基于LMD-SECNN 的风机变桨系统故障检测
2024-03-29 10:42井露茜文传博
上海电机学院学报 2024年1期
井露茜, 文传博
(上海电机学院 电气学院, 上海 201306)
风能作为可再生的绿色能源之一[1-2],对减轻能源污染发挥着重要作用[3],然而由于设备的不稳定、风电机组的意外故障,占据了整个风电费用的很大部分[4]。在风电机组的运行中,变桨控制系统是其中的关键环节,能够提高效率,确定平稳运转[5]。因为变桨系统的控制比较复杂,运动器件比较多,工作条件比较苛刻,故障率相对较高,作为包含较多运动器件的变桨齿轮箱的健康成为该系统的关键。
目前,故障诊断方法被划分为两种类型,一种是基于模型驱动;另一种是数据驱动[6]。近几年,数据驱动方法得到了相当大的关注。文献[7]提出了采用改进灰狼算法进行优化极限随机森林算法,解决故障模型参数难以优化的问题。文献[8]结合时移多尺度样本熵和基于麻雀搜索算法的支持向量机,提出了一种基于改进变分模态分解的风机齿轮箱故障诊断方法。文献[9]提出了一种新的正态行为建模方法,利用监控和数据采集(SCADA)信息,预测风力涡轮机电动变桨系统故障,降低维护成本并防止级联故障。文献[10]提出了一种基于风电机组三相电流数据的多分量故障诊断方法,通过深度自编码器从三相电流数据中提取特征向量,并利用支持向量机进行故障分类,能够准确识别和诊断变负荷变速环境下转子驱动器的故障类别。文献[11]提出了使用长短期记忆和混合密度网络的集成框架,其具有实时系统识别功能,可用于诊断早期和细微的故障。文献[12]提出了基于模糊系统和神经网络的故障诊断方法,用于过程的输入和输出测量值与故障之间的非线性动态关系,可以直接进行故障诊断。
尽管上述方法取得了不错的故障诊断效果,但许多诊断方法在数据处理时会占用较大内存,导致速度缓慢;同时,风机故障诊断的数据处理中普遍存在着故障数据比例较少,数据不平衡的问题,对于故障诊断模型的建立和故障诊断结果的准确性造成了很大的困难。对此,本文提出了一种新的简单的学习框架,将局部均值方法(Local Mean Decomposition, LMD)及卷积神经网络相结合,增加通道注意力机制,可以直接作用于原始时间信号,并能提高故障诊断精度和可靠性。
1 基本原理
1.1 LMD基本原理
LMD把原信号分解成一组PF 成分加残余项,各PF成分可视为一个包络函数与一个调频函数之积,其详细运算过程为:
(1) 在原始信号中寻找所有的极值点,并寻找邻近两个极值点间的局域平均数,以及极值点间的局域包络函数。邻近两个极值点间的局域平均数为
式中:ni为原始信号中第i个极值点;ni+1为原始信号中第i+1个极值点。
邻近两个极值点间的局域包络函数为
(2) 从原信号中剥离局部均值函数,并获得零均值函数为
式中:x(t)为原始信号;m11(t)为局域平均值函数。
(3) 对零均值函数进行解调,得到解调后函数为
式中:a11(t)为局域包络估计函数。
局域包络估计函数由全部ai的局域包络函数线段连接,并利用滑动平均法对其进行光滑化获得。
(4) 反复进行以上第(1)至第(2)过程,即可获得相关的s11(t)包络线估算函数a12(t)。如果a12(t)=1,则s11(t)为纯调频函数;如果不满足上述纯调频函数的条件,则将此时的s11(t)作为原始信号重复进行式(3)、式(4)过程,迭代计算出s12(t),s13(t),…,s1n(t),直到s1n(t)是一个纯调频函数。
(5) 在以上步骤的迭代基础上,通过对所有的局部包络估计函数进行乘积,获得所求包络信号函数为
式中:a1q为第q个局域包络估计函数。
(6) 在原始信号中,其首个PF分量为
式中:a1(t)为原始信号的包络信号函数。
将PF1与原信号进行分离可得出u1(t)信号;此时以u1(t)作为原始信号,并不断重复上述第(1)~第(6)过程,被反复循环k次,等u1(t)变为单调函数便可得以结束。将原信号x(t)分解成k个PF分量与单调信号uk的总和,则
式中:MPFp为第p个分量。
1.2 卷积神经网络(CNN)基本原理
卷积神经网络(Convolutional Neural Networks, CNN)作为一种与人工神经网络相似的多层感知网络,其主要涵盖3层,分别是卷积层、池化层和全连接层,在图像以及自然语言处理等方面被广泛运用。卷积层的操作原理为:
池化层主要用于降低模型的数据维度,改善模型的运行速度,常用的池化方法包括最大和平均池化两种。其中,全连接层主要用于对已有的局部特性展开处理,以完成数据的回归和类别划分。
1.3 注意力机制(SE)基本原理
注意力机制(Squeeze-and-Excitation, SE)主要是以通道维度为基础,采用卷积特征通道互依赖的建模方法,进一步完善网络提取特征,有效地挖掘具有重要意义的特征,并能有效地去除无用的特征。基于该机制,神经网络能够实现特征重新校正。
SE块作为计算单元,能够对于已经给与的变换展开卷积运算
式中:*为表示卷积运算;vc为单独的通道;为二维空间核。
在卷积运算中,使V=[V1,V2,…,VC]表明对于卷积核的集合已经得以学习,同时VC为卷积核第C个所持有的具体参数值。vc=[,,…,],X=[X1,X2,…,XC′]将其中的偏差项进行忽略。
因为该模型的结果是对各信道进行累加得到的,所以模型中隐藏着信道的相依,而这种相依又被滤波器捕捉到。
2 LMD-SECNN故障诊断模型
由于在工程的实际应用中,风机一般处于常态运行中,难以得到充分的故障信息来训练诊断模型,导致故障的有关数据远远小于常态信息。在这样的非均衡条件下,仅利用少量的故障数据对智能诊断模型进行训练,将会造成系统精度和模型泛化的性能下降。此外,风机变桨系统齿轮箱故障时振动信号比较复杂,直接利用神经网络进行学习会影响特征的提取,从而造成风机故障诊断结果的不准确。为解决这个问题,本文提出了一种在利用LMD进行数据处理的基础上引入注意力机制的卷积神经网络故障诊断方法,称为LMD-SECNN 模型,模型结构如图1所示。
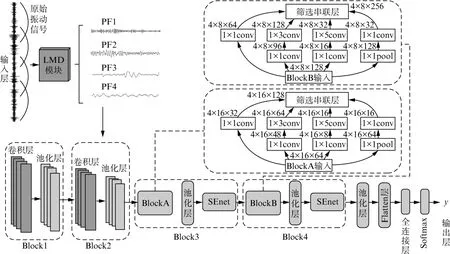
图1 LMD-SECNN模型结构
3 实验结果与分析
利用HFXZ-Ⅱ实验平台对所提出的理论和算法进行验证。采用Windows11进行模拟试验,采用11th Gen Intel(R)核心i5-11320H@3.20GHz-2.50GHz、内置内存16GB,64 位系统,以及PyTorch作为深度神经网络的基本架构。
3.1 实验数据描述
HFXZ-Ⅱ试验台由耦合器、电机、制动、行星齿轮箱等构成。试验所用传感器共4个测点,垂直方向2个,其他方向各1个。故障类型包括齿轮缺齿、齿面磨损、齿根缺陷、齿轮轴承外圈故障及综合故障等。数据是在负荷条件下进行获取,旋转速度为2700r/min,采样频率是12kHz。本文中只选取了垂直方向的传感器数据作为试验的样本数据,使用随机采样方法获取原始数据,作为试验样本,每个类别的样本数量为1000个,测试集300,训练集为700,每个样本2048数据点。
为了提取原始输入信号中明显的故障特征,将LMD-SECNN模型的神经网络部分设置很深,而且第一层设置很宽。在计算机视觉中,数据扩充经常用于增加训练样本的数量,以提高CNN 的泛化性能[14]。但是,由于缺乏充分的数据集,该方法极易造成模型的过拟合,本文通过对具有重叠的训练样本进行切片来获得大量数据。
3.2 模型参数设置
实验中使用的所提出的LMD-SECNN 模型的架构包含4个block块,以及池化层、Flatten层、全连接层和softmax层,如图1所示。在配置参数时,随着卷积核数量、核宽度、层深度的增加和步长的减小,神经元数量会增加,这提高了模型的容积,但也更容易过度拟合。因此,需要扩大训练信号之间的重叠大小,以增加训练样本的数量。LMD-SECNN网络的输入量为2048×1的切片后的初始时间域数据。LMD-SECNN模型的参数如表1所示。
3.3 实验结果与分析
为了验证本文所提模型的有效性,选取了风机齿轮箱的7个故障数据进行故障诊断实验,故障分别为行星齿轮轴承外圈故障、行星齿轮脱落、行星齿轮缺齿、行星齿轮复合故障、行星齿轮齿根缺陷、太阳轮齿面磨损、太阳轮齿根缺陷。原始信号数据输入LMD-SECNN模型后,经过LMD模块处理,生成PF分量作为神经网络的输入。
以10个反复试验的平均数为最终结果,每个试验进行100次反复训练。利用t-SNE方法实现了对该方法的注意力层上所抽取的特征的可视化。图2(a)中t-SNE可视化的结果显示在block1的过程中,各种类型的数据互相混合,分类效率低;但经过模型各模块处理后数据开始初步呈现聚类效果,并在全连接层处理后全部样本基本上进行了归类,最终的t-SNE可视化的结果由图2(b)所示,全部样本都被完整地划分成了8个类别,且聚类效应显著。
为更准确表现本文所提模型的故障诊断效果,图3(a)和图3(b)给出了模型的训练曲线及其Loss曲线。显而易见,无论是训练集还是测试集都在第20次左右的时候开始收敛,在第40次左右的时候达到收敛,显示出了本模型的计算速度及对于风机变桨系统齿轮箱故障的诊断能力。
图4(a)和图4(b)显示了Block3和Block4中的SEnet处理后的不同特征在通道维度上的注意权重分布。由图可知,SEnet对于不同的特征,根据其重要程度给予相应的权值,使模型能更好地将注意力集中在显著特性上。
为精炼该算法中的错误类别条件,将其归类结果以模糊矩阵表达,其中水平坐标是预计标签,垂直坐标是实际标签。从图5可以看出,行星齿轮复合故障、行星齿轮齿根缺齿、行星齿轮脱落和正常数据中各有2个样本被预测错误,太阳轮齿根缺齿和太阳轮齿面磨损各有1个样本被预测错误,行星齿轮缺齿数据中有4个样本被预测错误,这主要由于个别故障被误诊为别的类型。行星齿轮轴承外圈故障的故障分类准确率100%。因此,本文模型可以从风机变桨齿轮箱的振动信号中正确地提取到与故障相关的特征,并展开高效识别和分类。
为证实本文所提模型的优越性,然后将该试验与CNN、CNN-LSTM[15]作比较。CNN-LSTM 为文献[15]提出的故障诊断方法,其模型主要由1个卷积层、1个池化层、2个LSTM 层和Softmax层组成。算法所用的数据都是未经过任何处理的原数据。为进一步证实本文模型的有效性,与不进行LMD预处理的同模型方法及未增加注意力机制SEnet的同模型方法进行实验比较。5种模型的故障诊断结果如图6所示,LMD-SECNN 模型的准确率为99.42%,为其中最高,所以它的故障诊断与检测能力最好。
4 结 论
针对风机变桨系统变桨齿轮箱的机械故障,提出了一个新的故障诊断模型,即LMD-SECNN 模型。本模型在利用LMD 处理原始数据的基础上引入有注意力机制的卷积神经网络,首先利用局部均值分解法对数据进行预处理,最大限度的保存了原始信号里的故障特征,分解形成的诸多PF 分量,也在一定程度上解决了故障数据不平衡的问题。然后将各PF分量作为神经网络模型的输入,该神经网络以inception v1架构为基础,并增加了通道注意力SEnet模块,既减少了参数量,又避免了模型计算量过大的问题使得故障特征更加明显。经过实验验证,LMD-SECNN 模型的准确率达到99.42%,远高于对比模型的准确率,验证了所提方法的有效性和优越性。
猜你喜欢
内燃机工程(2021年6期)2021-12-10
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
电子测试(2018年18期)2018-11-14
制造技术与机床(2017年3期)2017-06-23
中国医学装备(2015年10期)2015-12-29
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
电测与仪表(2015年7期)2015-04-09
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
振动、测试与诊断(2014年5期)2014-03-01