低压微网并联逆变器系统功率均分策略
2024-03-29 10:42:38李梓涵富立友
上海电机学院学报 2024年1期
李梓涵, 富立友
(上海电机学院 商学院, 上海 201306)
化石燃料的使用所产生的温室气体对环境影响严重,迫切需要可再生能源来代替一部分的化石能源[1]。然而,由于可再生能源的波动性、随机性,不能直接作为电源进行供电,需通过逆变器接入微网。但随着用电量的增加,单台逆变器的容量已无法满足需求,需要采用多台逆变器并联的方式进行扩容[2]。
在低压微网中,下垂控制在逆变器并联运行中得到了广泛应用,但由于各线路之间的参数差异,导致传统的下垂控制无法实现功率的合理分配[3]。对此国内外学者展开了大量的研究,大致为两种思路[4]:直接调整下垂控制的参数和利用虚拟阻抗补偿各线路之间的参数差,即间接对下垂控制进行改进。文献[5]提出增大下垂系数可以实现功率的均分,但下垂系数过大会导致公共负载处的电压跌落更严重,对系统的稳定性造成影响。文献[6]提出了对下垂控制的系数实行变步长控制策略,相对与固定下垂系数而言,更加灵活,但对功率分配不均的改善不明显,且系统稳定性差。文献[7]提出引入虚拟阻抗,但参数固定且难以整定的问题,导致功率均分效果差,且会带来母线电压的二次跌落。文献[8]系统的额定电压当中引入一个幅值很小的谐波信号,该信号改变了阻抗角,导致功率因数发生改变,从而调节了系统的功率分配,但该谐波容易被一些控制器放大,使得电压发生畸变。文献[9]采用虚拟复阻抗,通过改进下垂控制环节的比例积分控制器来优化系统功耗,减轻阻抗的不利影响,然而复阻抗值难以确定,且可能对功率的平衡产生负面效果。文献[10]在下垂控制中加入一个阻抗角变量,通过微分环节进行控制,但过多的微分环节对高频噪声敏感,且忽略了对系统的电压和频率的分析。
以上的研究中较少考虑到线路参数未知、负荷波动等不确定因素的影响,且缺乏对系统电压和频率的分析。对此本文采用自适应虚拟阻抗对下垂控制进行改进,在线路参数未知,负荷变化等不确定情形下,实现有功均分,并且加入了电压、频率补偿环节,改善因虚拟阻抗的引入所导致的公共点电压跌落和频率波动,最后在电压电流环中采用SOGI和QPR 控制器代替传统PI控制器来提高系统的跟踪能力。
1 逆变器并联分析
1.1 传统下垂控制
以2台逆变器并联为例,通过戴维南定理,得到并联逆变器的等效模型如图1所示。
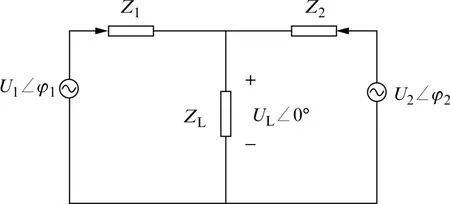
图1 并联逆变器的等效模型
U1、φ1 分别为逆变器的输出电压的幅值和相位;Z1、Z2为线路阻抗,ZL为公共负载阻抗,UL为公共负载电压的幅值。第i个逆变器发出的有功功率Pi和无功功率Qi分别为
低压微网中,线路阻感比大,电抗可以忽略不计,整个线路呈阻性,则阻抗角θi=0,sinθi=0,cosθi=1。且各个逆变器的输出电压相位很小,即sinφi=0,cosφi=1。式(1)、式(2)可化简为
式中:Ri为线路电阻。
由式(3)、式(4)可知,逆变器输出的有功功率取决于逆变器和负载间的电压差,而无功功率由它们的相角差决定。因此可以得到低压微网的逆变器下垂特性的表达式为
式中:U、f、P、Q分别为逆变器实际输出的电压、频率、有功功率和无功功率;Un、fn、Pn、Qn为电压、频率、有功功率和无功功率的额定值;kp、kq为下垂系数。
逆变器下垂控制框图如图2所示,通过采集逆变器输出电压uo(abc)、输出电流io(abc)进行功率计算,再代入到下垂控制中得到电压参考值uref,与采集的电感电流iL(abc)经过电压电流环,得到SPWM 的调制信号Tz,对逆变器的开关管进行驱动[7]。

图2 逆变器下垂控制框图
1.2 有功功率不均分的原因
以2台逆变器为例,各个支路的阻抗分别为:Z1=R1+jX1,Z2=R2+jX2;电阻差和电抗差分别为:ΔR=R1-R2,ΔX=X1-X2。两支路的电压降落分别为
式中:dU1、dU2均为电压降落;ΔU1、ΔU2均为电压降落的纵分量。
将电阻差和电抗差代入到式(7),得
根据图1,列写基尔霍夫电压方程组,即
该方程组通过作差得到dU1-dU2=U1-U2,再利用有功下垂特性表达式可得
利用式(9)减去式(8),再联立式(11),得到
在低压微网中,当系统处于稳定时,逆变器有相同的工作频率,在下垂控制的作用下,无功功率能够实现均分,则式(12)可化简为
由式(13)可见当并联逆变器各支路存在阻抗差时,会导致电压降落差的出现。若公共负载上的额定电压不变,电压降落大的支路,对应逆变器输出的有功功率小,导致有功出力不均且与之并联的逆变器会对其进行补偿,进而形成环流,造成能量的损耗[8]。
2 自适应虚拟阻抗的引入
2.1 定值虚拟阻抗
多逆变器并联时,采用常规的下垂控制策略,由于各个线路存在阻抗差,是无法实现功率的均分。通常会采用加入虚拟阻抗的方法来消除线路阻抗差,在下垂控制环节与电压电流环控制环节之间添加一个虚拟阻抗,可以起到减小或补偿线路阻抗的作用,从而减小各个线路之间的阻抗差。加入虚拟阻抗后系统的控制框图如图3所示。虚拟阻抗的引入,其本质是初始参考电压uref(dq)减去虚拟阻抗(Rv+jωLv)上面的压降io(dq)(Rv+jωLv),得到新的参考电压u*ref(dq)作为电压电流环的输入。

图3 虚拟阻抗的控制框图
2.2 自适应虚拟阻抗
但在实际应用中,由于各个逆变器所在线路的导线长度,分裂次数,对地高度不同以及线路上的负载不同,导致线路的等效阻抗难以确定。因此无法确定虚拟阻抗值的大小。为了使得虚拟阻抗能够根据线路等效阻抗的变化自行调整其大小,需要给它引入自适应的调节特性。
在电力系统中,电阻消耗有功,电抗消耗无功。由此可见,阻抗的大小与功率相关。将有功功率进行均值耦合,再经过PID控制器的调节,虚拟阻抗的整定可实现自适应调节[11]。则
式中:Rv为虚拟电阻,Kp、Ki、Kd分别为PID 控制器的比例、积分、微分系数,Pi为第i台逆变器的有功功率、Pav为有功的平均值。
在低压微网中,当逆变器1输出的有功功率P1大于逆变器2输出的有功功率P2时,则P1一定大于两者的平均功率Pav,P2也一定会小于Pav。由式(14)可知,P1与Pav的差值为正值,通过PID 调节的虚拟电阻值也为正值,会使得逆变器1的线路阻抗增大,同理可知逆变器2的线路阻抗减小,使得线路阻抗匹配,功率实现均分。
3 电压电流环控制策略
3.1 电压外环控制策略
电压外环采用二次广义积分控制器。二次广义积分控制器是由两个并联的积分器和可调节的谐振器所组成,其传递函数有带通滤波器和低通滤波器两种形式[12],分别为
式中:S为传递函数的自变量;K为闭环系统的增益;W0为被跟踪对象的角频率。
从式(15)、式(16)可知,Q(S)相对于D(S)少了一个微分环节,微分环节对高频特别敏感,若系统受到一个类似于sin(ωt)的噪声的干扰,经过了微分环节后,变为wcos(ωt),其幅值变为了原来的w倍。这说明该噪声频率越高,对带有微分环节系统的影响就越明显。因此Q(S)具有更好的抗干扰能力[13]。
3.2 电流内环控制策略
电流内环采用准比例谐振控制器。准比例谐振控制器QPR是在比例谐振控制器PR的基础上进行了相位补偿,增加了相位裕度,使得系统更加稳定。其传递函数如下:
式中:Kpa、Kr、ωc分别为比例增益、谐振增益、截止频率。
不同参数下的准比例谐振控制器伯德图如图4所示。只调节比例增益值,整个幅频特性曲线会随着比例增益的增大而上升系统的动态性能更好,调节所需的时间更短,但过大的比例增益会造成系统的不稳定;只调节谐振增益值,可以看到中频段受到它的影响最大,且二者呈正相关;只调节截止频率值,可以看到它与控制器的带宽是呈正相关的,适当的增加截止频率可以提高对谐波的抗干扰能力。
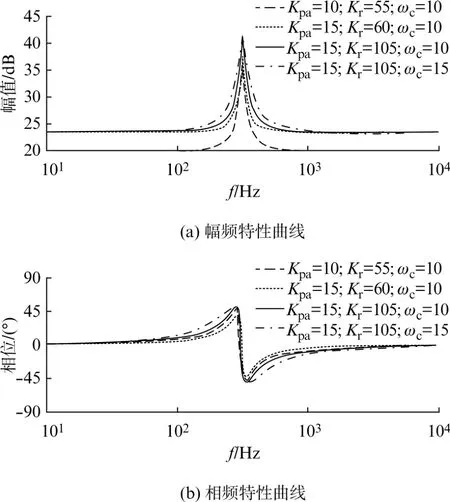
图4 准比例谐振控制器伯德图
综上所述,只有充分权衡各个参数大小对系统的利弊,才能对参考电流进行零稳态误差的追踪[14]。
4 电压和频率的补偿
下垂控制会导致公共负载的电压发生跌落,而虚拟阻抗的加入会使得该电压发生二次跌落。虚拟阻抗引入后新的参考电压为
式中:io(dq)为逆变器的输出电流。
由此可见新的参考电压相对于原先的参考电压发生了电压降落。为了确保电能的质量,需要对下垂控制的输出电压进行电压补偿[15]。采用一个闭环控制系统,以公共负载的额定电压作为参考值与下垂控制的输出电压作差得到误差,通过PID控制得到补偿电压为
式中:uref为参考电压;uc为补偿电压。
经过电压补偿后的有功下垂控制为
同理为了达到频率的无差调节,也需要对频率进行补偿,通过PID控制得到的补偿频率为
式中:fref为参考频率;fc为补偿频率。
通过频率补偿后的无功下垂控制为
5 仿真分析
为了验证改进下垂控制的有效性,在Similink当中搭建两台逆变器并联且孤岛运行的仿真模型。仿真时间为3s。仿真参数设计如表1所示。
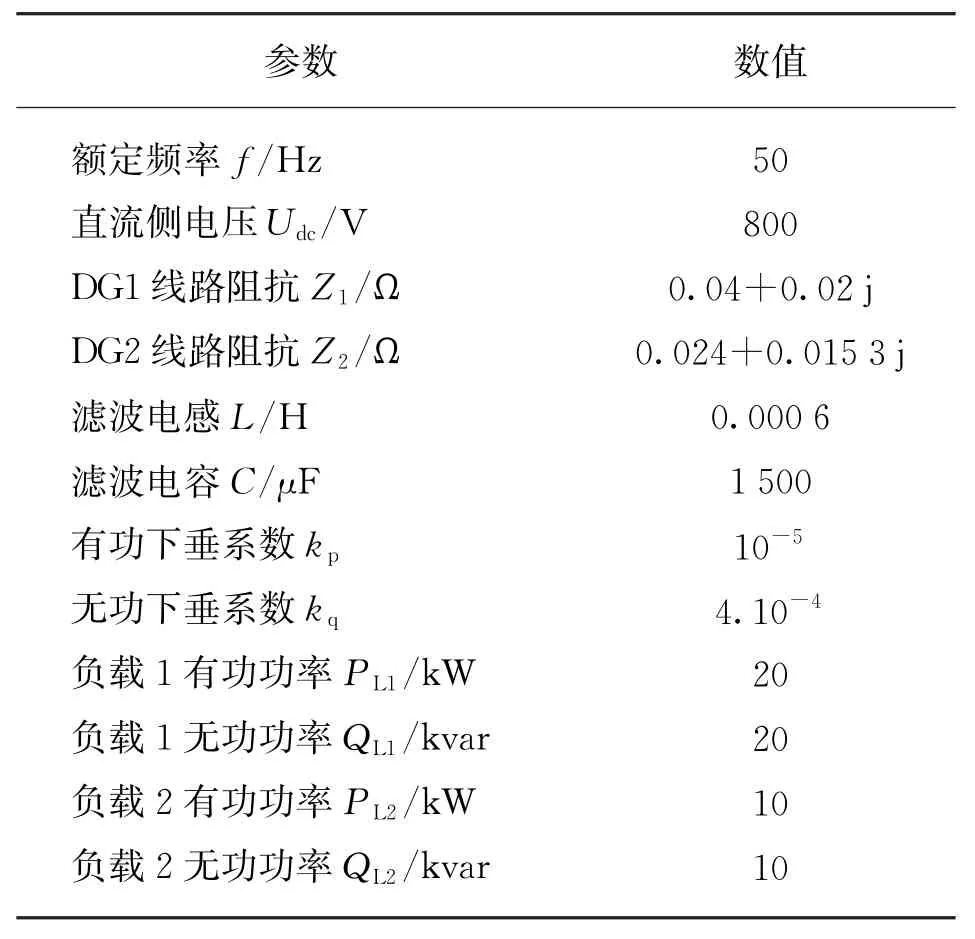
表1 仿真的参数设计
5.1 常规下垂控制仿真
两台并联逆变器带公共负载的运行情况如图5、图6所示。并联逆变器开始运行时只带有功功率为20kW、无功功率为20kvar的负载1。在1s后加入有功功率为10kW、无功功率为10kvar的负载2,在2s时断开负载2。从图中可知,在低压微网中采用传统的下垂控制,无功功率始终可以实现均分:在前1s两台逆变器各自输出相同的无功功率10kvar,两者之和恰好为负载的无功功率20kvar;在1到2s加入了负载而后,两台逆变器同样输出相同的无功功率15kvar,两者之和与负载1和负载2的无功功率之和30kvar是相等的。但由于两台逆变器之间的线路阻抗差异,导致传统下垂控制无法实现有功功率的均分:在前1s时逆变器1输出的有功功率大约为9kW,逆变器2 大约为11kW,两者之间差2kW;1到2s之间增加了负载2后,逆变器1输出的有功功率为13.5kW,逆变器2大约为16.5kW,两者之间差了3kW,由此可见,随着公共负载的增加,并联逆变器有功输出不均将会更加严重。
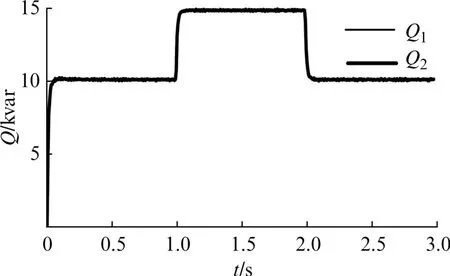
图5 传统下垂控制下的无功功率

图6 传统下垂控制下的有功功率
5.2 引入自适应虚拟阻抗的下垂控制仿真
两台逆变器采用了改进的下垂控制策略后,运行情况如图7、图8所示,无论是有功功率还是无功功率在加入负载2的前后都可以按照下垂系数实现均分,且当负载发生变化时,虚拟阻抗也能够自动调节,以适应阻抗的变化。
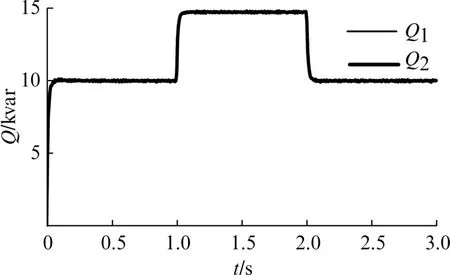
图7 改进下垂控制下的无功功率

图8 改进下垂控制下的有功功率
5.3 电压补偿以及频率分析
由同步发电机的下垂特性可知,采用该控制策略会导致公共母线的电压降落,而虚拟阻抗的引入虽然消除线路之间的阻抗差达到均分有功的目的,但会使得电压降落更严重。因此必须给下垂控制环节增加电压补偿。电压补偿前后的对比图如图9所示,无补偿环节时,公共母线电压大约由311V降落到305V;增加了补偿环节后,公共母线电压最多跌落到到310V 左右。满足公共母线电压偏差±5%以内的规定。
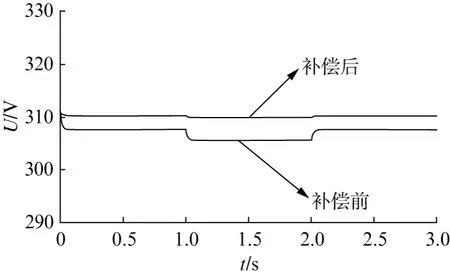
图9 电压补偿前后对比图
系统的频率补偿前后的对比图,如图10所示。经过频率补偿环节后,负荷在1s时投入,频率会略微下降后,立即恢复到50Hz;在2s时负荷切除,频率经过略微上升后,立即恢复到50Hz,并保持不变,满足小容量电力系统的频率偏差在±0.5Hz内的规定。

图10 频率补偿前后对比图
6 结 论
本文首先分析了常规下垂控制的原理以及其无法实现有功功率均分的原因。其次考虑到线路参数无法整定,引入自适应虚拟阻抗的改进下垂控制,解决了低压微网中有功均分的问题,并且加入了电压和频率补偿环节改善了公共点的电压跌落和频率波动问题。最后在电压电流环中采用二阶广义积分和准比例谐振控制器代替传统的PI控制器来提高系统的跟踪能力和电能质量。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
烟草科技(2020年10期)2020-11-07 10:38:00
中学数学杂志(初中版)(2017年4期)2017-08-28 13:59:51
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年6期)2016-04-20 06:21:15
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
音乐探索(2015年3期)2015-12-05 11:59:58
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2014年12期)2014-04-04 12:10:18