
基于RBF-PID 的无障碍升降平台调速控制策略
2024-02-27 12:16李妍杜佳亮刘冉
电子设计工程 2024年3期
李妍,韩 飞,李 姝,杜佳亮,刘冉
(北方工业大学机械与材料工程学院,北京 100000)
在实际应用中,将智能控制与传统PID(Proportion Integration Differentiation)控制相结合在线整定PID的参数,一般都能取得不错的控制效果[1-4]。
在无障碍升降平台的链传动系统中,存在啮合抖震、外部干扰等非线性因素[5-6],而RBF 神经网络能辨识复杂非线性时变系统并快速收敛,使得RBFPID 控制器具有在线学习系统特性的能力。因此提出一种考虑链传动动力学[7]的RBF-PID 自学习控制器,并基于Matlab/Simulink 仿真软件对该控制策略进行仿真验证。
1 机电系统建模
平台升降的工作原理:三相异步电机提供动力,圆环链轮端输入电磁转矩,带动导轨内的链条运动,扣在链条上的连接卡扣从半封闭式的导轨[8]伸出且固结在平台背板上,从而带动平台沿导轨进行升降运动。
无障碍升降平台的调速控制系统的硬件主要包括控制器PLC、变频器、三相异步交流电机和测速传感器。该控制系统以平台运行速度为控制对象,圆环链上固结平台的连接卡扣装有测速传感器用于获取平台实际运行速度,由链传动计算公式获得平台的期望目标速度,PLC 控制器根据速度误差在线整定PID 的三个参数kp、ki、kd,并向变频器输出模拟量信号,根据变频调速原理调节异步电机的速度。
1.1 电机调速系统建模
电机调速系统由三相异步电机和变频器组成。三相异步交流电机的数学模型由电力拖动系统的运动方程、电磁转矩方程、电压平衡方程、磁链方程组成[9]。
由方程联立求解,经过简化并进行拉氏变换得到三相异步电机的传递函数,可近似表示为一阶惯性环节[10],如下:
式中,Ka表示增益系数,Ta表示电机的时间常数。
在工程实际应用中,变频器一般采用恒压频比的控制方式,且变频器的传递函数可近似表示为一阶惯性环节[11-12],如下:
式中,Kb表示增益系数,Tb表示变频器的平均滞后时间。
1.2 圆环链传动系统的动力学模型
根据文献[6,13]运用有限段法将输送机的圆环链传动系统离散成一维Kelvin-Vogit 模型,建立单端驱动的圆环链传动系统的纵向动力学模型,如图1所示。

图1 圆环链传动系统离散化模型
类比重型工作面输送机的动力学模型,建立的圆环链传动系统的动力学模型如下:
式中,mi为单元i的质量;xi为单元i 的位移;ẋi为单元i的速度;ẍi为单元i的加速度;ki为单元i的刚度系数;ci为单元i的阻尼系数;fi为单元i中链条与导轨之间的摩擦力[2]。由于导轨基本处于密封润滑状态,因此fi可以忽略不计。
对各个单元进行整体分析容易得到圆环链传动系统的动力学模型如下:
式中,M为质量矩阵;C为阻尼矩阵;K为刚度矩阵;F为力向量;̈都为运动矢量。
圆环链传动的动力学方程具有非线性、时变的特性,将上述动力学方程转化成状态空间方程,基于Matlab/Simulink 建立圆环链传动的机电传动系统仿真数学模型。
1.3 链传动的机电系统模型
将RBF-PID 控制策略应用于无障碍升降平台的调速系统。RBF-PID 控制器的被控对象为由电机调速系统和圆环链传动系统组成的机电控制系统,其控制系统原理框图如图2 所示。

图2 控制系统原理框图
将平台实际运行速度v与期望目标速度vd的误差作为RBF-PID 控制器的输入信号,经过PID 参数整定,PLC 根据PID 控制策略向变频器输出模拟量控制信号,变频器在接收到给定速度控制信号后对三相异步电动机进行调速。
2 RBF神经网络控制器
2.1 RBF神经网络算法
RBF 神经网络是一种单隐层的三层前馈网络,它使用径向基函数作为隐含层神经元激活函数[14],其网络结构如图3 所示。

图3 RBF神经网络算法结构
RBF 神经网络算法的优势在于其具有快速非线性逼近能力,该网络结构的输入信号直接从输入层流入,并映射到各个隐含层,此过程实质是将低维向量映射到高维线性向量中,而输出层只是对隐含层输出进行线性加权[15-17]。
RBF 的辨识学习过程分为两个阶段:正向传播和反向迭代。
在RBF 网络结构中,设X=[x1,x2,…,xn]T为神经网络的输入层向量。
辨识网络的输出为:
辨识网络的性能指标函数为:
根据梯度下降法,输出权值、节点中心、节点基宽参数迭代算法为[18-19]:
其中,η为学习速率,α为动量因子,Jacobian 矩阵的算法为:
采用3-6-1 拓扑结构的RBF 神经网络算法,因此神经网络的节点中心矢量为3×6 的矩阵。
2.2 基于RBF神经网络的PID自整定算法
为了避免积分环节占用大量计算资源,采用增量式PID 控制算法,其控制误差为:
经过RBF 神经网络的训练学习过程,可以获得被控对象的雅可比信息
参数kp、ki、kd的在线调整采用最速下降法:
2.3 RBF神经网络的PID控制器
神经元作为构成神经网络的基本单元,具有自学习和快速逼近任何非线性函数的能力。传统的PID 控制器无法实时辨识系统状态从而进行参数的在线整定,雅可比信息表现出对非线性函数的快速辨识能力,在线调整PID 控制器的参数,使之适应被控对象参数以及结构的变化和输入参考信号的变化。这样不仅解决了非线性、耦合等复杂系统在线调参的问题,还增强了系统的鲁棒性。
无障碍升降平台的圆环链传动系统被电机调速系统驱动,圆环链传动是典型的柔性传动机构,具有非线性,因此采用RBF-PID 控制器对调速系统进行调速。RBF-PID 控制器获取控制信号u和传动链的速度输出信号yout,RBF-PID 控制器的调速控制结构如图4 所示。
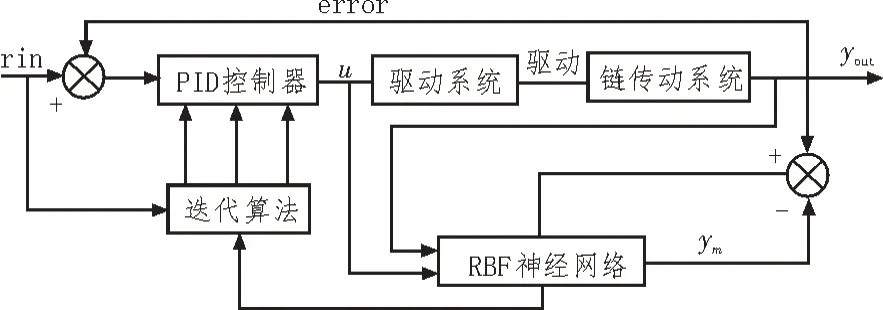
图4 RBF神经网络的PID调速控制结构图
3 仿真
为了验证该文RBF-PID 控制策略的有效性,基于Matlab/Simulink 下建立链传动机电系统的仿真模型,并在链传动空载的运行状态下进行仿真。首先对PID控制器三个参数进行工程初步整定,其中kp=5,ki=8,kd=10。
其次,初步确定RBF 神经网络相关参数,其中,初始权重W0=0.1,动量因子α0=0.05,神经网络学习速率η0=4.5,PID 参数学习速率ηPID=0.15。
3.1 单位阶跃响应
为了测试控制器的响应特性,在链传动空载的运行状态下,首先以单位阶跃信号作为输入,设置采样时间为0.001 s,仿真时间为0.5 s,仿真结果如图5所示。

图5 系统的单位阶跃响应
观察图5 可得,在单位阶跃输入的作用下,两种控制策略的速度稳态误差基本为0,并且最大超调量也都为0。显然传统PID 控制器、RBF-PID 控制器的性能良好。
为了进一步说明所用控制策略的有效性,将两种控制策略的单位阶跃响应仿真结果进行对比,如表1 所示。

表1 仿真结果对比
观察表1 和图5 得,传统PID 控制器在时间t=0.034 s 时,先 于RBF-PID 控制器0.001 s 达到幅值的90%,直至0.306 s 才达到稳定状态。RBF-PID 控制器在0.254 s 前的响应曲线一直落后于传统PID,但在0.297s 就达到了稳定状态,此结果说明了RBFPID 控制器在信号响应的最初时间段一直处于辨识系统和迭代权值的自适应学习阶段,经过一段时间的信号误差跟踪,RBF-PID 控制器能够先于传统PID 控制器达到稳定状态。根据以上结果可知,RBF-PID 除了具有自适应学习能力,能够很好地适应系统本身之外,同时也具有快速收敛性。
3.2 正弦响应
上述单位阶跃响应的仿真结果反映了RBF-PID控制器对系统的快速响应速度。为了反映出在系统长期稳定运行的时间范围内,RBF-PID 控制器相对传统PID 控制器有更好的稳态性能表现,现以正弦速度信号作为系统输入,设置仿真采样时间为0.1 s,仿真时间为200 s,在链传动空载的运行状态下,系统的正弦信号跟踪曲线如图6 所示。
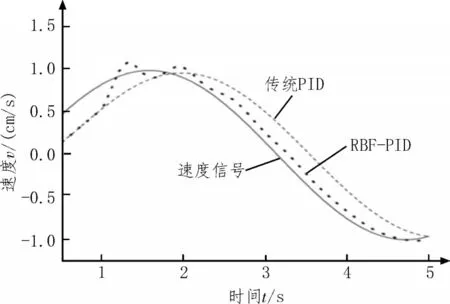
图6 系统的正弦响应
观察图6 可得,在0.5~1 s 的时间段内,RBF-PID控制与传统PID 控制有相同的速度跟踪效果;在1~2 s 的时间段内,RBF-PID 控制的跟踪曲线出现了两个波峰,经过1 s 的短暂调整之后,RBF-PID 控制器的跟踪效果优于传统PID。传统PID 控制器的最大误差为0.349,RBF-PID控制器的最大误差为0.114。
根据上述仿真结果得出:相对于传统PID 而言,RBF-PID 控制的跟踪性能较好,且具有良好的自适应学习能力。
由于仿真时间相对整个传动系统的工作寿命而言极短,RBF-PID 相对于传统PID 的速度跟踪性能的优势并不十分明显,但是结合图6 可以判断,RBFPID 控制策略具有快速自适应学习能力。
4 结论
该文建立了由三相异步电机和变频器组成的调速系统数学模型,类比输送机的动力学模型,采用牛顿-欧拉法建立了圆环链传动的动力学模型,提出一种基于RBF-PID 控制器的无障碍升降平台调速系统并基于Matlab/Simulink 对链传动机电系统进行仿真,仿真结果表明:
1)在单位阶跃输入的作用下,RBF-PID 控制器的响应速度相对于传统PID 控制器的响应速度性能提升了2.9%。
2)以正弦速度信号作为系统输入,相对于传统PID 而言,RBF-PID 控制的跟踪性能较好,最大跟踪误差下降了67.34%。
猜你喜欢
数学年刊A辑(中文版)(2022年4期)2022-02-16
黑龙江大学自然科学学报(2021年4期)2021-11-19
现代畜牧科技(2021年4期)2021-07-21
现代畜牧科技(2021年5期)2021-07-20
防爆电机(2020年3期)2020-11-06
测控技术(2018年5期)2018-12-09
数学物理学报(2018年5期)2018-11-16
天津教育·下(2018年9期)2018-07-13
电子制作(2017年7期)2017-06-05
自动化博览(2014年12期)2014-02-28
