基于混合储能系统的电动汽车动态功率跟踪控制*
2023-12-29 13:45金炜彬高妍张红娟
汽车技术 2023年12期
金炜彬 高妍 张红娟
(太原理工大学,太原 030024)
主题词:混合储能 动态功率跟踪 制动能量
1 前言
近年来,混合储能系统因具有大功率和长循环寿命等优势,在电动汽车领域得到了较为广泛的应用[1-3]。
电动汽车混合储能系统的制动能量管理策略可分为基于规则的能量管理策略和基于优化的能量管理策略[4]。基于规则的能量管理策略较为简单且易于实现。文献[5]提出了一种基于规则的小波变换控制策略,其中高频分量电源和低频分量电源分别分配给超级电容和电池或电网。文献[6]提出了一种基于规则的功率分配策略,能量利用效率显著提高。基于优化的能量管理策略通常更加复杂、高效,对系统动态性能要求也更高。文献[7]提出了基于动态比例分配的控制策略,降低了无功功率补偿的成本,具有较好的经济性。文献[8]提出了一种多目标优化的能量管理策略,使电池寿命延长60%以上。上述制动能量管理策略中多次提出了对电机制动功率进行动态跟踪的要求,因此,如何精确跟踪电机制动功率仍值得深入研究。
制动能量管理策略相关文献大多采用Rint 模型对超级电容进行建模,但该模型没有考虑极化效应,且动态性能较差[9]。为了准确跟踪电机制动功率,本文采用戴维南(Thevenin)模型[10]对超级电容进行建模,设计基于卡尔曼滤波的状态观测器实时预测超级电容的电压,并以跟踪电机制动功率为目标建立损失函数,实时控制超级电容的充电功率。最后,通过试验验证所提出控制策略的有效性。
2 系统结构
混合储能系统结构如图1所示,该系统由电机驱动系统、双向DC/DC 电源变换器、超级电容、蓄电池、整流器和动态功率跟踪控制单元组成:电机驱动系统由变频器和永磁同步电机组成,负责模拟电动汽车的驱动工况和制动工况;双向DC/DC 电源变换器负责控制超级电容和蓄电池的充放电状态;超级电容和蓄电池共同组成混合储能系统,负责对再生制动能量进行回收再利用;直流母线上并联的电容为稳压电容;动态功率跟踪控制单元主要负责采集系统参数并计算超级电容和蓄电池的充放电电流参考值。
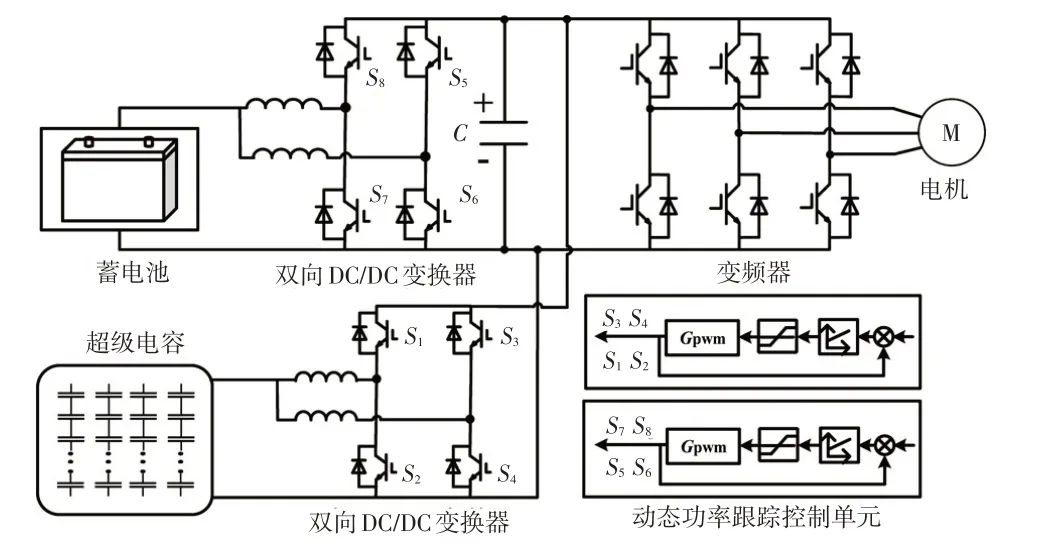
图1 混合储能系统结构框图
3 动态功率跟踪控制策略
为了精确跟踪电机制动功率,本文提出一种基于混合储能系统的动态功率跟踪控制策略,如图2所示。通过Thevenin模型对超级电容进行建模,利用卡尔曼滤波对超级电容端电压进行预测,并将预测值输入超级电容荷电状态(State of Charge,SOC)预测单元和双向DC/DC电源变换器效率计算单元,对超级电容SOC进行预测并对双向DC/DC 电源变换器的效率进行实时计算。利用电机功率的变化率对电机功率进行预测。基于上述各单元计算结果,以跟踪电机制动功率为目标建立损失函数,以超级电容SOC 预测值为约束条件求解损失函数,得到超级电容充电电流参考值,并将相应的开关状态作用于双向DC/DC 电源变换器,实现超级电容充电功率对电机制动功率的动态跟踪。
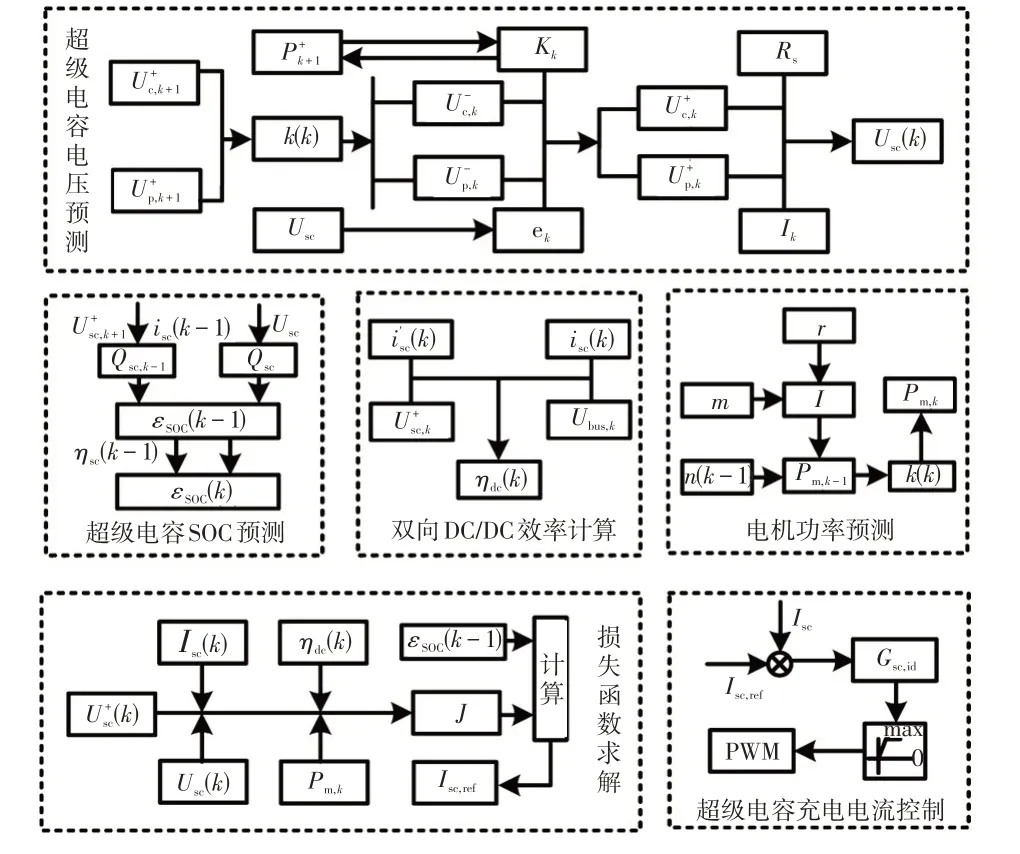
图2 动态功率跟踪控制策略
超级电容的Thevenin模型如图3所示。其中,Uc、Up分别为主电容C、极化电容Cp上的电压,Rp为极化电阻,Rs为超级电容的等效串联电阻,Usc、isc分别为超级电容的端电压、电流。
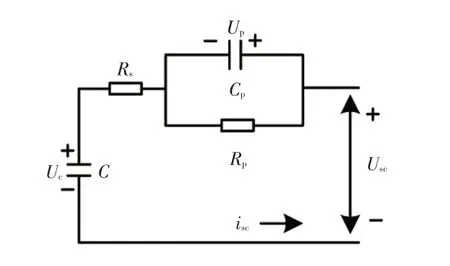
图3 超级电容Thevenin模型
根据上述模型设计了基于卡尔曼滤波的状态观测器,系统方程为:
式中,Ts为采样时间;分别为(k-1)时刻主电容电压、极化电容电压的后验估计;分别为k时刻主电容电压、极化电容电压的先验估计;ωk、υk分别为k时刻的过程噪声矩阵、测量噪声矩阵;为k时刻超级电容端电压的先验估计;isc(k)为超级电容端电流在k时刻的测量值。
k时刻误差协方差矩阵的先验估计为:
式中,Qk-1为(k-1)时刻的过程噪声ωk-1的协方差矩阵;A为状态转移矩阵;为(k-1)时刻误差协方差矩阵的后验估计。
k时刻的卡尔曼增益为:
式中,H为测量矩阵;Rk为k时刻测量噪声的误差协方差矩阵。
k时刻误差协方差矩阵的后验估计为:
式中,E为单位矩阵。
超级电容主电容电压和极化电容电压在k时刻的后验估计为:
式中,Usc(k)为超级电容端电压在k时刻的测量值;e(k)为超级电容端电压的测量值与其先验估计的差值。
超级电容端电压在k时刻的后验估计为:
电机能量Em的计算公式为:
式中,I为电机的转动惯量;n为电机的转速;t为电机工作时间。
因此,电机传输到直流母线的功率为:
电机预测功率可表示为:
双向DC/DC电源变换器在k时刻的效率为:
式中,Ubus,k为k时刻的母线电压值。
其中,超级电容端电压预测值和测量值的权重为通过试验获得的经验参数。
为了避免储能元件过度充放电,超级电容SOC范围设置为45%~95%。超级电容SOC预测值计算如下:
式中,εsoc为超级电容SOC值;Usc,max为超级电容电压额定值;Qsc,k为超级电容在k时刻储存的能量;Qsc为超级电容能够储存能量的最大值,由超级电容额定电压决定;ηsc(k-1)为超级电容在(k-1)时刻的充放电效率。
为了实现超级电容对电机制动功率的动态跟踪,本文构造一个损失函数用于确定超级电容的充电电流。损失函数可以定义为:
式中,Psc(k)为超级电容功率;r为采样数量;ηinv(k)为变频器工作在整流模式的效率;ηdc(k)为双向DC/DC 电源变换器的效率;α∈[0,1]为权重参数,当需要超级电容吸收全部制动功率时,设α=1。
损失函数的第1 部分用于实现对电机制动功率的实时跟踪,第2部分用于限制超级电容端电压预测值与测量值之间的误差。建立损失函数后,在上述约束条件内获得最小损失函数相对应的超级电容参考电流。最后,通过控制双向DC/DC 电源变换器使超级电容工作在参考电流范围内。
4 试验结果与分析
为了验证所提出的动态功率跟踪控制策略的有效性,建立了混合储能系统试验平台,该平台用于模拟制动工况下电动汽车混合储能系统的能量循环。试验平台中参数设置如表1所示。
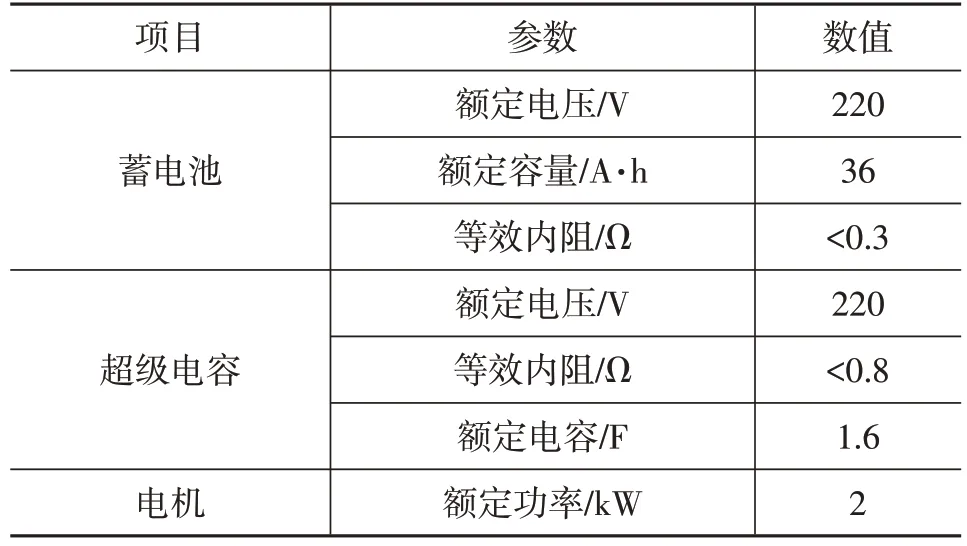
表1 试验平台参数
根据系统中各元件的特性,直流母线的正常工作电压在500~600 V范围内。经过试验测定,最终选择将直流母线的最低工作电压设定为510 V,最高工作电压设定为590 V。电机的需求功率曲线如图4所示。在所设计的操作循环中,驱动工况下,电机的功率均设定为600 W。制动工况下,为了模拟不同制动强度并进一步验证控制策略的功率跟踪效果,设计了2种不同的制动功率,第1次制动设定在第20~50 s之间,制动功率设为400 W,第2 次制动设定在第100~140 s 之间,制动功率设定为600 W。
分别采用所提出的动态功率跟踪控制策略与双闭环控制策略进行对比试验。驱动工况下,双闭环控制策略和动态功率跟踪控制策略下的超级电容放电电流均设定为1.5 A。制动工况下采用超级电容充电功率跟踪电机制动功率,即损失函数中α=1。由于蓄电池功率为电机制动功率和超级电容充电功率的差值且蓄电池电压波动较小,因此可以采用制动工况下的蓄电池电流表征相应控制策略中超级电容充电功率对电机制动功率的跟踪效果。制动工况下,蓄电池的电流越小,相应控制策略中超级电容充电功率对电机制动功率的跟踪效果越好。
在本文的对比试验中,制动工况下,采用双闭环控制策略的系统中超级电容充电电流参考值设定为:
基于双闭环控制策略的系统中超级电容电压及电流波形如图5所示。第1次制动期间,超级电容的充电电流冲击为4.77 A,超级电容端电压从103 V 上升到160 V,提高了57 V。第2次制动期间,超级电容的充电电流冲击为6.12 A,超级电容端电压从108 V 上升到194 V,提高了86 V。驱动工况期间,超级电容放电初期的放电电流冲击分别为3.40 A和4.02 A。在电机工况切换时,采用双闭环控制的系统中存在较大的超级电容充放电电流冲击,这会对系统中的元器件产生负面影响。
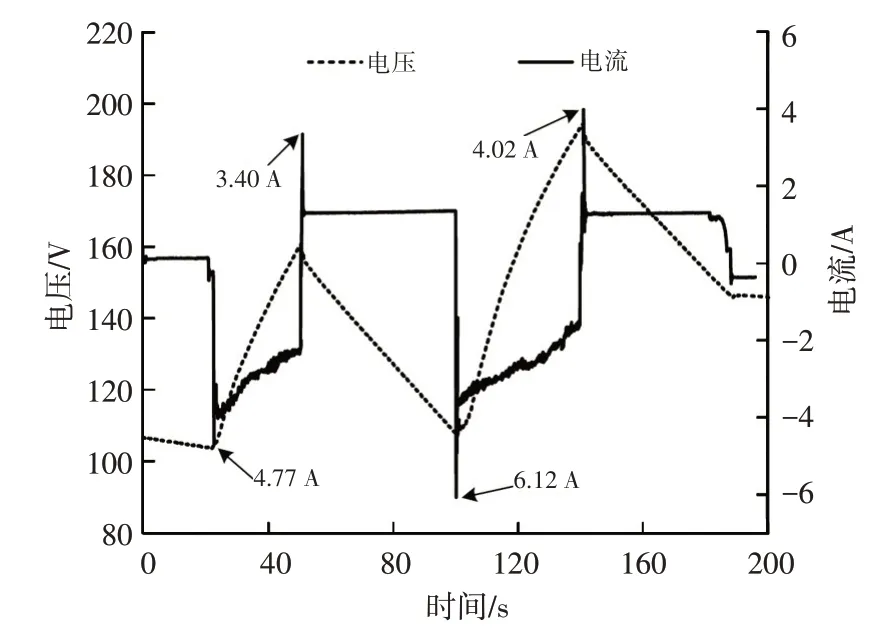
图5 双闭环控制下的超级电容电压和电流波形
应用所提出的动态功率跟踪控制策略的系统中超级电容电压和电流波形如图6 所示。从图6 中可以看出,基于所提出的控制策略,在电机处于制动工况时,超级电容的充电电流随超级电容电压和电机制动功率动态调整,并且在电机工况切换时超级电容的充放电电流冲击较小,系统的动态性能得到提升。第1次制动期间,超级电容端电压从102 V 上升到146 V,提高了44 V。第2次制动期间,超级电容端电压从90 V上升到175 V,提高了85 V。对比双闭环控制策略,采用所提出的动态功率跟踪控制策略时,超级电容吸收的能量更少。
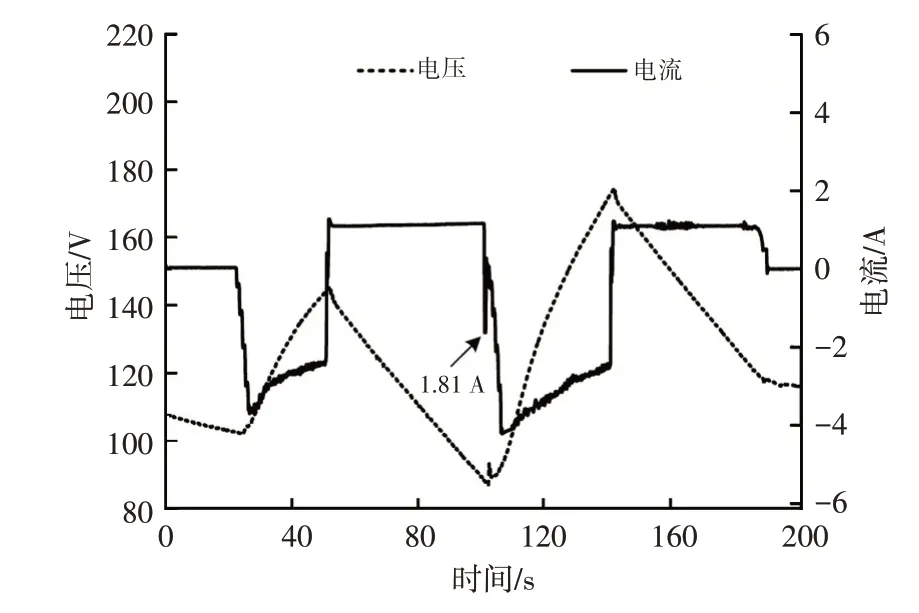
图6 动态功率跟踪控制下的超级电容电压和电流波形
双闭环控制策略下的蓄电池电压和电流波形如图7所示。在电机工况切换时蓄电池侧存在电流冲击,这将对蓄电池的使用寿命产生负面影响。当电机从制动工况切换到驱动工况时,蓄电池电流冲击分别为0.68 A和1.75 A。当电机从驱动工况切换到制动工况时,蓄电池电流冲击为2.48 A。在第1次、第2次制动期间,蓄电池侧输出电流平均值分别为0.76 A、0.97 A。从蓄电池电压和电流波形中可以看出,采用双闭环控制策略的系统由于动态跟踪性能较差,制动工况期间,超级电容不仅吸收电机发出的再生制动能量,同时也从蓄电池侧吸收能量。
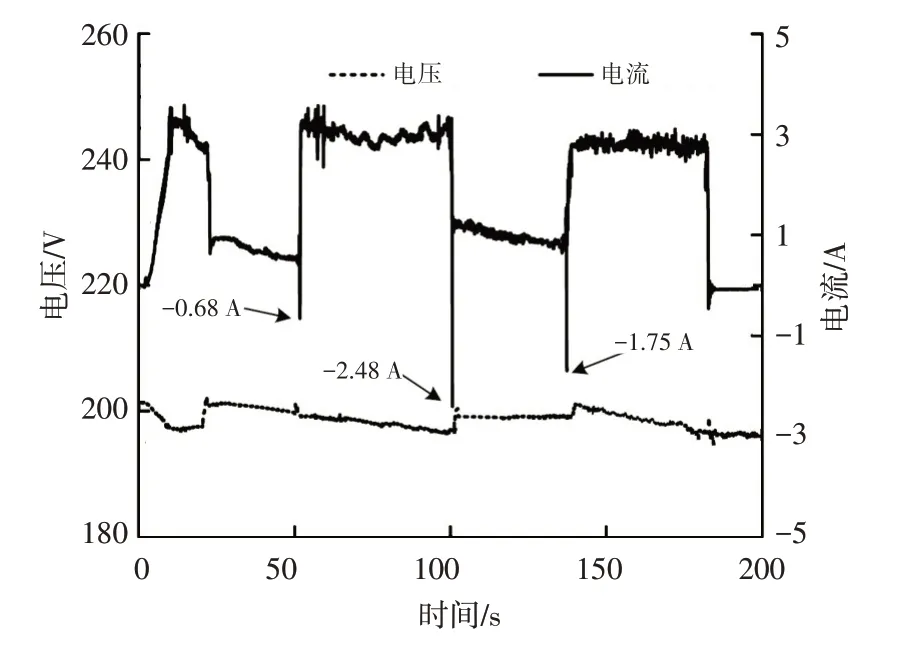
图7 双闭环控制下的蓄电池电压和电流波形
动态功率跟踪控制策略下的蓄电池电压和电流波形如图8 所示。基于动态功率跟踪控制的系统在所提出的操作循环中蓄电池电流冲击较小,对蓄电池起到了较好的保护作用。在第1次、第2次制动期间,蓄电池侧输出电流平均值分别为0.27 A、0.34 A。相较于双闭环控制策略,制动工况期间,采用所提出控制策略的系统中蓄电池的输出电流明显减小,超级电容充电功率对电机制动功率的跟踪性能得到提升。制动期间,在双闭环控制策略下超级电容吸收蓄电池能量的现象得到抑制,因而在相同的制动工况下,所提出控制策略使超级电容吸收的能量更少。
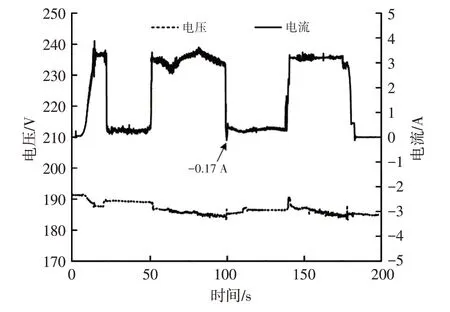
图8 动态功率跟踪控制下的蓄电池电压和电流波形
根据上述试验结果,所提出控制策略可以快速跟踪电机制动功率,并且在电机工况切换时,相较于双闭环控制策略,所提出控制策略对应系统的蓄电池电流冲击更小,对蓄电池起到了较好的保护作用。
5 结束语
本文针对电机制动功率的精确跟踪,提出了一种基于混合储能系统的动态功率跟踪控制策略。采用Thevenin模型对超级电容进行建模,设计了基于卡尔曼滤波的状态观测器实时跟踪超级电容状态。通过主电容电压、极化电压和超级电容端电流实现超级电容端电压的实时预测。然后,结合电机功率、超级电容端电压和双向DC/DC 电源变换器的效率等参数,以功率跟踪为目标建立了损失函数,通过求解损失函数实时获取超级电容的充电电流参考值。经试验验证,相较于双闭环控制策略,所提出的动态功率跟踪控制策略体现出了更好的功率跟踪性能,并且在电机工况切换时,系统中储能单元受到的电流冲击明显降低。
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22