
基于视觉信息加工的草原公路行车安全性分析
2024-03-08 05:58王海晓
重庆交通大学学报(自然科学版) 2024年2期
王海晓,丁 旭,郭 敏,吕 贞
(内蒙古农业大学 能源与交通工程学院,内蒙古 呼和浩特 010018)
0 引 言
在道路交通系统中,驾驶人处于主体地位,同时也是其中的一个薄弱环节[1],交通事故致因分析结果显示,人因造成的交通事故比例高达92.6%[2]。驾驶过程中,驾驶人需要时刻感知行车环境的变化,其中约80%的交通环境信息通过驾驶人视觉通道传递,驾驶人在行车环境中的视觉行为与驾驶安全息息相关[3]。因此,从人因角度探讨行车环境与驾驶人视觉信息加工之间的影响关系具有重要意义。
驾驶人的视觉信息加工模式表征其对于视觉信息的获取与处理过程[2]。良好的视觉信息加工模式是驾驶人从行车环境中及时获取有用和高质量视觉信息的前提,确保驾驶人对行车时潜在危险的早发现、早判断、早决策,以调整驾驶策略及行为,保证车辆的安全运行[4]。当驾驶人处于复杂行车环境时,需要接收处理的信息量增多,在交通信息加工过程中所消耗的视觉资源增大,当驾驶人所承受的视觉信息加工强度达到极限时,可能会出现信息搜索不足或不及时的情况,产生迟滞反应或决策失误等危险驾驶行为,行车安全性降低[5-6]。
近年来,国内外学者围绕行车环境对驾驶人视觉信息加工影响方面进行了相关研究。秦雅琴等[7]为分析山区低等级公路各典型路段驾驶人的视觉差异性,搭建了山区低等级公路场景开展驾驶仿真实验,发现5种典型路段中驾驶人的视觉特性存在差异;李显生等[8]为探究应激响应对驾驶人视觉特性的影响,设计了4种应激场景进行模拟驾驶实验,发现场景中存在移动目标物时驾驶人获取视觉信息的注视区域增多;Q.C.SUN等[9]通过开展城市道路实驾实验建立数据库,提出了基于注视的综合驾驶评估方法以研究驾驶人的视觉运动协调性,分析表明老年驾驶人在环岛和交叉口行车时表现出不同的视觉搜索模式。
综上所述,以往研究发现驾驶人的视觉信息加工模式受到行车环境的影响,但少有对其影响程度进行更加细致、深入的定量分析,且研究结论大多是针对城市道路、高速公路和山区道路行车环境,尚缺乏对比草原公路不同行车环境下驾驶人视觉信息加工特性的研究。草原公路作为道路交通的特殊路段,由于受到地形地貌等环境条件限制,现有草原公路普遍缺少中央分隔带与路侧护栏设置,加上车型复杂多样、车速分布离散,凸显交通安全设施落后、管理水平不高等一系列特点,行车过程易受到对向交通流和路侧环境的干扰,交通秩序相比其他道路环境更为混乱。当行车环境发生突变时,驾驶人对视觉信息的搜索和感知需求量瞬时增加,视觉稳定性下降,可能导致驾驶人做出错误的驾驶判断和决策,行车安全更易受到影响。
因此,研究草原公路不同行车环境下驾驶人的视觉信息加工特性,对于针对性纠正驾驶人在草原公路的不良视觉信息加工行为,进一步探究草原公路的行车安全隐患及事故致因具有重要的理论价值。鉴于此,笔者选取典型草原公路开展实车实验,采集驾驶人在不同行车环境下的眼动数据,从视觉分配和视觉搜索两个维度构建评价指标体系,基于多特征视觉参数探讨驾驶人的视觉信息加工模式在不同行车环境下的差异性,并结合CRITIC法建立加权秩和比综合评价模型,引入视觉信息加工强度的概念对行车安全做出分级评价。
1 草原公路实车实验
1.1 实验路段
选取S101省道内蒙古锡林浩特市境内赛罕塔拉至满都拉图段的二级草原公路作为实验路段。该路段采用双向两车道设计,全长约150 km,设计车速为80 km/h。通过实地观测与考察,实验路段交通状况基本处于自由流,交叉口均采用主路优先的控制方式,纵坡坡度较小,交通设施设置不完善,符合典型草原公路的特征,满足实验要求。
1.2 实验设备
实验所用车辆为大众帕萨特自动挡型轿车,车况良好。选用德国SMI公司生产的Iview X HED型眼动仪采集驾驶人的眼动数据,设置采样频率为200 Hz,通过连接专用笔记本电脑进行眼动数据的采集和记录,利用配套软件Begaze导出视频与对应的文本数据,主要实验设备如图1。同时,在实验车辆内配备手持照度计和噪声仪等辅助设备,以尽可能控制实验条件的一致。

图1 实验主要设备Fig.1 Test main equipment
1.3 实验对象
为使被试人员能较好的反映驾驶人的群体规律特性,基于多重筛选准则招募16名被试人员,年龄为24~49岁(均值:31.2,标准差:7.9),驾龄均在两年以上(均值:7.2,标准差:5.0)。被试人员均持有有效驾驶执照,双眼视觉功能正常且裸眼或矫正视力在4.8以上,无精神类疾病史和重特大交通事故经历。为保证数据采集的客观性,实验前24 h确保被试人员的正常作息,无酒精或药物摄入。
1.4 实验流程
实车实验安排在气候条件适宜的九月份进行,为避免光照强度以及交通状况的影响,实验时间均设置在天气晴朗的上午8:00—11:00的非高峰时段。借助照度计和噪声仪测量车内主驾驶位的照度和噪声数值,确保实验环境条件的一致性。每次实验时长约2 h,考虑到实验实施的条件限制和人员安全问题,同时防止同一路段的反复实验使被试人员熟悉驾驶环境,致获取的眼动数据有效性降低。因此,所有被试人员均为单次实验,未进行重复实验。
实验开始前,工作人员向被试人员讲解实验内容和注意事项,被试人员需签署知情同意书,填写调查问卷以记录其年龄、驾龄、驾驶里程等基本信息。随后被试人员进入实验车内,完成座椅调试,并在工作人员的帮助下佩戴眼动仪并校准。被试人员先进行10 min的实驾训练至实验路段起点处,以适应眼动仪的佩戴及驾驶环境。随后在车辆静止状态下进行5 min的静态眼动数据测试,此过程被试人员尽量保持平视,心理处于放松状态。开始正式实验,被试人员驾驶实验车辆从起点出发,按照计划路线前往指定目的,要求被试人员在遵守交通规则及道路限速的要求下按照自身的驾驶习惯进行车辆操控。行车过程中工作人员时刻关注眼动数据采集的平台界面,确保眼动仪的正常运行。实验结束后,及时整理汇总被试人员基本信息和眼动仪采集数据。
1.5 数据预处理
1.5.1 行车环境划分
实验路段为典型的草原公路,采用双向两车道设计,由于缺少中央分隔带与路侧护栏设置,行车过程易受到对向交通流和路侧环境的干扰,且路段交叉口无信号管控,均采用主路优先控制,主干道交通运行受到支路横向交通流的干扰,存在安全隐患。限于交通管控不足,实验路段车型复杂多样、车速分布离散,行车易受到同向车道内其他车辆的影响。笔者将场景环境及触发的行车事件统一归纳为行车环境,综合考虑草原公路的道路特征、环境特点以及交通安全设施设置等因素,研究选取的行车环境包括:跟驰、对向来车、后车切入、路侧风险、交叉口,同时选取行车过程中在视野范围内无其他交通参与者、路侧风险、交叉口的时段作为对照组,将其定义为自由行驶环境,各种行车环境的示图如图2。为排除道路线形、安全设施等因素对实验结果的干扰,研究均以时间为单位截取驾驶人在平稳直行路段行驶时的眼动数据。
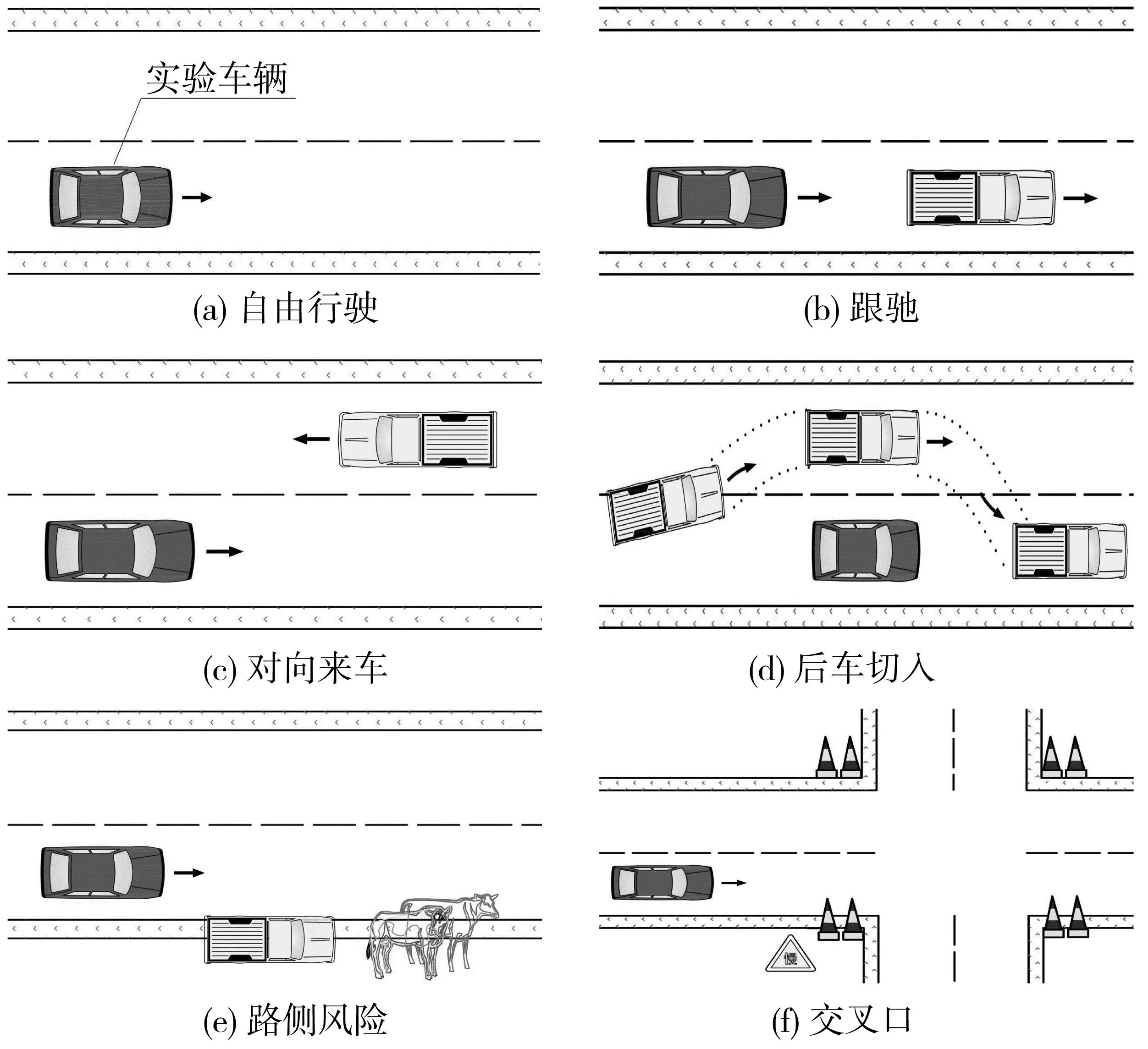
图2 行车环境示意Fig.2 Schematic diagram of driving environments
科学合理的数据时窗截取将影响研究结果的准确性与可信度,考虑到不同行车环境所对应的时窗宽度存在差异,参照已有研究成果并结合草原公路实车实验过程中的客观现象,不同行车环境的解释及时窗宽度截取如表1。

表1 行车环境的解释及数据时窗Table 1 Interpretation and data time windows of driving environments
1.5.2 数据清洗
研究重点分析草原公路6种行车环境下被试人员的眼动数据。为保证研究结果的有效性、合理性,16名被试人员按照要求完成实验后,首先运用眼动仪配套软件Begaze对数据进行筛选,剔除丢失和校准偏差严重的数据,研究共计提取了涉及16名被试人员的953个不同行车环境下的眼动数据集,并利用ORIGIN、SPSS等软件进行后续的统计与分析研究。
2 结果与分析
行车过程中,驾驶人作为信息接收源,主要基于视觉通道获取行车环境信息,以指导驾驶决策和车辆操控,保证行车安全。因而,行车环境的变化将直接影响驾驶人的视觉信息接收量,进而引起个体视觉行为的变化[10]。不同行车环境中驾驶人加工视觉信息的工作量和紧迫性存在差异,有必要结合多特征视觉参数完整表达驾驶人视觉信息加工模式的变化。笔者从视觉分配和视觉搜索两个维度探讨草原公路不同行车环境下驾驶人视觉信息加工模式的差异性。其中,视觉分配着重分析驾驶人视觉注意的空间分布特性,构建视点分布信息熵表征驾驶人的视觉分配机制;视觉搜索以驾驶人扫视幅度和扫视速度为基础参数,用以反映驾驶人视觉注意动态转移的过程。
2.1 驾驶人视觉分配特性
2.1.1 兴趣区域划分
草原公路行车环境的改变使驾驶人视野范围内不同区域的信息密度和重要程度存在差异,为提取到有效的行车环境信息,驾驶人的视觉分配过程将具有主观偏向性,更加关注与行车安全直接相关的区域目标信息[11]。为对比研究不同行车环境下驾驶人视觉分配模式的差异性,需要对驾驶人的视野平面进行兴趣区域(areas of interest,AOI)划分。
根据研究目的并结合草原公路环境特征,采用动态聚类法将驾驶人的视野平面划分成5个区域,具体划分结果如图3。其中:A为当前行驶车道;B为对向车道;C为道路右侧及右后视镜区域;D为道路左侧及左后视镜区域;E为车内仪表盘区域。

图3 驾驶人视觉兴趣区域划分Fig.3 Division of driver’s visual area of interest
2.1.2 视点平稳分布概率
驾驶人的视点转移过程中,将注视点落到不同的兴趣区域归类为不同的状态,下一个注视点所处的兴趣区域仅与当前状态有关,且时间和状态均为离散,符合马尔可夫链的特性[7,12]。因此,基于驾驶人的视觉兴趣区域划分结果,可以借助马尔可夫链平稳分布理论对驾驶人的注视点分布情况进行预测分析,进而探究不同行车环境下驾驶人视觉分配的差异性。
将驾驶人的视野平面划分成5个兴趣区域,设1、2、3、4、5为注视点的5种状态,分别对应兴趣区域A、B、C、D、E。因此,驾驶人的视点转移过程可看作状态空间I={1,2,…,5}的马尔可夫链,构造出注视点的一步转移概率矩阵P为:
(1)

利用驾驶人的注视点数据构建的马尔可夫链是有限状态的不可约且非周期型的,结合马尔可夫链的相关定理,必存在平稳分布。将视点转移概率pij代入式(2),最终求解得到各兴趣区域的视点平稳分布概率πj,以此表征注视点分配到各个兴趣区域概率的稳定值。
(2)
驾驶人在不同行车环境下各兴趣区域的视点平稳分布概率如图4。6种行车环境下,注视点分布在区域A的概率均为最高,达到47%以上,表示当前行驶车道是驾驶人获取行车环境信息的主视区域。相较于自由行驶状态,其他5种相对复杂的行车环境下注视点在区域A的平稳分布概率呈现出不同程度的下降趋势,其中跟驰时平稳分布概率降幅较小为17.62%,而交叉口通行和遇到路侧风险时,区域A的平稳分布概率骤降,降幅分别达到38.60%和39.18%,表明驾驶人对于当前车道区域的关注度显著下降,将更多注意力分配到了其它区域。进一步分析其原因,可得到如下结论:

图4 不同行车环境下各兴趣区域的视点平稳分布概率Fig.4 Stationary distribution probability of fixation points in each area of interest under different driving environments
1)车辆处于跟驰行驶时,注视点在区域E的平稳分布概率明显高于其它行车环境,达到21.1%。表明驾驶人在跟随前车行驶时需要时刻关注前车的运行状态,控制车速以保持安全的跟车距离,因而对车内仪表盘区域的关注度有所增加。
2)当行车过程中有对向来车时,注视点在区域B的平稳分布概率明显高于其它行车环境,达到29.95%。这是由于草原公路没有设置中央分隔带且缺乏交通管制,致使行车速度通常会高于道路设计车速,当对向车道有车辆驶来,特别是大中型货车时,驾驶人会将部分注意力转移到对向车辆上,控制会车时安全的横向间距。
3)当行车途中遇到后方车辆实施借道超车行为切入到实验车辆前方时,视点平稳分布概率在区域B和D分别增至21.38%和12.25%。表明驾驶人从对向车道或左后视镜观察到后方超车车辆至其越过道路中心线到切入实验车辆前方的整个过程中,两车的安全距离和行车速度存在相互制约性,驾驶人会时刻关注切入车辆的行驶状态,以调整驾驶策略及行为,保证车辆的安全运行。
4)当道路右侧出现随机风险点时,视点平稳分布概率在区域E和随机风险点出现的区域C显著增加,分别为14.70%和29.15%。表明驾驶人需要时刻关注风险点的动态信息并会采取一定的制动措施,以应对风险点运动状态的随机变化。
5)实验车辆直行通过交叉口时,注视点分布较为离散,且视点平稳分布概率在区域C和D的增幅更为显著,分别增至20.57%和14.39%。由于草原公路均为主路优先控制交叉口,车辆行至交叉口前驾驶人会及时搜集交叉口内和两侧支路衔接段等多个区域内的交通信息,以保证车辆在交叉口的安全通行。
2.1.3 视点分布信息熵
信息熵是信息论中量化信息量的指标,借鉴了热力学的概念,是系统无序性或随机性的度量[13]。在对驾驶人视野平面划分的基础上,根据马尔可夫链理论计算出注视点在各兴趣区域的平稳分布概率,虽然可以解析不同行车环境下注视点在各兴趣区域分布的共性与差异性,但不能量化研究驾驶人在整个视野平面的视觉分配变化特性。
基于此,将马尔可夫链理论引入到信息熵研究中,借助视点平稳分布概率求得驾驶人在不同行车环境下的视点分布信息熵,量化视觉分配特性的无序程度,间接评估驾驶人在整个视觉区域获取交通信息的复杂度。信息熵越高,表明驾驶人注意力分配的区域越多,注视点分布越离散,致使提取目标信息难度越大。信息熵计算公式为:
(3)
式中:H为视点分布信息熵,bits;πj为注视点在第j视觉兴趣区域内的平稳分布概率,πj≥0,当πj=0时,πjlog2πj=0;h为兴趣区域划分数,文中h=5。
计算得到不同行车环境下驾驶人的视点分布信息熵如图5。采用单因素重复测量方差分析研究视点分布信息熵在不同行车环境下的差异显著性,Shapiro-Wilk检验显示各组数据均服从正态分布(p>0.05),Mauchly’s球形度检验显示不满足球形假设(W=0.133,p=0.023<0.05),因而使用Greenhouse-Geisser校正结果。分析表明行车环境对驾驶人的视点分布信息熵存在显著性影响(F=8.438,p=1.530×10-4<0.05)。

图5 不同行车环境下驾驶人视点分布信息熵对比Fig.5 Comparison of information entropy of drivers’ fixation point distribution in different driving environments
由图5可知,相较于自由行驶,驾驶人处于其它5种相对复杂的行车环境下视点分布信息熵均呈增大趋势,表明行车环境信息的增多使驾驶人扩大了视觉注意分配的区域,注视点分布更加离散,提取目标信息难度增大。其中,在遇到路侧风险时的平均信息熵激增,相较自由行驶增幅达到66.25%,表明路侧风险的出现会显著影响驾驶人的视觉资源分配。在自由行驶和后车切入时,信息熵的变异程度较大,这是由于自由行驶时驾驶人不需要关注特定的兴趣区域,视觉分配过程受到个体视觉习惯和心理情绪的影响,随机性较强;当遇到后车超车切入时,限于环境感知和反应特性的个体差异性,驾驶人关注到后方车辆的兴趣区域和时间点不同,致使视觉分配过程因人而异。
为进一步研究自由行驶与其它5种行车环境间视点分布信息熵的差异性,采用Tukey法进行事后两两比较如表2。结果表明:除自由行驶与跟驰行驶间的视点分布信息熵呈现边缘显著性差异(p<0.1),与其它4种行车环境之间均存在显著性差异。
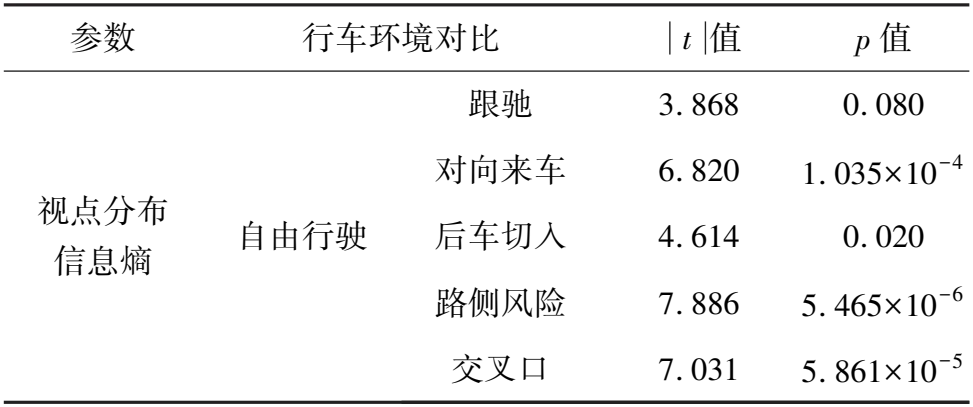
表2 不同行车环境下视点分布信息熵显著性检验结果Table 2 The significance test results of information entropy of fixation point distribution in different driving environments
2.2 驾驶人视觉搜索特性
2.2.1 扫视幅度
扫视幅度是指一次扫视过程中视线所覆盖的范围,表征驾驶人对视觉信息的搜索范围。采用单因素重复测量方差分析研究扫视幅度在不同行车环境下的差异显著性,Shapiro-Wilk检验显示各组数据均服从正态分布(p>0.05),且通过球形度检验(W=0.249,p=0.197>0.05)。分析结果表明行车环境对驾驶人的扫视幅度存在显著性影响(F=5.041,p=4.899×10-4<0.05)。
不同行车环境下驾驶人的扫视幅度如图6。

图6 不同行车环境下驾驶人扫视幅度对比Fig.6 Comparison of drivers’ saccade amplitude in different driving environments
相较于自由行驶,驾驶人处于其它5种相对复杂的行车环境下扫视幅度普遍增大。其中,跟驰时扫视幅度的增幅较小,驾驶人的跟驰行为受到前车速度的制约,为保持安全的跟驰间距,在关注前车运行状态时会将少部分视线转移到车内仪表盘区域,以搜索感知行车速度信息。而驾驶人在交叉口通行时的扫视幅度激增,相较自由行驶增幅达到72.88%,这是因为驾驶人行径交叉口时需要不断搜索感知交叉口两侧支路衔接段内的交通环境信息,扩大了水平方向的视觉搜索范围,表现出更大的扫视幅度。
采用Tukey法进行事后两两比较如表3。结果表明:自由行驶与路侧风险和交叉口之间的扫视幅度存在显著性差异,与对向来车和后车切入之间的扫视幅度呈边缘显著性差异(p<0.1),而与跟驰行驶不存在显著的统计学差异。
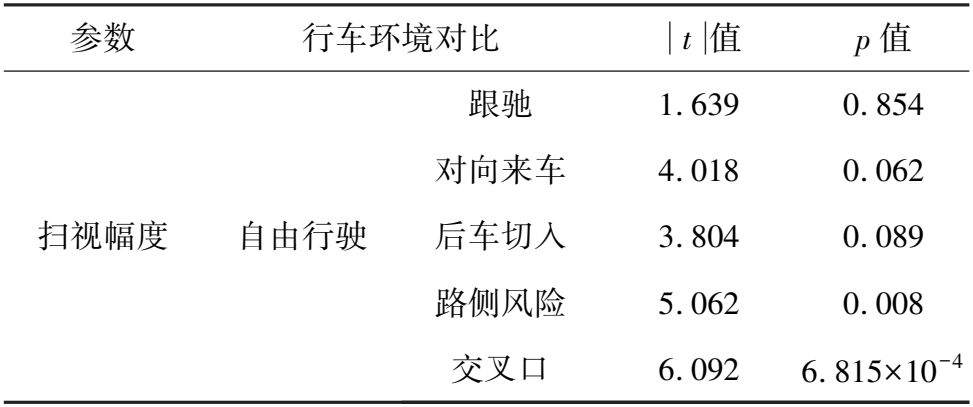
表3 不同行车环境下扫视幅度的显著性检验结果Table 3 The significance test results of saccade amplitude in different driving environments
2.2.2 扫视速度
扫视速度表征信息搜索过程中眼球转动的快慢,即扫视角度与持续时间的比值。通常行车环境越复杂,视区内所包含的信息量较大时,会导致驾驶人扫视速度加快,视觉稳定性下降[14]。经检验,各组数据均服从正态分布(p>0.05),且满足球形假设(W=0.427,p=0.673>0.05)。单因素重复测量方差分析表明行车环境对驾驶人的扫视速度存在显著性影响(F=4.863,p=6.609×10-4<0.05)。
不同行车环境下驾驶人的扫视速度如图7。

图7 不同行车环境下驾驶人扫视速度对比Fig.7 Comparison of drivers’ saccade velocity in different driving environments
自由行驶时平均扫视速度最低,由于行车环境相对舒适安全,驾驶人不需要频繁搜索周边环境信息,环境感知力和警觉性较低,处于低负荷驾驶状态。而行车过程中遇到后车超车切入时,驾驶人的平均扫视速度最大,相较自由行驶增幅达到93.35%,其原因可能是后方车辆的突然切入,对驾驶人产生了较强的视觉刺激,使得驾驶人警觉性迅速上升,表现为迅速搜索感知切入车辆的行驶状态信息,指导决策和车辆操控。
采用Tukey法进行事后两两比较如表4。结果表明,自由行驶与跟驰和对向来车之间的扫视速度存在边缘显著性差异(p<0.1),而与其它3种行车环境之间的扫视速度呈显著性差异。

表4 不同行车环境下扫视速度的显著性检验结果Table 4 The significance test results of saccade velocity in different driving environments
2.3 基于视觉信息加工强度的行车安全评价
驾驶人的视觉信息加工强度综合表征了其在交通环境信息加工过程中所消耗的视觉资源,受到行车环境条件的影响[5]。从视觉分配和视觉搜索两个维度选取视点分布信息熵、扫视幅度、扫视速度3项指标构建评价指标体系,结合数理统计方法分析了不同行车环境下各指标的差异性变化,揭示了驾驶人采取的针对性视觉信息加工模式。为探究不同行车环境下驾驶人提取交通环境信息所消耗的视觉资源,选取上述指标作为驾驶人视觉信息加工强度的评价依据,引入基于CRITIC法的加权秩和比综合评价模型,以期从视觉信息加工层面评价不同行车环境中的驾驶安全水平。
加权秩和比法是一种多指标综合评价模型,其基本原理是根据各评价对象的指标值大小进行编秩,结合各评价指标的权重系数,通过秩转换获得无量纲统计量加权秩和比(weighted rank-sum ratio,WRSR),根据评价对象的加权秩和比进行相对优劣的排序分档[15]。运用加权秩和比法对不同行车环境下驾驶人的视觉信息加工强度进行综合评价,具体步骤如下:
1)构建评价矩阵。分别将不同行车环境下各视觉评价指标数据取均值,并根据式(4)进行数据区间化处理,以消除指标量纲和数量级的影响。构建m种行车环境和n项视觉评价指标组成的评价矩阵Y=(yij)m×n。
(4)
式中:yij为区间化处理后的第i种行车环境下的第j项视觉评价指标数据;xij为指标原始数据;xjmax和xjmin分别为第j项指标原始数据的极大值和极小值。为便于指标权重的计算,取a=0.01,b=0.99,即数据区间化范围取0.01~0.99。
2)指标权重计算。采用CRITIC法构建指标的权重体系,计算各项视觉评价指标的标准差和指标间的相关系数,以综合衡量指标包含的信息量,确定指标权重wj[16],计算结果见表5。
(5)
(6)
式中:Ij为第j项指标包含的信息量;σj为标准差;rkj为第k与j项视觉评价指标之间的Pearson相关系数。

表5 基于CRITIC法的指标赋权结果Table 5 Weighting results of indicators based on the CRITIC method
3)编写秩次,计算WR值。采用非整次法,即利用类似线性插值的方式对评价矩阵进行编秩。在视觉信息加工强度指标体系中,所选取的3项视觉评价指标均为低优指标,因此,采用式(7)对各视觉评价指标值进行编秩,并基于式(8)计算出各行车环境的WR值,结果见表6。
(7)
(8)
式中:WRi为第i种行车环境的加权秩和比;Rij为第i种行车环境下的第j个视觉评价指标的秩次;yjmax和yjmin分别为区间化处理后的第j项视觉评价指标的极大值和极小值。

表6 编秩结果及加权秩和比Table 6 Ranking results and weighted rank-sum ratio

Pri=u(pi)+5
(9)
式中:u(pi)为累计频率pi对应的标准正态离差。

表7 加权秩和比频率分布Table 7 Frequency distribution of weighted rank-sum ratio
5)计算回归方程。针对Pr值与WR值进行相关性分析,结果显示两者存在显著相关性(相关系数r=0.939)。以Pr值为自变量,WR值为因变量,拟合得到线性回归方程为:
WR=-0.928+0.268Pr
(10)
模型判定系数R2=0.882,回归模型的方差分析结果显示F=29.770,p=0.005<0.05,模型拟合程度较好。
6)视觉信息加工强度分档排序。将各行车环境的Pr值代入回归方程,得到对应的WR拟合值,WR拟合值越大,表示驾驶人的视觉信息加工强度越小,行车安全性越高。按照合理分档原则将视觉信息加工强度划分为低、适中、较高、高4档,根据各行车环境的WR拟合值进行分档归类,结果详见表8。

表8 视觉信息加工强度分档评价结果Table 8 Results of graded evaluation of visual information processing intensity
由表8可知,将6种行车环境按照WR值降序排列,从大到小依次为:自由行驶、跟驰、对向来车、后车切入、交叉口、路侧风险。驾驶人在自由行驶时的视觉信息加工强度最低,表明行车环境传达给驾驶人的视觉刺激较小,驾驶人感知到的视觉信息较少,行车安全性相对较高。而后车切入、路侧风险和交叉口的视觉信息加工强度划分在较高等级。其中,行车时遇到路侧风险时驾驶人的视觉信息加工强度最大,驾驶人的警觉性显著提高,需要加工处理更多的视觉信息以指导驾驶决策,行车安全性相对更低,需要优先考虑采取相应的安全改善措施。
构建的加权秩和比评价模型具有一定的局限性,在对原始数据进行秩转换时会损失部分信息,且指标选取的差异将影响权重的赋值,进而影响视觉信息加工强度的评价结果。因此,后续仍需对指标的敏感性和适用场景进行深入研究,并结合多种评价模型进行对比验证,以保证结果的客观合理性。
3 结 论
针对以往研究缺乏草原公路不同行车环境下驾驶人视觉信息加工特性的深入探讨,笔者设计开展草原公路实车实验,采集了6种真实行车环境下驾驶人的眼动数据,围绕视觉分配和视觉搜索2个维度解析驾驶人的视觉信息加工模式在不同行车环境下的差异性,从视觉信息加工层面对不同行车环境的驾驶安全水平做出评价,得出如下结论:
1)采用动态聚类法将驾驶人的视觉兴趣区域划分为5部分,结合马尔可夫链理论对驾驶人在不同行车环境下的注视点分布特性进行了预测分析。发现在6种行车环境中,驾驶人的注视点在当前车道区域的平稳分布概率均为最高,达到47%以上,表示当前行驶车道是驾驶人获取行车环境信息的主视区域。而相较于自由行驶,其它5种相对复杂的行车环境中注视点分布在当前车道区域的概率均呈下降趋势,驾驶人将更多的视觉注意力分配到了其它兴趣区域。
2)将信息熵与马尔可夫链平稳分布理论结合,构建视点分布信息熵表征驾驶人的视觉分配特性,并引入扫视幅度、扫视速度分析驾驶人对视觉信息的搜索过程。数理统计结果显示,各项视觉评价指标随行车环境的变化呈显著的统计学差异,行车环境信息的增加使驾驶人扩大了视觉注意分配的区域,表现出更大的扫视幅度和扫视速度。
3)构建基于CRITIC法的加权秩和比评价模型,引入视觉信息加工强度的概念对行车安全做出分级评价。分析可知,驾驶人在自由行驶时的视觉信息加工强度最低,而后车切入、路侧风险和交叉口的视觉信息加工强度划分在较高等级。其中,行车时遇到路侧风险时驾驶人的视觉信息加工强度最大,驾驶人的警觉性显著提高,需要加工处理更多的视觉信息以指导驾驶决策,行车安全性相对更低。
有助于完善视觉信息加工行为的评价指标体系和分析方法,对于针对性纠正驾驶人在草原公路的不良视觉信息加工行为,深入探究草原公路的行车安全隐患及事故致因具有重要的理论价值,此外,实车实验的设计以及行车环境的选取可作为类似研究的参考。研究结论可为驾驶行为干预及分级预警、草原公路设施安全改善提供指导。
猜你喜欢
智能建筑与智慧城市(2022年9期)2022-09-28
兰州理工大学学报(2021年5期)2021-11-02
东华大学学报(自然科学版)(2018年1期)2018-06-29
体育时空(2017年6期)2017-07-14
复旦学报(自然科学版)(2016年4期)2016-09-21
科技与创新(2016年13期)2016-07-22
河南电力(2016年5期)2016-02-06
物理教学探讨(2015年3期)2015-05-20
新闻前哨(2015年2期)2015-03-11
中国水利(2015年5期)2015-02-28
