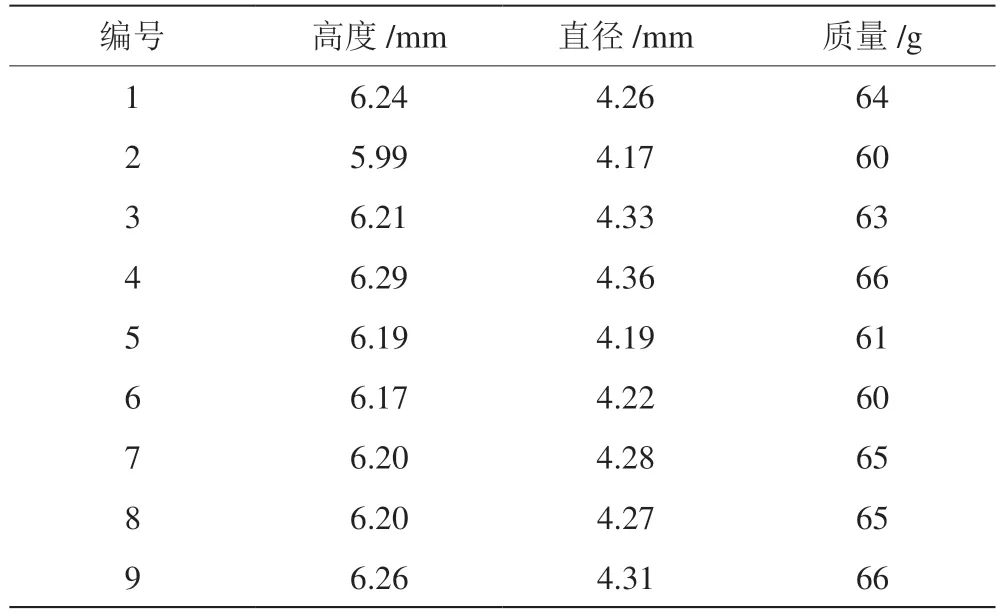
表1 鸡蛋相关数据
鸡蛋为非对称的椭球体结构,通过测量可以看出鸡蛋的质量一般在65 g 左右,直径约4.25 cm,高度约6.22 cm。根据这些数据可以合理地对末端夹持器进行结构设计和参数设定,其中拾取装置的臂长将超过50 cm。
由于蛋壳易碎且易出现内部损伤,经过优化的末端夹指应具有一定的保护软体功能。选用的两指节型末端夹持器可以更牢固地抓取鸡蛋这类椭球体的对象,具有控制难度小、成本低等优点,在此基础上对末端夹持器机械结构与抓取功能的实现进行3 个方面的改进。第一,在两侧的主夹指上下各增加3 只夹指,一列呈4 只非水平排列的夹指,如图4 所示。第二,末端夹持器的夹指分别在与鸡蛋最宽处的接触弧面上设计基于鸡蛋上料前表面凹凸纹理的仿生纹路,增加夹爪与鸡蛋的摩擦,更加贴合鸡蛋表面,防止夹爪在抓取或者搬运鸡蛋过程中出现掉落或破碎等情况。第三,在开合35°时的啮齿处增加约2 mm 的空隙,在保证夹爪力度的同时,使夹爪具有调整的空间。
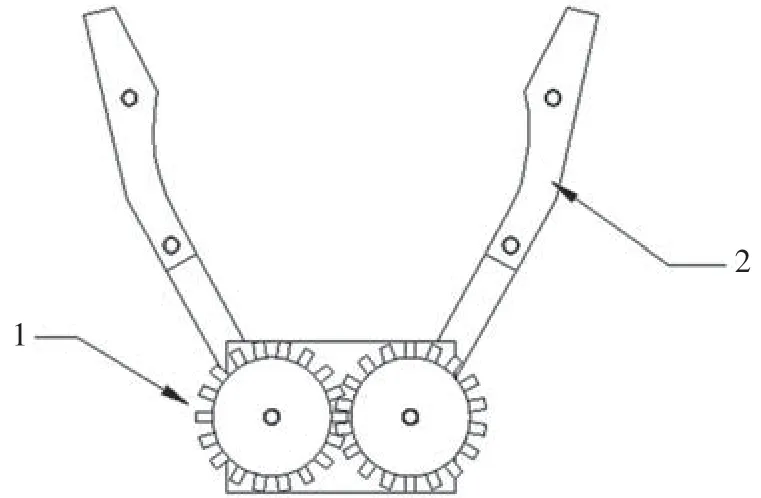
图4 夹持器俯视图
4 系统软件设计
原型机在实际开发中采用了模块化编程,即建立主函数、子函数、子过程等框架,并仔细定义和调试每个框架的输入和输出链接关系。
考虑后期维护等,上位机开发选用Arduino 平台。Arduino 平台具有以下特点:软件模块化设计完善,用C++将硬件抽象成类库;多显示器和灵活的窗口管理系统;代码编辑器功能齐全,可以任意配置用户喜爱的形式;强大的编译工具,并且提供在线仿真和调试功能。其采用C++进行程序编写,可读性强,且具开源特性。
5 避障功能设计
本设计建立了巡检车蓝牙互联及避障的系列流程,如图5 所示。
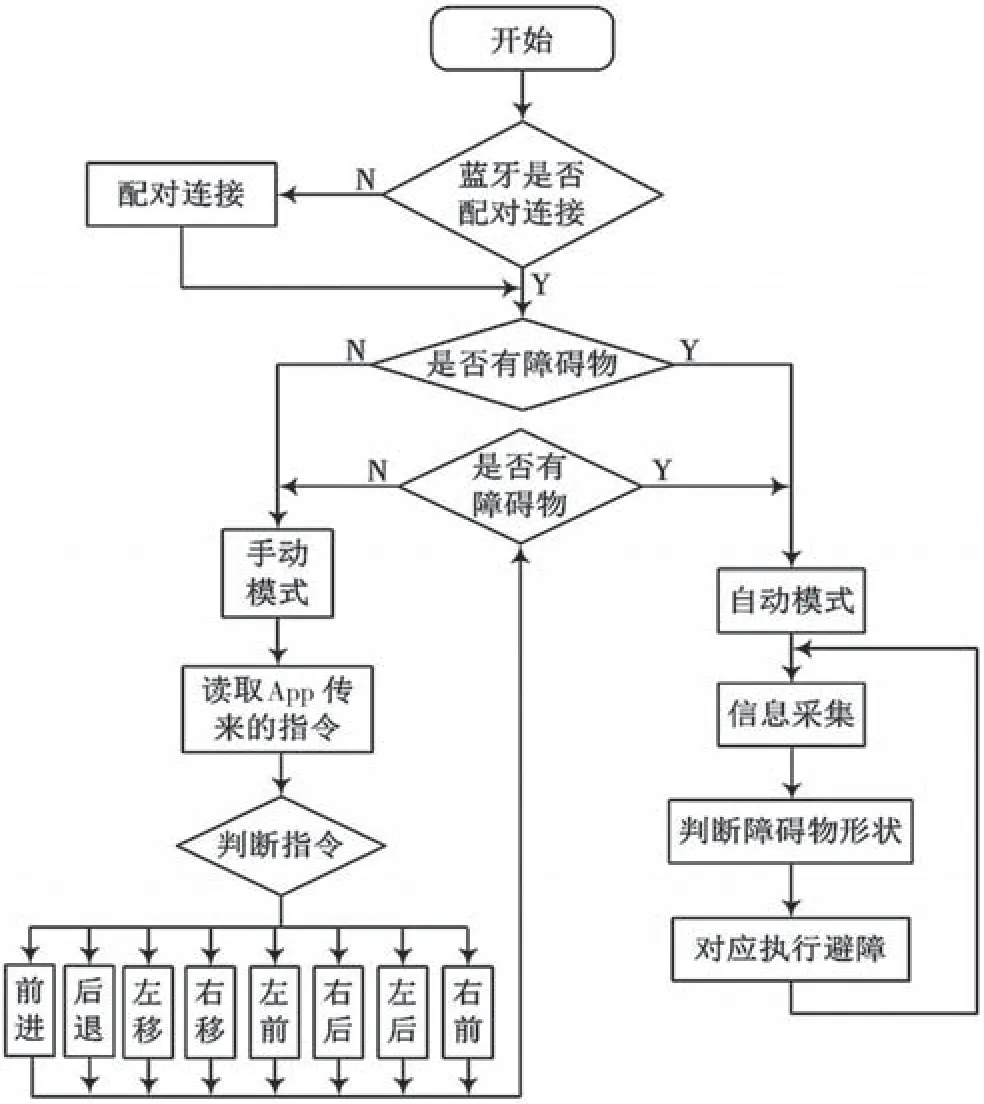
图5 蓝牙连接及避障流程图
小车在自动避障过程中采用传感器采集信息。对于传感器采集的数据,小车要判定在一个数值范围内是否有障碍物,即需要确定一个安全距离。由于巡检车采用四驱麦克纳姆轮设计,无须转弯即可转变运动方向,综合代码延时及实物验证最终将安全距离设定为17.43 cm。
超声波测距模块的安全距离设定是基于其测定的距离,然后通过编程实现。四周分布2 个红外测距(避障)模块的安全距离,使用电位器手动调节旋钮即可设定,在安全距离内检测到障碍物返回字符“0”,否则返回字符“1”。
6 示例分析
选用长为15 m、宽为2 m 的长方形散养区域(如图6 所示)投放巡检车,巡检车抓取范围为以自身为圆心、半径为0.5 m 的区域,车沿预设路径(虚线)前行,即可全覆盖捡拾散养区禽蛋。
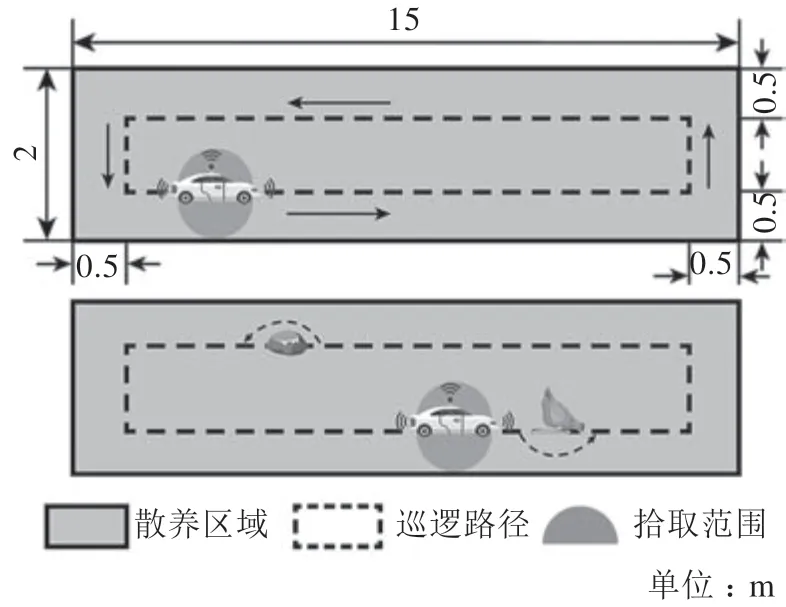
图6 巡检车路径规划示意图
本示例提供了3 种散养区随机位置的禽蛋、石块和鸡的投放方案,见表2。方案1 为基本对照组;方案2 在方案1 基础上增加了石块投放数量,以检测巡检车对障碍物的感应及躲避性能;方案3 在方案1 基础上增加了禽蛋投放数量,进一步测试巡检车的捡拾速率及捡拾装置使用耐久性。每个方案的测试周期设定为车沿预设路径绕场2 周,所得测试数据如表3 所示。其中,漏检率的计算公式为

表2 方案设计

表3 测试结果
式中:N投为禽蛋投放数;N捡为禽蛋捡拾数。
捡拾成功率的计算公式为
式中:N石为捡拾石头数量;N损为破损禽蛋数量。
结果显示,方案2 中因石块增多,巡检车行驶路程较方案1 增加了4.17 m,但平均行驶速率仅降低了6.5%,表明巡检车能够快速检测到行进过程中的障碍物并及时躲避。方案3 中行驶时长较方案1 增加了57.83 s,这是由于禽蛋投放数量增加了50 枚,导致捡拾时间增加,但漏捡率仅上升3%。综合结果显示,3 种测试方案的平均漏捡率低于7.7%。巡检车工况下行驶速率为36.55 cm·s-1,表明所提出的巡检车在执行实地禽蛋捡拾任务时具备稳定的性能和较高完成度。
7 结语
本巡检车为国内禽类散养模式提供了一种新的方式,初步试验表明,其工作过程可靠、稳定,可以成为家禽散养的智能化装备,将进一步试制初代产品,投入实际散养环境进行测试。
猜你喜欢
今日农业(2021年16期)2021-11-26
湖南饲料(2021年4期)2021-10-13
中国测试(2021年4期)2021-07-16
今日农业(2021年2期)2021-03-19
湖南饲料(2019年5期)2019-10-15
新农业(2018年6期)2018-04-18
小天使·一年级语数英综合(2017年5期)2017-06-10
数学小灵通·3-4年级(2017年5期)2017-06-05
新农业(2016年15期)2016-08-16
少儿科学周刊·少年版(2015年11期)2015-12-17
