
机器人系统的故障检测与诊断研究
2024-04-10 11:40张丽娟
现代制造技术与装备 2024年2期
张丽娟
(石家庄科技职业学院,石家庄 050000)
随着机器人的重要性不断提高,其在日常生活中的应用越来越广泛[1]。然而,这些复杂、昂贵的机器系统容易出现各种故障,如磨损、噪声、控制故障等[2]。故障的检测与准确诊断对于确保机器人系统的稳健性和可靠性尤为关键。解决机器人系统故障问题,需要深入了解新兴应用场景,而且研究方法要很好地应对复杂故障带来的挑战。
机器人系统的工作涵盖3 个主要过程,即感知、思考和行动。机器人通过传感器感知外部环境,再利用算法综合感知信息进行思考,最终执行决策。在这个复杂的运行过程中,机器人容易出现不同类型的故障。机器人系统的故障分为硬件故障、软件故障和交互故障,如图1 所示。硬件故障可能发生在机器人系统的任何物理组件上,影响机器人的信息反馈和指令执行能力。软件故障涉及算法错误或正确算法的错误执行,影响机器人的认知行为,即感知、决策和行为执行[3]。交互故障可能是机器人内部故障的结果,也可能由外部事件引起。
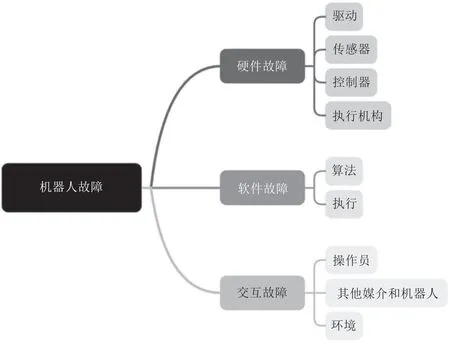
图1 机器人系统故障分类
为全面了解机器人系统的多样性,研究了机器人系统的不同特征。这些特征对故障检测与诊断方法的选择具有重要影响。先分析不同的故障检测与诊断方法,再针对机器人系统的不同约束和要求选择合适的故障检测与诊断方法。
1 机器人系统不同特征下的故障检测与诊断
机器人系统作为一个综合性系统,融合了多个学科的技术。在多种特征相互结合的背景下,传统机器人故障检测与诊断方法面临着新的挑战。表1 总结了机器人系统的主要特征,以及每个特征给故障检测与诊断带来的挑战,同时提出了对应的解决方法。

表1 机器人系统主要特征
1.1 依赖外部传感器
虽然增加专门的传感器能够实现机器人的故障检测,但是会提高系统成本。许多机器人未配备故障诊断传感器,需依赖现有的传感器,将给故障检测诊断带来巨大挑战。
传感器故障可能导致机器人系统出现错误行为。为检测传感器故障,需将传感器读数与预定义期望值或预测值比较。若无外部感知源(如操作员或其他机器人)作为辅助,则故障诊断会更加困难。
传感器融合技术采用数据驱动的方法,当多个传感器感知环境的不同方面时,可以将它们的数据融合。如果传感器读数与融合后的结果不一致,说明机器人系统可能存在故障。基于传感器融合的故障检测方法对机器人系统至关重要。
1.2 自主控制
机器人系统可以是由人操控的,也可以是高度自主的。对于高度自主的机器人,面临的挑战有3 点:第一,如何在只使用自身传感器,缺乏外部比较的情况下诊断故障;第二,需要快速在线检测故障,即使存在故障,机器人仍要继续自主运行;第三,自主机器人对远程支持系统的依赖较少,故障诊断需在机器人本体上进行。
解决上述挑战的方法之一是基于模型的方法。诊断依赖于正常系统行为和已知故障的显式先验模型。行为模型通过解析方程或逻辑公式来描述系统正常行为,可快速产生对机器人行为的期望。如果观察到的行为与预期行为不一致,则怀疑是由故障引起的。
另一种方法是利用机器学习生成故障检测与诊断模型,这种方法可在线使用,通过离线学习减少在线计算负荷[4]。然而,通过离线学习生成的静态模型可能不适用于检测新产生的故障。
1.3 与环境的交互
机器人会与物体、机器人和人类进行交互。这些交互带有高度不确定性和未知故障,在交互过程中,故障检测诊断的挑战在于检测未知故障。
早期研究认为群体机器人具有容错性,但近期研究表明故障机器人显著影响健康机器人,导致任务失败。一台机器人的故障可能会在相邻机器人中传播,形成群体级联效应。群体系统中的故障分为两类,拓扑故障和组件故障。拓扑故障会改变群拓扑,而组件故障仅影响单个机器人的执行器、传感器和控制器。基于模型的故障诊断方法可通过建立数学模型来描述机器人系统的物理特性,检测和诊断潜在故障,模型包括运动学、动力学和传感器模型等。
2 不同的故障诊断方法
表2 为故障检测与诊断方法在机器人系统中的优势和面临的挑战。从表2 可以看到,每种方法都有一定的缺陷,而构建一个结合这些方法的混合方法可以克服相应挑战。

表2 不同故障检测与诊断方法在机器人系统中的优势与挑战
2.1 数据驱动的方法
数据驱动的方法从采样数据中提取有用信息,从而实现故障检测与诊断。一些数据驱动的方法将在线数据与已知的故障表达式或曾经观察到的正常行为进行比较。统计匹配的小偏差将在线数据归类为正常数据,异常值大偏差被归类为异常或未知故障[5]。
其他数据驱动的方法如机器学习法,从数据中选择或提取信息特征,通过学习来生成故障检测或诊断模型。生成的模型能分类数据,特别是对机器人实时产生的在线数据进行分类,判断数据是否表示故障,甚至将其与诊断关联起来。
所有由数据驱动的方法都十分依赖于数据质量。机器学习中有无监督方法取决于训练数据中是否存在足够的例子。在可能发生未知故障的机器人领域,无监督方法更为合适,但对于已知的故障检测,无监督方法通常不如监督方法准确。
2.2 基于模型的方法
基于模型的方法完全依赖于关于系统的先验知识。诊断过程依赖于正常系统行为或其已知故障的显式模型[6]。观察到的机器人行为动作和模型产生的预期不一致,可能是由故障引起的。
基于模型的诊断方法的主要缺点是构建分析模型的成本较高,尤其是在机器人领域,因为模型构建需考虑机器人的动态环境、任务和复杂性。结构模型描述了组件之间的依赖关系,相较于行为模型更易构建。然而,结构模型通常不能完成故障检测任务,由于无法推断预期行为,进而无法与观察到的行为进行比较。但是在诊断过程中,结构模型因其能够较为清晰地描述相互依赖关系,故而允许诊断故障后查找故障的根本原因。一些基于模型的诊断方法使用故障模型,描述已知故障行为,但仅依赖于故障模型的方法无法检测未知故障。
2.3 基于知识的方法
基于知识的方法模仿人类专家,利用领域专家的知识与经验检测机器人系统故障。这种方法的优势在于结合基于模型和数据驱动的方法。基于知识的方法可分为因果分析和专家系统两类。
因果分析方法通过分析因果关系推断系统可能存在的故障。领域专家建立系统因果模型,描述组件之间的关系和故障对系统的影响。通过因果推理识别可能的关系链,采用规则引擎、逻辑推理等技术逐步排除不合理假设,确定最可能导致系统行为的故障原因。该方法适用于复杂系统,其故障可能以非直观的方式影响整体性能。
专家系统模仿人类专家的推理过程,获取的知识需要以计算机能够理解和处理的形式进行表示,如if-then 规则、框架、产生式规则等。这些规则描述了特定情境下针对某些观察到的现象应采取的行动或推断,可以从第一性原理或机器人系统的结构描述中找到。专家系统包含一个推理引擎,用于执行基于知识库中规则的推理。当系统观测到机器人行为或系统状态时,推理引擎根据知识库中的规则来推断可能的故障原因。专家系统的主要缺点是不能处理未知故障,在从固定的专家规则中推断出新的诊断结果方面具有挑战性。
3 结语
文章研究了机器人系统的故障检测与诊断方法,这些方法适用于机器人系统的不同特征。详细阐述了这些方法的优势和面临的挑战,分析了每种方法对于机器人系统的优缺点。期望通过以上分析,为机器人的故障检测与诊断提供参考。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
少年博览·小学低年级(2016年10期)2016-11-24
少年博览·小学低年级(2016年9期)2016-11-24
少年博览·小学低年级(2016年5期)2016-05-14
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
