速度350 km/h高速铁路长大下坡地段闭塞分区设置方法研究
2024-02-04 12:56:40张守帅张雨洁闫海峰田长海骆泳吉
铁道学报 2024年1期
张守帅,张雨洁,闫海峰,田长海,骆泳吉
(1.西南交通大学 交通运输与物流学院,四川 成都 611576;2.中国铁道科学研究院集团有限公司 铁道科学技术研究发展中心,北京 100081)
近年来我国中西部地区高速铁路(以下简称“高铁”)发展迅速,西成高铁、成贵高铁等骨干线路相继通车,同时中西部地区高铁的建设标准也越来越高,成渝高铁提速后运行速度达350 km/h,未来还将有大量设计速度为350 km/h的高铁开通,如渝昆高铁、成自高铁、成达万高铁、西渝高铁等。中西部地区高铁线路条件更为复杂,其最主要的特点是具有较多长大下坡道。动车组列车在长大下坡道运行时,由于重力沿列车运行方向的分力作用以及列控系统的冗余处理,导致其车载监控制动距离大大延长,进而在设计阶段影响到闭塞分区长度,且在运营阶段给列车运行速度、追踪间隔时间带来不利影响。
针对闭塞分区的设置问题,近年来国外专家已取得诸多成果。Hua[1]将高速铁路闭塞分区划分问题抽象为多目标优化模型,并采用混沌粒子群算法进行求解。Egidio[2]结合追踪间隔时间和运营成本,通过设计列车运行仿真系统,对闭塞分区布局进行优化。Burdett[3]从数学模型角度分别以通过能力最大、建设成本最小为目标优化铁路闭塞分区布置并求解。Gao等[4]设计了基于牵引计算的高铁闭塞分区划分软件,在保证行车安全的同时提高通过能力。然而,由于国内外运营设备和线路设计情况不同,国外学者大多未综合考虑列控模式与线路纵断面因素,如坡度、曲线等对闭塞分区划分的影响。
国内方面,高国隆等[5]利用遗传算法对长大下坡道条件下高速铁路区间闭塞分区分界点位置进行优化,在不改变信号机个数的情况下提高线路通过能力。王杰[6]重点研究长大下坡地段不同车载设备下的列车制动距离及追踪间隔,通过优化闭塞分区长度和列控车载设备参数等措施,有效提升运输效率。另外,文献[7-9]针对CTCS-2级列控系统、200~250 km/h速度级高铁在长大下坡地段列车运行相关问题也进行了研究。但目前尚未有人提出在长大下坡地段设置闭塞分区时,综合考虑CTCS-3级和后备CTCS-2级2种列控系统分别对列车运行安全及行车密度、速度的约束影响。
随着列车在长大下坡道制动距离的增加,后备CTCS-2级列控系统要求闭塞分区长度较长,如在原设计郑万高铁兴山站—巴东北站间连续14.4 km坡度-30‰的长大下坡道中,部分闭塞分区长度甚至达到了5.75 km。但当列车在类似地段以CTCS-3级模式运行时,出现了行车许可突然回缩并引发列车紧急制动的问题。综上,在长大下坡地段,如何合理设置闭塞分区,以兼顾CTCS-3级和CTCS-2级模式下的列车运行速度,成为亟待解决的现实问题。
1 闭塞分区对列车运行速度的影响分析
高速列车采用目标-距离连续速度控制模式监控列车运行,前后两列高速列车追踪运行示意见图1。图1中,L附加为附加时间范围内列车运行距离;L制为车载监控制动距离;L防为安全防护距离;L闭为闭塞分区长度;L列为列车长度。在完全监控模式下,后行列车以行车许可终点为追踪目标点计算出监控速度曲线,列车实际运行速度不得超过监控速度曲线[8]。
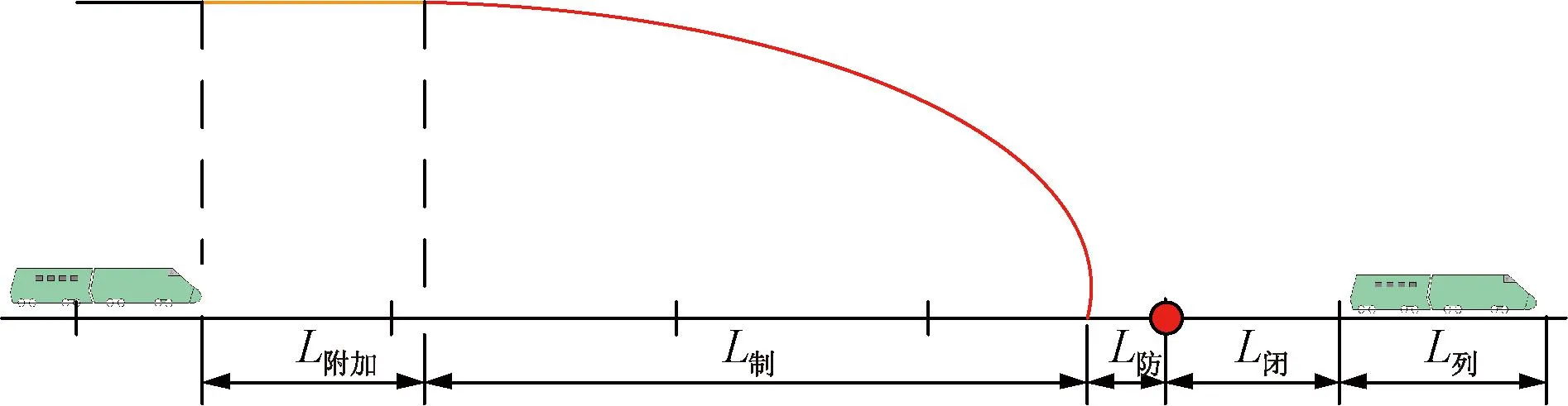
图1 高速列车追踪运行示意(单位:m)
CTCS-3级控车模式的行车许可生成方式与后备CTCS-2级不同,导致列车在不同模式下的允许运行速度也不同,下面分别对2种控车模式的运行场景进行分析。
1.1 CTCS-3级模式下列车运行速度
在CTCS-3级列控系统中,行车许可由RBC根据前方32 km内线路空闲情况计算确定,并通过GSM-R无线网络传输到列控车载设备中,车载设备依照接收到的行车许可实时生成目标-距离速度控制曲线实现安全控制。为避免黑客和病毒恶意破坏干扰GSM-R网络,向车载设备发送错误的行车许可,影响列车运行安全[10],原中国铁路总公司研究并下发了TJ/DW 200—2018《CTCS-3级ATP行车许可结合轨道电路信息暂行技术条件》[11],提出将CTCS-3级ATP行车许可与轨道电路信息结合在一起,在进一步完善提高CTCS-3级系统安全性的同时,也有效实现CTCS-3级系统与CTCS-2级系统的资源整合。
(1)

(2)
(3)
式中:n为列车当前所在闭塞分区编号;Gn为第n个闭塞分区坡度;Ln为第n个闭塞分区长度。
(4)

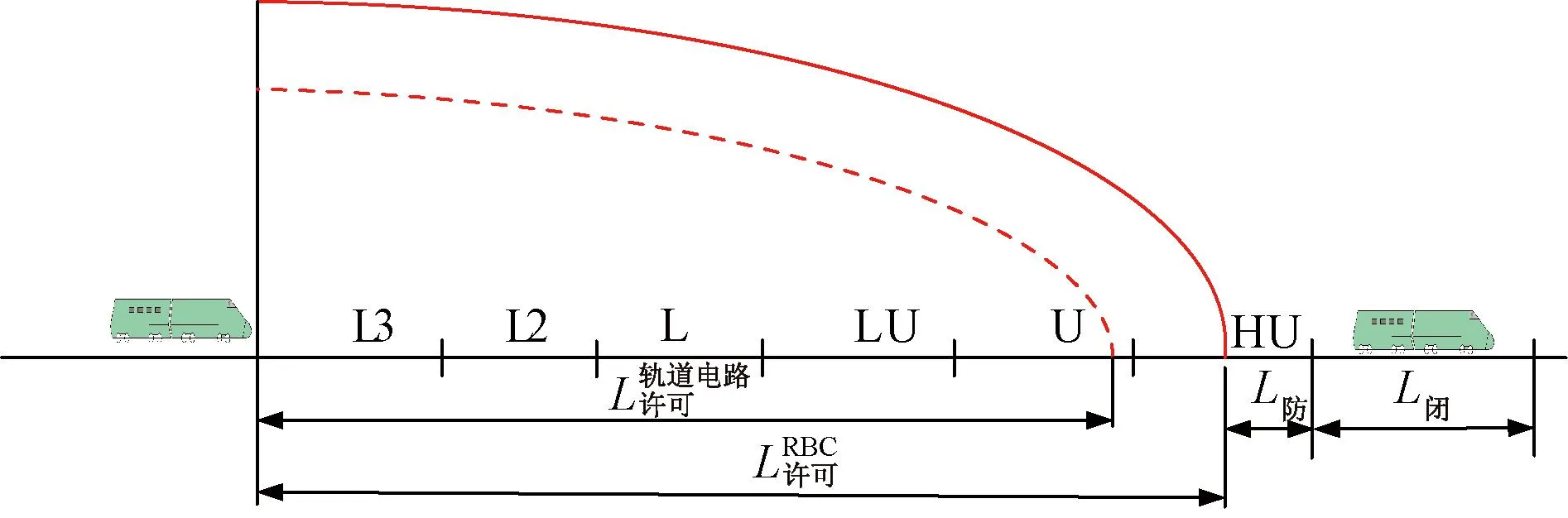
图2 CTCS-3级行车许可回缩场景示意




1.2 CTCS-2级模式下列车运行速度
列车以后备的CTCS-2级模式运行时,根据轨道电路的发码信息判断前方空闲情况,且最多接收到L5码,即列车最多只能获取前方7个闭塞分区的空闲情况[3]。若前方7个闭塞分区的长度之和小于车载监控制动距离,即便前方有更长的空闲区间,列车也无法实现后备CTCS-2级的最高速度。因此闭塞分区长度应满足

(5)

2 各要素之间的关系分析
2.1 长大下坡道列车运行各要素的关系
在长大下坡道列车运行各要素中,线路坡度、动车组性能、列控系统是基础,闭塞分区长度取值是关键,实现列车按线路允许速度运行并保证追踪间隔时间在合理范围内是目的,其中保证动车组列车在CTCS-3级列控系统下可按正常速度运行是最基本目标。
长大下坡地段,坡度会大大增加动车组的车载监控制动距离[12]。不同型号动车组的制动性能不同,不同列控系统的控车曲线计算方法以及对坡度的处理方法也不同,这都会影响到车载监控制动距离。闭塞分区长度影响列车运行速度,当闭塞分区较短,与车载监控制动距离的关系不满足式( 5 )时,会导致列车在CTCS-2级模式下的运行速度受限;但闭塞分区较长,又有可能导致列车在CTCS-3级模式下发生行车许可回缩并触发紧急制动的问题。车载监控制动距离、闭塞分区长度、列车运行速度都会影响列车的追踪间隔时间。
2.2 闭塞分区设置优化原则
从列车运行速度的角度,CTCS-3、CTCS-2级列控系统对闭塞分区长度的要求是相反的:在一定范围内,闭塞分区越长,对CTCS-2级列控模式下的运行速度越有利;闭塞分区越短,对CTCS-3级列控模式下的运行速度越有利。为权衡列车速度与行车密度,同时兼顾不同车型、不同列控模式下的运行需要,本文提出以下闭塞分区设置原则,各原则的优先级逐次降低。
原则1确保所有车型在CTCS-3级列控模式下的正常运行。考虑到速度为350 km/h高速铁路上的列车日常以CTCS-3级列控模式运行,只有少量情况下才降级为后备的CTCS-2级模式,因此应当尽量保证CTCS-3级列控模式下行车许可不回缩,运行速度不突降。由于我国高速铁路存在大量跨线列车,因此线路上闭塞分区的设置必须能够满足所有车型在CTCS-3级列控模式下的运行需要。
原则2尽量保证CTCS-2级列控系统下的正常运行速度。当线路或列车的列控设备发生故障时,列车会降级运行,闭塞分区设置应能尽量保证常用车型在CTCS-2级列控系统下按速度300 km/h运行而不受影响[13]。但当因CTCS-3级列控系统对闭塞分区长度的要求导致无法兼顾CTCS-2级列控系统时,可在线路上设置限速以保证在CTCS-2级列控模式下不会因行车许可超出前方7个闭塞分区长度而导致速度突降,当然此时应尽量保证较高的限速值。
原则3兼顾动车组反向运行需要。若闭塞分区设置过短,则当列车在该线路反向运行(上坡)时,也会存在制动距离不够的情况。
原则4尽量压缩追踪间隔时间。我国高速铁路的追踪间隔时间普遍为5 min,部分线路可实现3~4 min[14-15]。闭塞分区长度不仅会直接影响追踪间隔时间,还会通过影响列车运行速度进而间接影响追踪间隔时间,因此追踪间隔时间与闭塞分区的关系较为复杂,考虑到列车在下坡道的制动距离较长,因此其追踪间隔时间主要取决于车载监控制动距离,闭塞分区长度属次要因素。
以上原则中,原则1要求闭塞分区长度越短越好,原则2和原则3要求闭塞分区长度越长越好,由于列车在下坡时的制动距离远长于反向运行上坡,因此若满足原则2则基本就满足了原则3,若原则1~原则3均满足,则以原则4为原则进行优化。
结合上文分析得出的闭塞分区设置优化原则,建立长大下坡地段闭塞分区优化模型:选取信号机的坐标位置为决策变量,两信号机间的距离即闭塞分区长度为中间变量;满足所有车型均能于CTCS-3级列控模式下正常运行(运行速度不突降)为硬性约束,列车在CTCS-2级列控系统下的限制速度值最大为目标函数,优化目标为限制速度值越高越好。
3 典型坡度下闭塞分区取值与各要素的关系分析
按照上述优化原则,对典型坡度下闭塞分区取值及各要素的关系进行分析,一方面可对现场设计工作提供取值建议,另一方面可掌握闭塞分区取值与各要素的变化规律,为后续相关算法的优化提供基础。
不同型号的动车组制动能力不同,进而对闭塞分区的长度要求也不同。现场一般按照车载监控制动距离最长的动车组型号来设置闭塞分区。本文以常见的CRH380BL型及制动力相对较差的CRH380BK型2款动车组为例(均装备CTCS3-300T列控系统),分析坡度、闭塞分区长度、车型等与列车运行速度、追踪间隔时间的关系,其中车载监控制动距离相关数据均来自列控厂家[8]。
3.1 满足正常运行速度
1)满足CTCS-3级正常运行速度

表1 CTCS-3模式下CRH380BL闭塞分区长度需求(制动初速度350 km/h) m

表2 CTCS-3模式下CRH380BK闭塞分区长度需求(制动初速度350 km/h) m
由表1可知,CRH380BL以速度为350 km/h在-20‰~-30‰的长大下坡道运行时,接收到L3码时估算的轨道电路信息许可始终大于车载监控制动距离,此时从CTCS-3的角度对闭塞分区长度无要求;接收到L2~LU时估算的轨道电路信息许可小于车载监控制动距离,闭塞分区长度有上限要求。由表2可知,CRH380BK在-20‰~-30‰的长大下坡道运行时,接收到L3~LU时估算的轨道电路信息许可均小于车载监控制动距离,闭塞分区长度均有上限要求。
2)满足后备CTCS-2级正常运行速度
2款动车组在采用后备的CTCS-2级列控系统时,闭塞分区的设置应能满足其以速度300 km/h运行的需要。由式( 5 )可知CTCS-2级列控系统对闭塞分区长度有下限要求,见表3。
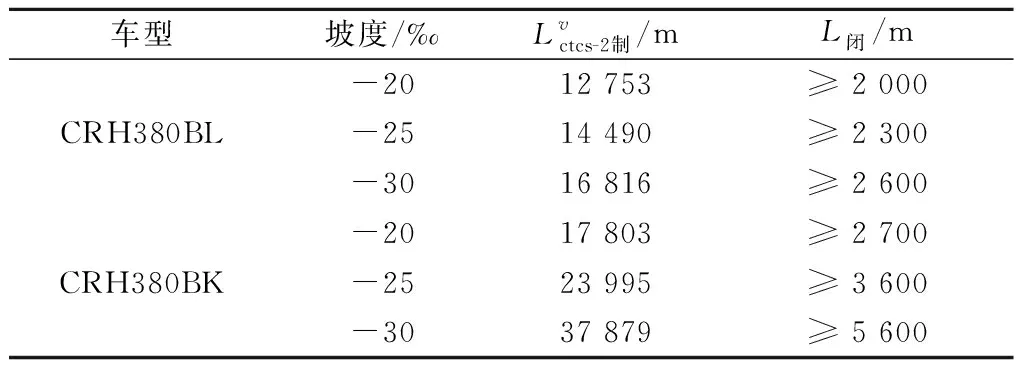
表3 CTCS-2模式下闭塞分区长度要求(速度300 km/h)
由表3可知,不同型号的动车组在不同坡度下,其对闭塞分区长度的要求不同。制动能力越差、下坡的坡度越大,要求闭塞分区越长。若要满足CRH380BK以速度300 km/h在-30‰的长大坡道上运行的需求,闭塞分区的平均长度要达到5 600 m。
由于闭塞分区的设置应当尽量兼顾不同型号列车,同时兼顾CTCS-3级和后备CTCS-2级模式下的运行要求,因此将CRH380BL、CRH380BK在CTCS-2、CTCS-3级模式下分别对闭塞分区长度的下、上限要求统一考虑。CRH380BL和CRH380BK在不同列控模式下的闭塞分区长度限制见图3。
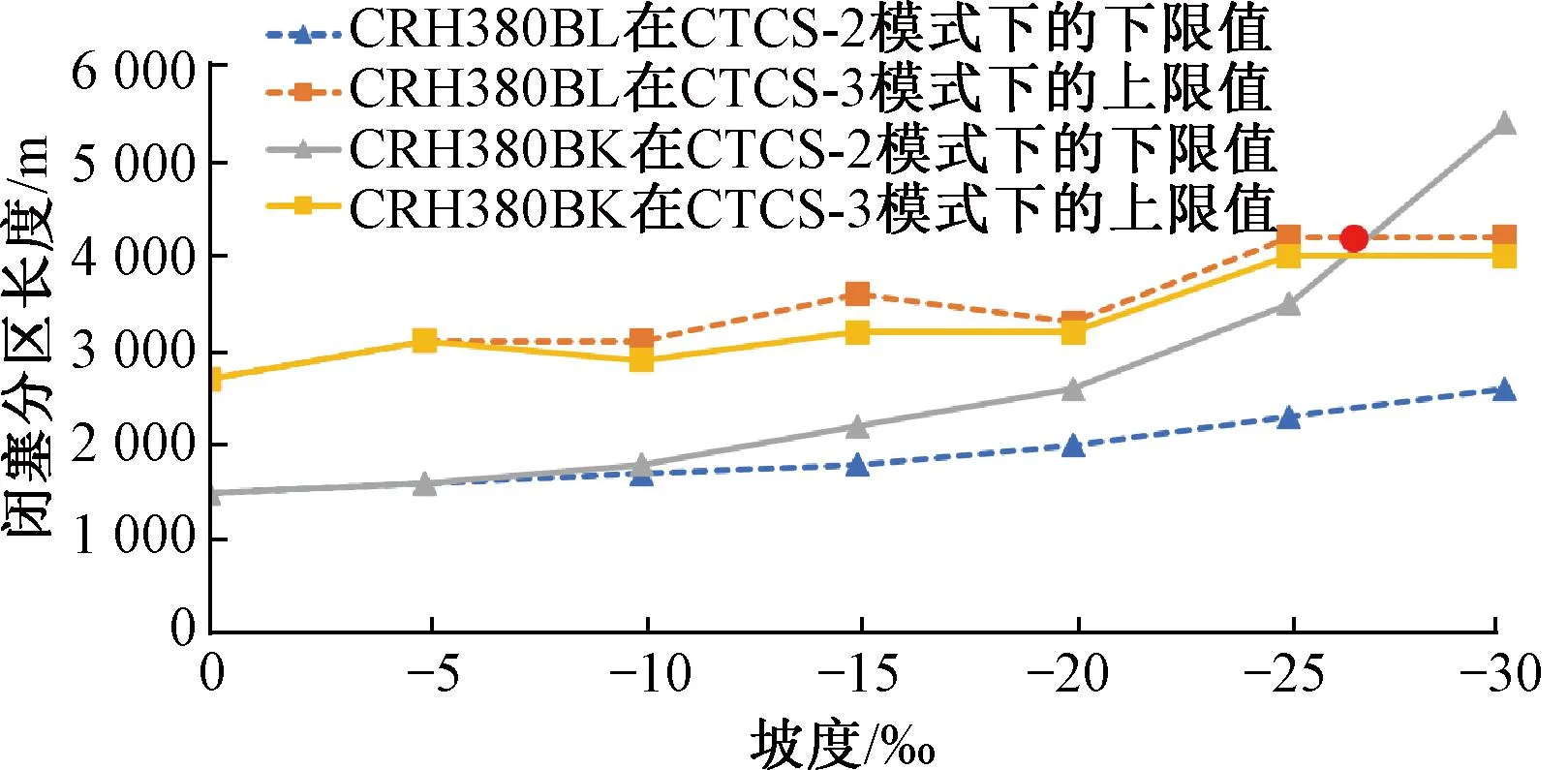
图3 CRH380BL和CRH380BK在不同列控模式下的闭塞分区长度限制
由图3可见,随着坡度的增加,CTCS-3级列控系统闭塞分区上限值和CTCS-2级列控系统闭塞分区下限值均越来越高,上、下限之间的范围可同时满足原则1~原则3;但随着坡度的增大,上、下限构成的可行域越来越小,甚至由于制动能力相对较差的CRH380BK对闭塞分区上、下限的要求均更为严苛,在超过-25‰的坡度时已经无法兼顾CTCS-2、CTCS-3级模式下正常运行的需要。因此,在后续算法中,只需检算制动力最差车型即可;CTCS-2、CTCS-3级列控系统需要的上、下限存在可行解时,应取CTCS-2级列控系统的下限值,以尽量实现更小的追踪间隔时间;当不存在可行解时,应取CTCS-3级列控系统的上限值,这样即满足CTCS-3模式下正常运行的需求,又将闭塞分区设置的尽可能长,以使得CTCS-2级模式下限速值较高。
3.2 不同闭塞分区长度下的追踪间隔时间
根据上文计算出的可确保列车不同模式下运行速度的闭塞分区合理取值区间,分别计算其追踪间隔时间[9],以分析坡度对追踪间隔时间的影响。最不利车型CRH380BK不同闭塞分区的追踪间隔时间I追计算结果见表4。
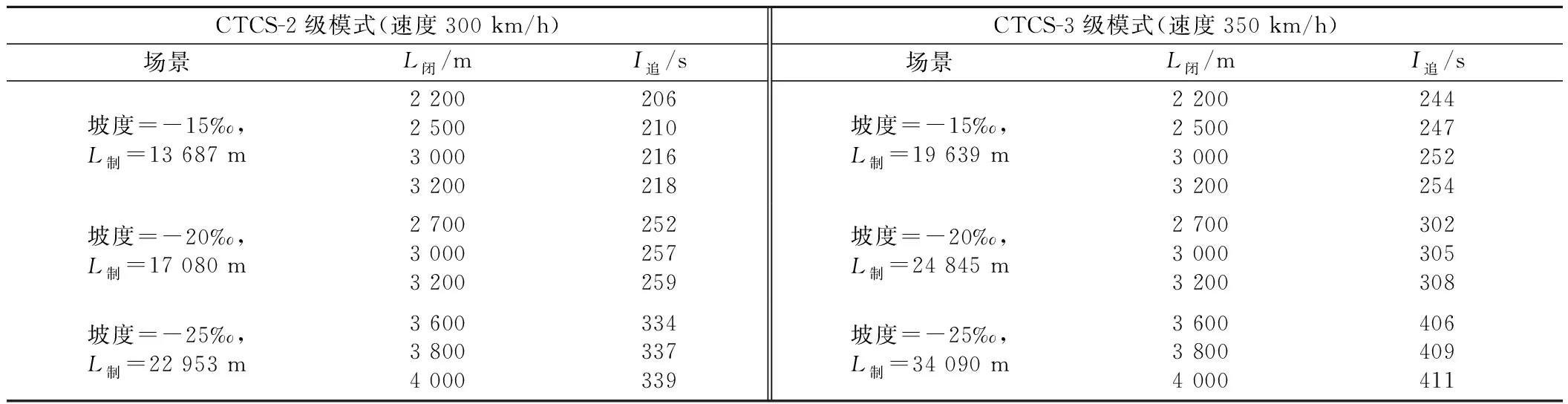
表4 CRH380BK车型不同闭塞分区的追踪间隔时间
由表4可见,CRH380BK在CTCS-3级模式下,坡度在-20‰以内时,追踪间隔基本可实现5 min;在CTCS-2级模式下,坡度在-25‰以内时,追踪间隔可实现5.5 min。
由于CRH380BK在-30‰的坡道运行时已不存在可行解,因此闭塞分区设置时应当以满足CTCS-3级列车正常运行为前提,尽量兼顾CTCS-2级列车运行需求,即闭塞分区长度选择4 000 m。此时CRH380BK可在CTCS-3级模式下正常运行,追踪间隔为637 s,已超过10 min;在CTCS-2级模式下,列车需限速270 km/h运行,追踪间隔为409 s,接近7 min。
可见,坡度对列车追踪间隔时间影响极大,尤其是超过-20‰后追踪间隔时间急剧上升,部分场景下甚至超过10 min,必然成为全线能力瓶颈。相比之下闭塞分区长度对追踪间隔时间的影响较小。
4 长大下坡道闭塞分区优化设置算法
在实际线路中,坡度随里程而变化,且各闭塞分区长度之和还需满足区间长度等限制,导致闭塞分区的潜在方案极多,需借助启发式算法进行求解。此外,根据前文提出的闭塞分区设置原则以及典型坡度下检算掌握的规律,可对闭塞分区设置的算法进行优化,提高检算效率。
4.1 模拟退火算法设计
传统的闭塞分区设置方法是对各闭塞分区逐个检算其能否满足列车正常运行时制动距离的需求。但轨道电路信息许可结合RBC行车许可后,对每个闭塞分区还需检算其能否满足CTCS-3级模式下接收到不同轨道电路发码时列车正常运行的需求,每次检算都涉及不同轨道电路码序的场景,检算结果还需测算CTCS-2级模式下的限速值,可见问题规模已远大于传统闭塞分区设置优化问题的规模。因此,有必要设计一种可提高检算优化效率、嵌套检算环节计算的优化算法。
模拟退火算法是一种可随机寻找目标函数全局最优解的串行结构启发式算法,且在搜索中结合概率突跳特性,可避免陷入局部最优解。嵌套列车在该闭塞分区设计方案下的检算模块,应涉及列车在接收L3~LU码时,对CTCS-3级列控模式下行车许可不回缩、运行速度不突降约束的检算,以及对CTCS-2级模式下限速值的测算。为进一步压缩求解空间,提高求解效率,提出以下优化策略:
1)考虑到实际闭塞分区长度及轨道电路长度的限制,合理设置闭塞分区上下限。
2)根据前文分析,最不利车型对CTCS-2、CTCS-3级模式下的上下限要求更为严苛,因此只需考虑最不利车型即可。
3)无论是否存在可行解,合理的闭塞分区长度取值均为CTCS-2、CTCS-3级模式对应上下限的最小值,因此本算法从闭塞分区长度最短、个数最多的场景开始优化,这样优化出的结果为最优解的概率较大。
5)CTCS-3级模式下RBC行车许可长度大于轨道电路信息许可长度,且持续5 s后,才会将RBC行车许可向轨道电路信息许可回缩。其本质是5 s的冗余时间,以等待前一列车出清前方闭塞分区,使后方列车的RBC行车许可和轨道电路信息许可再次更新,降低行车许可回缩的频率。但若5 s内2个许可都发生了更新,则相当于新码序的场景。由于本文的检算方法已经对任一闭塞分区全部可能出现的轨道信息码均进行检算,且各码序下均不允许出现行车许可回缩或突然降速的情况,因此该5 s冗余可不予考虑。
4.2 算法流程
在长大下坡地段闭塞分区优化问题中,选取信号机的坐标位置为决策变量,两信号机间的距离为闭塞分区长度。
1)输入、输出参数
输入参数:线路条件,闭塞分区的最大、最小长度范围,列车长度,在不同速度坡度下的车载监控制动距离表,不同控车模式下最大运行速度,区间安全防护距离,区间运行附加时间,以及模拟退火算法中涉及到的相关参数等。
输出参数:经全局优化后的闭塞分区划分方案及该方案在CTCS-2级控车模式下的限速值。
2)算法步骤
Step1输入相关数据。

Step4设置模拟退火算法的控制参数,包括初始温度T0、终止温度TZ、降温系数α、内循环迭代次数L,并令当前温度为T=T0、当前内循环次数l=0。
Step5对本次生成的闭塞分区解方案进行检算。列车位置S自区间起点开始,至最后一架信号机结束,以变坡点和信号机为检算点,逐个检算。



Step5.4检验当前闭塞分区设置方案是否满足CTCS-2级控车模式下的正常运行要求,若满足则转Step5.5;若不满足,则重新根据CTCS-2级列控模式下的相关制动数据推算该位置限速值。
Step5.5更新列车位置至下一临近信号机位置,并转入Step5.1;若下一位置为检算结束点,则转Step 5.6。
Step5.6将计算得到的全部CTCS-2级控车模式下限速值的最小值记为当前闭塞分区设置方案下限速值,然后转入Step6。
Step6利用Metropolis准则判断是否接收新解。比较仿真中计算出的CTCS-2级列控限速值,并选取其中最低值作为该闭塞分区设计方案下的限速值obj(Ic)。计算Δobj=obj(Ih)-obj(Ic)得到目标增量,其中Ih为历史最优的闭塞分区设计方案,Ic为当前闭塞分区的设置方案。若目标增量Δobj小于0,则接收当前解obj(Ih)=obj(Ic),否则在(0,1)中产生随机数ε,并判断是否满足exp(Δobj/T)>ε条件,若满足则接受当前闭塞分区划分方案。
Step7内循环检查更新。若l Step8随机扰动产生新解。即从m个闭塞分区中随机选出p(1≤p≤m)个进行随机扰动。考虑到线路长度固定,故在变化过程中要保证总增大值与总减小值之和为0,且变化幅度随温度降低而变小。对新解进行边界处理和可行性判别调整后,转入Step5。 Step9外循环(温度)检查更新。若T>TZ,则设置T=α×TZ后转入Step8;否则转Step10。 郑万高铁湖北段线路总长287 km,设计行车速度为350 km/h,是我国“八纵八横”高速铁路网重要组成部分。巴东北站至兴山站间上行方向存在14.3 km、坡度为-30‰的长大下坡道,其线路条件及初始信号机布置见图4。图4中,考虑到CRH380BK以CTCS-2级模式运行的需要,连续几个闭塞分区的长度区间均设计为3.9~5.75 km。 图4 郑万高铁长大下坡地段示意(巴东北站至兴山站间) 列控厂家对线路进行详细仿真时发现,若兴山北站上行方向有列车刚出清一离去,后续列车在进入该坡道前的K599+744信号机所防护的闭塞分区时将接收到L3码,如图4所示,此时列车前方平均坡度为-19.02‰,对应轨道电路信息许可长度为19 200 m,但实际RBC行车许可长度为25 025 m,导致后车行车许可突然回缩,列车进入紧急制动。因此该闭塞分区设计方案需重新调整。 针对上述问题,设计院重新调整了该区间的闭塞分区,优化后的闭塞分区设置方案见图5。该方案可以保证列车在CTCS-3级模式下以速度350 km/h正常运行,避免了允许速度突降的情况。 图5 设计院调整优化后的闭塞分区设置方案 在不改变原设计中兴山站进出站信号机位置的前提下,采用本文算法进行计算,优化后的信号机设置方案见图6。 图6 本文优化后的闭塞分区设置方案 由图6可知,与优化前闭塞分区方案相比,本文方案中闭塞分区长度值普遍降低,列车在CTCS-3级模式下可以350 km/h的速度正常运行,避免了行车许可回缩导致紧急制动的问题;在不考虑其他约束的前提下,与设计院给出的优化方案相比,本方案在保证CTCS-3级允许速度不降的同时,提高了CTCS-2级模式下的运行速度,并将追踪间隔时间压缩到320 s。闭塞分区优化前后方案参数对比见表5。 表5 闭塞分区优化前后方案参数对比 本文研究了闭塞分区长度对CTCS-3级列控系统和后备CTCS-2级列控系统的影响,对行车许可回缩、速度突降等产生的原因进行了分析,检算不同车型在典型坡度下的闭塞分区取值范围,得出以下结论: 1)当坡度超过-30‰后将无法同时满足CTCS-2、CTCS-3级列控系统按正常速度运行的要求,且CTCS-3级模式下的追踪间隔时间将超过10 min。 2)对现场闭塞分区的设置给出建议值:在-20‰的坡道上,闭塞分区长度建议取2 700 m;在-25‰的坡道上,闭塞分区长度建议取3 600 m;在-30‰的坡道上,闭塞分区长度建议取2 600 m。 3)考虑到实际线路上坡度不断变化导致的复杂性,本研究还结合闭塞分区设置原则,设计了模拟退火算法,应用该算法对郑万高铁进行实例计算。 需要注意的是,本文在对闭塞分区设置进行优化时,仅从运输组织的角度进行考虑,除此之外还有诸多因素如信号机应与接触网立柱相对应、与电分相保持一定距离、列车在长大坡道可顺利起停等情况,应在实际设计中协同考虑。
5 长大下坡道闭塞分区设置实例计算
5.1 郑万高铁长大下坡地段基本情况


5.2 本文优化结果


6 结论
猜你喜欢
铁路计算机应用(2024年4期)2024-05-07 07:44:06
铁道运输与经济(2022年7期)2022-07-12 08:11:18
文萃报·周二版(2022年23期)2022-06-11 20:55:46
铁道通信信号(2020年1期)2020-09-21 08:54:42
通信电源技术(2020年10期)2020-08-19 03:23:20
中国交通信息化(2019年9期)2019-11-16 09:22:38
铁道标准设计(2019年10期)2019-10-11 03:36:36
铁道通信信号(2019年2期)2019-03-26 06:39:38
铁道通信信号(2018年9期)2018-11-10 03:26:40
铁道通信信号(2018年7期)2018-08-29 01:17:02