基于ARCTAN 函数的孤岛微电网下垂控制研究
2024-03-29 10:42朱航航李梦达裴光耀孙悦悦
上海电机学院学报 2024年1期
朱航航, 李梦达, 宁 晗, 裴光耀, 孙悦悦
(上海电机学院 电气学院, 上海 201306)
为实现“碳达峰、碳中和”的目标,同时满足现代化社会发展对能源的需求,需要建立一个以新能源发电为主体的新型电力系统,微电网作为充分利用分布式新能源发电的一种高级应用形态而受到广泛关注。在微电网中,新能源产生的电能大多为直流源,而逆变器作为将直流电转化为交流电的关键器件,对微电网运行至关重要。
目前,针对微电网逆变器的控制方式主要有集中控制[1-3]、主从控制[4-6]、下垂控制[7-9]等。下垂控制因具有控制简单、灵活、低成本、可靠性高等特点而广泛应用于逆变器控制中。下垂控制利用频率和电压偏移控制逆变器的输出功率,以满足系统运行需求。但由于逆变器下垂控制采用比例控制,在频率和电压误差之间具有不可调和性。
针对上述问题,已有大量的改进型的下垂控制方案被提出,方法各异。王岳等[10]通过采用PID控制器设计频率补偿器,达到微电网在孤岛运行有功功率发生变化时保持系统频率稳定的目标。吴丽珍等[11]设计了一种控制方案,利用模型预测控制方法稳定微电网的频率,从而提高微电网稳定性。柴秀慧等[12]对下垂控制进行改进,提出并网和离网进行统一控制的策略。余志文等[13]利用分布式通信,提出了一种自适应下垂控制策略解决频率偏差。陈刚等[14]利用分布式优化调度解决方案,提出了一种新型的下垂控制器,以确保微电网频率能够稳定维持在额定值。黄慧等[15]在考虑新能源互补特性的基础上提出复合储能协调控制策略,确保母线电压调节至允许范围。刘尧等[16]提出了一种同步发电机的自适应控制策略,以增强系统频率的动态稳定性。孙亮等[17]对虚拟同步发电机无差调频控制策略进行改进,可实现频率自动调节和输出功率合理分配目标。黎静华等[18]提出一种协同控制的微电网频率稳定性控制策略,达到了抑制系统频率波动的目标。姚建华等[19]提出一种基于强化学习的控制方法,利用多个新能源调节微电网运行在孤岛情况时的频率。于国星等[20]提出一种两层控制结构,实现频率同步控制、频率无差调节的目标。
上述文献对传统下垂控制进行了改进以消除频率偏差,但这些改进方案存在输出功率不均衡及优化目标复杂等问题。为解决以上问题,改进的下垂控制应满足频率稳定的要求,且达到输出功率均衡、无需通信、结构简化的目的。为此,本文引入ARCTAN函数改进传统下垂控制,当微电网发生扰动时,能够抑制频率波动,使频率达到系统要求,以增强微电网运行的稳定性。
1 多台逆变器并联模型分析
为准确分析逆变器并联运行模式,本文以两台逆变器系统并联运行为例进行分析,如图1所示。图中,R1、R2为逆变器到公共点之间的线路电阻;L1、L2为逆变器滤波电感;C1、C2为逆变器滤波电容;Z为两台逆变器的公共负载。设公共负载Z的电压为Uo,逆变器输出电压与负载电压间相角差为δi,则逆变器1输出的电压为E1∠δ1,逆变器2输出的电压为E2∠δ2,两台逆变器的输出电流分别设为Io1和Io2,逆变器输出的有功功率分别表示为P1和P2,输出的无功功率分别表示为Q1和Q2。
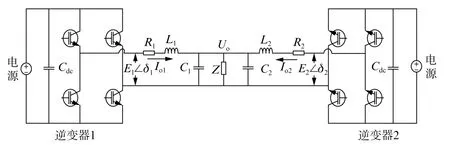
图1 逆变器并联模型
由图1逆变器并联模型电路可得逆变器输出有功和无功功率的表达式为
式中:Xi(i=1,2)为线路电抗和逆变器输出电抗。
2 传统下垂控制分析
传统高压大电网线路呈现感性,分析系统运行时可忽略电阻,同时因相角较小,即sinδ≈δ≈0,因此式(1)可简化为
由式(2)可知,相角δi影响逆变器输出的有功功率,逆变器输出无功功率受到电压幅值Ei影响。由于相角的变化不明显,实际多用角频率ω来表示相角的变化。因此,得到传统下垂控制方程为
式中:ωi、Ei分别为逆变器实际输出的角频率和电压幅值;ω*、E*分别为额定角频率和电压幅值;P*、Q*分别为额定的有功功率和无功功率;mi为逆变器有功功率下垂控制系数;ni为逆变器无功功率下垂控制系数。
在逆变器实际运行过程中,系统出现轻微的波动,即逆变器出力或者负荷需求小幅度波动时,功率与角频率偏移较小,传统的下垂控制能够维持系统的稳定运行。当系统出现较大的波动,即逆变器出力或者负荷需求大幅度变化时,如图2中传统下垂控制曲线所示。此时角频率将由ω1偏移到ω2,偏移量过大将会影响系统的安全稳定运行。
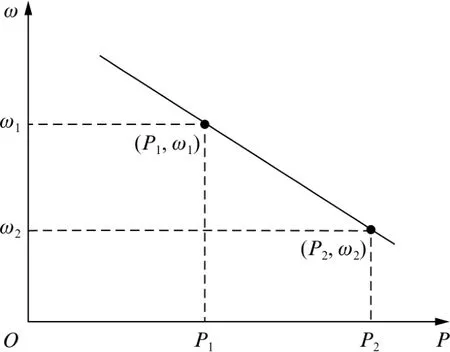
图2 传统下垂控制ω-P 关系曲线
3 改进下垂控制方法
3.1 新型下垂控制方程
在孤岛模式下,当大容量负荷投入或电源停机时,微电网系统在传统下垂控制模块的作用下,系统频率可能会超出限制,并且此状态将持续一段时间,导致微电网系统的电能质量降低,影响系统稳定运行。为减少频率波动,提高系统运行的稳定性,本文将ARCTAN函数引入下垂控制中。图3为ARCTAN形式下垂控制流程。

图3 ARCTAN形式下垂控制流程
首先,将采集的电压、电流进行坐标变换,计算出有功功率P,再进行ARCTAN 变换,得到新的系统频率,改进后的下垂控制方程可表示为
式中:G取值为1,也可以根据系统控制效果进行改变,得到理想的系统响应速度和系统运行稳定性。
ARCTAN形式下垂控制函数关系曲线如图4所示。

图4 ARCTAN形式下垂控制函数关系曲线
在传统下垂控制中,当系统输出有功功率变化或者负载出现较大的波动时,频率偏移较多,频率会由ω1偏移到ω2,超出频率下降的允许范围。改进型下垂控制频率由ω1偏移到ω3足够大时,ω将趋近于ω*,相较于传统下垂控制频率下降量更小。从理论层面分析基于ARCTAN 函数改进下垂控制保证系统频率稳定的原因,将式(4)等号右侧在系统稳定参考运行点(ωref,Pref)进行Taylor展开,展开式为
由式(5)可见,基于ARCTAN 形式下垂控制函数的Taylor展开首项是传统下垂控制函数项。当系统波动导致有功功率波动较小时,Taylor展开式的高次项接近零,控制效果与传统下垂控制效果相似。当系统有功功率波动较大时,函数的高次项发挥作用,稳定系统频率。
ARCTAN形式的下垂控制能够大幅增强频率的稳定性,与传统下垂控制形成鲜明对比。其能够将频率控制在允许波动范围内,以增强微电网运行的稳定性。
3.2 系统稳定性分析
为研究本文控制策略的稳定性,对系统静态工作点附近进行线性化处理,建立逆变器小信号模型进行稳定性分析。逆变器输出的有功功率及无功功率可由式(1)表示,假设系统稳态的工作点为(δ0,E0,U0),可得到相关的小信号方程为
式中:
在下垂控制中,低通滤波器会将计算测量的功率中的高频部分滤除,则有
式中:ωc为低通滤波器的截止频率;Δω(s)=sΔδ(s),s为拉普拉斯算子。
简化式(7)可得系统的特征方程为
其中:
利用根轨迹对系统特征方程的解进行系统分析。图5为当其他控制参数固定时,系统下垂系数变化对应根轨迹分布情况,设定图中箭头方向为系统参数增大的方向。

图5 参数m 变化时系统的根轨迹
随着下垂系数的增加,系统的特征根轨迹表现为往虚轴偏移趋势,对系统的稳定性产生影响。当采用改进下垂控制时,抑制了有功功率变化,可增强系统的稳定性。
4 控制策略仿真
为验证本文提出的ARCTAN 形式下垂控制的有效性,在Matlab/Simulink平台上建立两台逆变器的并联仿真模型,两台逆变器容量设定相同,采用理想的直流电源为逆变器供能,仿真参数如表1所示。为尽可能贴近实际,考虑线路压降,交流侧输出的电压幅值设定为比额定值高5%,即327.55V。为便于观察,由式ω=2πf,将角频率转化为频率。
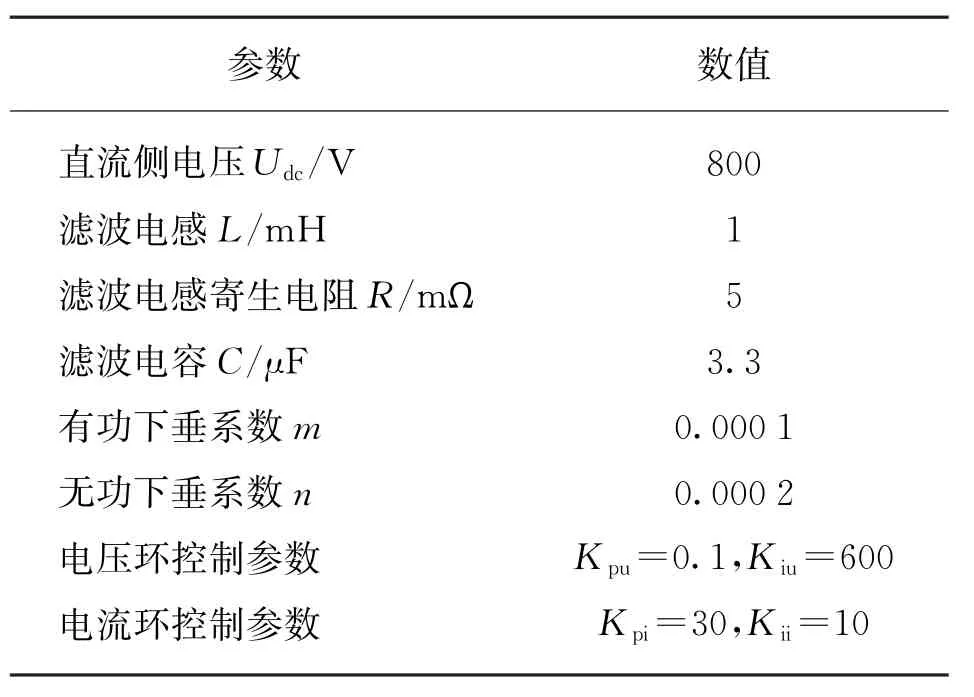
表1 仿真参数
4.1 传统下垂控制仿真分析
两台逆变器同时连接到负载,为负载供电。逆变器控制方式为传统下垂控制,系统仿真时间设置为1s。设定系统频率参考值为50Hz,当t∈[0,0.5)s时,系统投入负载开始运行;当t∈[0.5,1)s时,增大系统负载。仿真结果如图6和图7所示。
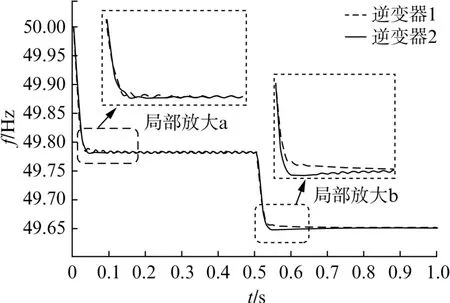
图7 频率变化曲线
由图6可知,在开始仿真后,系统直接带载运行,很快进入稳定状态,稳定时两台逆变器输出有功功率约为5.3kW,实现了功率均匀分配。0.5s时使输出有功功率增加,系统很快进入稳定状态,两台逆变器输出的有功功率约为21kW,达到功率平衡。由图7可知,在0~0.5s内,系统频率由50Hz下降到49.78Hz,0.5s时输出有功功率增加,频率由49.78Hz下降到49.64Hz,超出规定频率偏差±0.2Hz的范围。
4.2 改进下垂控制仿真分析
两台逆变器同时连接到负载,为负载供电。此时控制方式为ARCTAN形式下垂控制,仿真时间同样设置为1s。设定系统频率为50Hz,在t=0.5s增大系统负载,仿真结果如图8和图9所示。
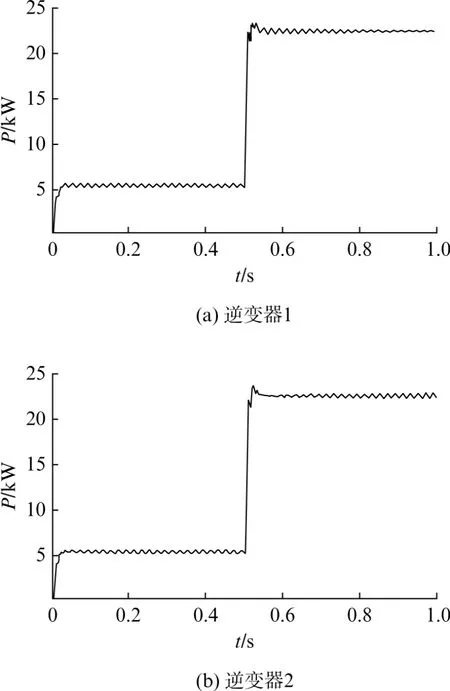
图8 逆变器输出有功功率曲线
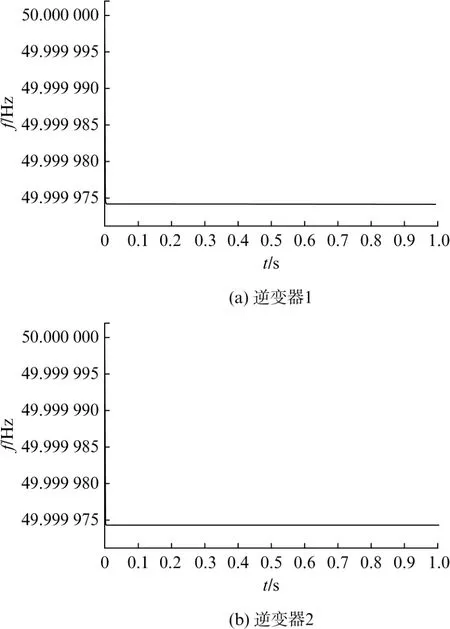
图9 系统频率变化
由图8可知,两台逆变器在0~0.5s之内,输出有功功率逐渐由0增大至约5.3kW,保持稳定;在0.5s增加有功功率的输出后,输出有功功率达到约21kW 后保持稳定。观察频率变化,由图9(a)和图9(b)可知,在整个系统运行时间段内,系统频率保持稳定,为49.99Hz附近。结果表明,本文ARCTAN形式下垂控制方法能够有效抑制系统频率波动,增强系统运行的稳定性。
5 结 语
微电网的系统频率和国家电网运行的频率偏差过大将会影响电网安全以及电能质量。在传统逆变器下垂控制中,存在着输出频率随输出有功功率增加而产生偏移的问题。针对该问题,分析了传统下垂控制存在的问题,提出了ARCTAN 形式下垂控制的概念,并进一步用仿真模型验证。结果表明,运用ARCTAN 形式下垂控制策略,微电网的频率能够保持在国家电网规范的频率内,该控制策略能够改善频率偏移的问题,增强系统稳定性。
猜你喜欢
电力自动化设备(2021年11期)2021-11-20
广东电力(2020年1期)2020-03-03
今日农业(2019年12期)2019-08-13
山东冶金(2019年3期)2019-07-10
文学少年(原创儿童文学)(2019年1期)2019-05-23
中国化肥信息(2019年3期)2019-04-25
物理教学探讨(2018年9期)2018-12-27
消费导刊(2018年10期)2018-08-20
环境保护与循环经济(2017年2期)2017-09-26
魅力中国(2016年50期)2017-08-11