基于机器学习的纯电动汽车未来工况预测*
2023-12-29 13:44蒋有灿张毅
汽车技术 2023年12期
蒋有灿 张毅
(重庆理工大学,重庆 400054)
主题词:未来工况预测 纯电动汽车 机器学习 数字地图 实车在环
1 前言
目前,汽车行业正由传统的内燃机汽车向新能源汽车发展[1]。然而,消费者对于电动汽车仍存在诸多顾虑,如电池技术不够成熟、动力不足、续驶里程焦虑等[2]。针对电动汽车续驶里程焦虑问题,可以通过实时在线预测未来行驶工况并预估电池荷电状态(State Of Charge,SOC)来判别剩余续驶里程是否满足出行需要,缓解里程焦虑。部分学者针对车辆未来行驶工况预测开展了研究:盘朝奉等[3]使用视频检测系统获取路况信息,根据马尔可夫滚动预测方法预测未来工况;李玉芳等[4]设计了基于工况特征的车辆行驶工况预测方法,通过建立道路和交通特征模型保证了预测的普适性和准确性。部分学者对电池SOC 预测进行了研究:Sun 等[5]采用卡尔曼滤波法建立电池SOC 模型,对系统状态进行最优估计;韩忠华等[6]应用扩展卡尔曼滤波算法并结合神经网络算法进行SOC估计,能够将预测误差控制在一定范围内,但是对动力电池模型的准确性和计算能力要求较高;刘光明等[7]基于最小二乘法辨识车辆能耗参数,提高了预测精度。
虽然目前已有多种方法可以通过预测车辆工况计算出电动汽车的SOC,但多数预测算法并未考虑到车流状况对单车能耗及SOC 预测的影响,且大多数方法仅通过软件模型仿真来检验预测结果是否准确。基于此,本文利用数字地图的应用程序接口(Application Programming Interface,API)获取实时车流信息,通过云端服务器进行在线预测并进行实车道路试验验证。
2 硬件平台与数据来源
2.1 实车在环子系统
如图1a 所示,试验采用纯电动汽车逸动EV460。试验涉及的硬件设备如图1b所示,主要包括GPS模块、USB 转CAN 模块、4G LTE 上网卡以及上位机电脑。上位机通过USB 转CAN 模块获取上述整车实时数据,由GPS模块定位车辆位置并将相关信息通过4G LTE网络传输到云端服务器。试验车辆相关配置参数如表1 所示。在互联网分布式实车在环仿真平台上进行试验[8],实车在环平台通过车载诊断系统(On-Board Diagnosis,OBD)接口与车载CAN总线建立连接,通过向车载电子控制器单元(Electronic Control Unit,ECU)发送特定请求实现车辆状态数据实时采集。采集的数据包括:车速、油门踏板位置、整车驱动功率、电机输入功率。

表1 测试车辆参数
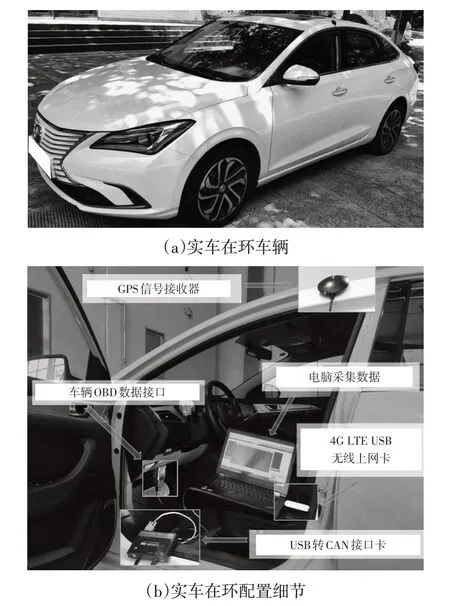
图1 实车在环子系统
2.2 电池软件仿真子系统
为解决测试车辆车载电池的SOC 估算精度不高的问题,本文在云端服务器建立SOC仿真模型。该模型可根据车辆实时上传的驱动功率,通过安时积分法计算对应SOC的变化量。图2所示为电池等效电路模型,该模型将理想电压源与内部等效电阻串联。其中,开路电压Voc和等效内阻Rin与电池SOC 有关。图3所示为充放电试验得到的某型号磷酸铁锂电池的开路电压与等效内阻在不同SOC下的相应数据[9]。
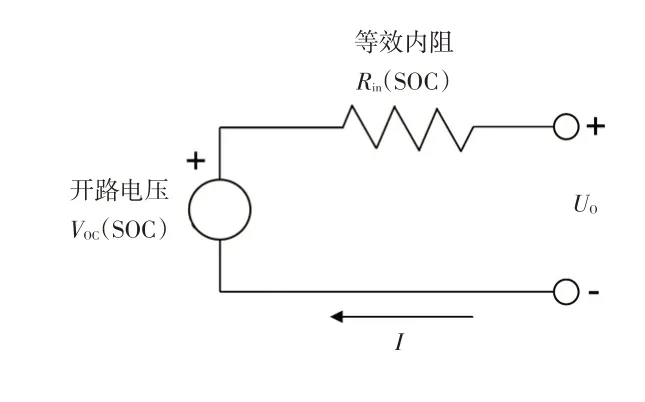
图2 电池等效电路

图3 电池开路电压与等效内阻对应数据
根据图2所示的模型和图3中的Voc和Rin数据,使用安时法可以求得SOC的变化量ΔSSOC:
式中,Qbattery为电池电量,即电池额定容量;Pbattery为电池输入的电功率,由车辆驱动功率计算得到[9],放电为正值,充电为负值。
2.3 互联网分布式实车在环仿真平台
互联网分布式实车在环仿真平台如图4 所示[8],本文仿真对象(即纯电动汽车)的驱动系统部分(包括电动机和传动系统)和储能系统部分(锂离子动力电池)分别由位于实际行驶道路的实车硬件在环系统和位于云端的锂电池软件仿真模型进行协同仿真,实车硬件在环系统与云端服务器之间通过4G LTE网络通信实现数据耦合。此外,本文提出的实车工况在线预测算法试验同样基于此平台展开,以实现基于实车的道路试验验证。

图4 互联网分布式实车在环仿真平台
2.4 实车道路试验路线
本文的研究对象为在预定路线上行驶的车辆,如通勤车辆和公交车辆。如图5所示,试验行驶路线预先选定为重庆理工大学附近的一段市区道路,其中不含高速公路。行驶路线全长约20.6 km,行驶时间约50 min。通过在晚高峰时段(17:30~19:30)进行数据采集,相关车流数据可包括从通畅(南滨路)到严重拥堵(其余路段)的多种工况,具有典型性。同时为了避免驾驶员的驾驶习惯对试验产生影响,要求驾驶员在保证安全的前提下,应尽可能跟随车流行驶。
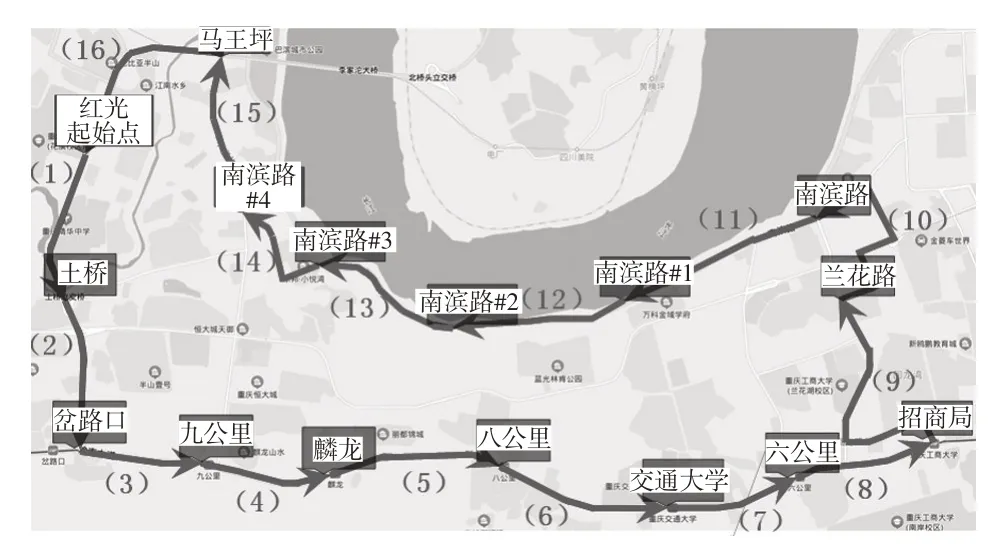
图5 试验路线
为优化数据处理,并提高数据的可靠性和稳定性,根据路段特征(如十字路口和红绿灯)将行驶路线(即采集的数据)分割成16个部分。图5中的定位点即为各路段的分割点,部分子路段被称为“微行程”。根据已有的研究[10],一组经过良好分割的“微行程”可以方便数据处理,增强鲁棒性。
2.5 基于OBD的实车行驶数据采集
图6 展示了通过OBD 接口采集的实车历史数据。对采集的数据进行整理,提取到反映行车规律的几种特征参数如表2所示,包括平均车速、平均加速度、平均减速度等,该类特征参数提取的样本数据将用于后续机器学习算法的训练。OBD 记录的数据在处理过程中已去除停车等待时间,即速度、加/减速度等特征参数的计算并不包括停车等待时间段的数据,停车等待时间仅参与单位行驶距离时间消耗的计算。

表2 用于聚类的特征参数-车辆OBD

图6 车辆OBD行驶数据
2.6 基于百度地图应用程序接口的车流数据
如图7所示为从百度地图API 获取的车流数据,由百度地图的实时路况查询服务接口(Traffic API)和批量算路服务接口(RouteMatrix API)获得。利用实时路况查询服务,开发者可以查询指定道路区域的实时拥堵情况和拥堵趋势,其优势在于更新频率快,可确保开发者获取最新的实时路况;利用批量算路服务可以确定起点和终点,批量计算路线规划距离和行驶时间。
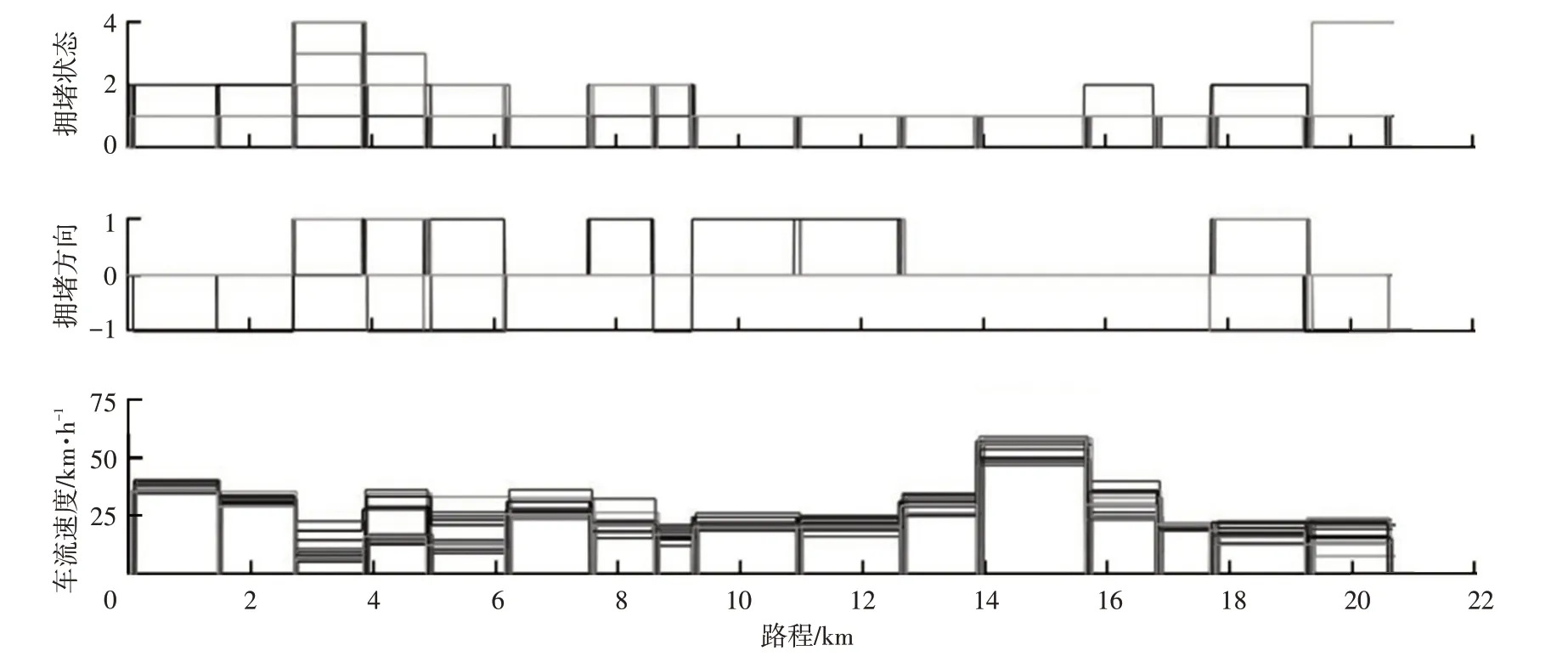
图7 百度地图API数据
通过百度地图API 获取的车流信息主要有3 种类型,如表3 所示。其中拥堵状况、拥堵方向参数来自实时路况查询服务,而车流速度参数则来自批量算路服务。具体而言,拥堵状况是对道路进行的划分,包括未知(0)、畅通(1)、缓行(2)、拥堵(3)、严重拥堵(4)等,如果出现拥堵,则拥堵方向表示为同向(1)或反向(-1),即相同行驶方向的拥堵会产生影响,相反行驶方向的拥堵不会造成影响。车流速度为行驶里程与行驶时间之比。因为此处的行驶时间包括了车流中的停车等待时间,即车流速度为行驶距离与行驶时间的比值,行驶时间中包括停车等待的时间。
表3 用于聚类的特征参数-百度地图API
完成训练的机器学习算法使用百度地图API 提供的实时车流数据对未来实车工况进行在线预测,进而预测电池电量变化情况。
3 基于历史数据的机器学习预测算法
预测算法流程如图8 所示。首先,使用K 均值(KMeans)聚类算法对历史数据(包括表2中的单车信息和表3 的车流信息)进行聚类分析,并根据工况的差异程度将其聚类为6个子工况。然后,将聚类得到的样本数据作为训练样本用于训练径向基函数(Radial Basis Function,RBF)神经网络分类器。最后,使用训练好的RBF 分类器作为未来行驶工况的预测工具在实车道路试验中使用。
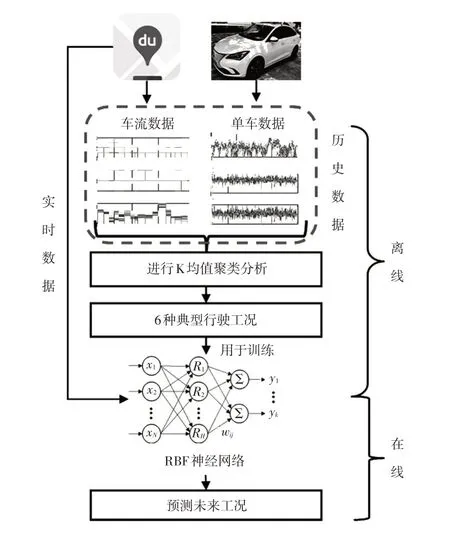
图8 预测算法流程框架
3.1 车联网与云计算
车辆工况预测算法需要强大的计算能力和存储空间,而车载控制器难以满足条件,车联网与云计算可以有效解决上述问题。如图9 所示,首先,通过OBD 和百度地图API获取单车历史数据和车流历史数据,并存储于云端服务器,基于此数据集对本文算法进行训练。其次,在实车试验中,云端服务器使用训练后的预测算法,结合百度地图API 提供的实时车流数据对剩余电量进行在线预测。最后,将预测结果发送到测试车辆。

图9 车联网与云计算影响机理
3.2 聚类分析
聚类分析是根据数据中的描述对象及其关系信息进行无监督分类的分析方法。K-Means 算法是基于划分的聚类算法,其利用质心来定义簇的原型。其中,质心即为数据的均值,通过计算样本点到质心的距离来判定相似程度,距离越远,越不相似。K-Means 算法流程如图10 所示,指定k个初始的质心,距离质心近的点分别形成簇。簇的质心会随着样本点的指派发生变化,通过不断迭代计算更新簇的质心,直到数据簇质心不再发生较大变化时结束计算。图11 所示为基于历史数据(包括通过OBD获取的实车数据和通过百度地图API获取的车流数据)聚类后的6种典型车辆行驶工况。

图10 K-Means算法流程
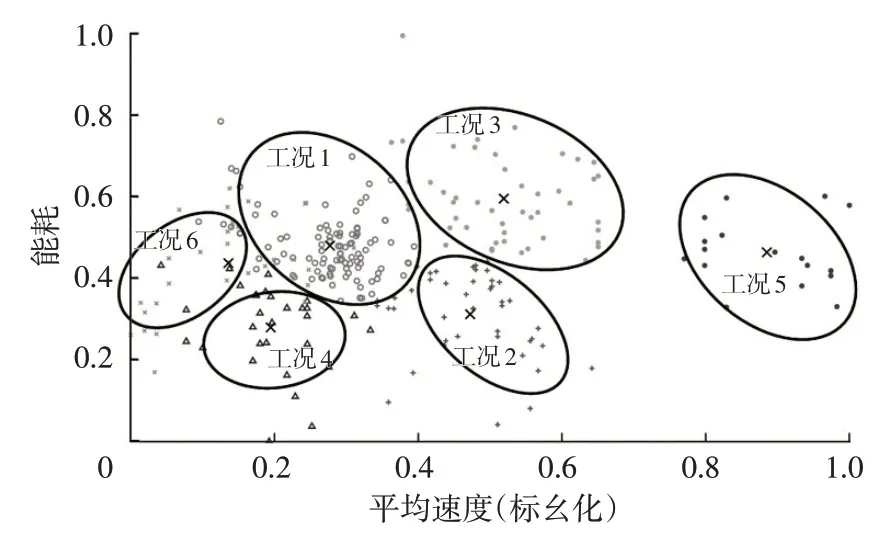
图11 聚类分析结果示例
图12 和图13 所示为聚类后的6 种行驶工况的能耗、时耗概率分布直方图。结合各工况能耗、时耗可以发现:工况2 的能耗相对工况1 较低,两者时耗在100~200 s/km 范围内的概率较高,意味着这2 种工况有较大概率在低时耗区间;工况3 时耗较低,但能耗最高;工况4 时耗较高,能耗最低;工况5 时耗最低,能耗较高;工况6时耗最高,能耗也较高。可以利用这6种工况的数据样本训练神经网络分类器,以便对实时工况进行预测。
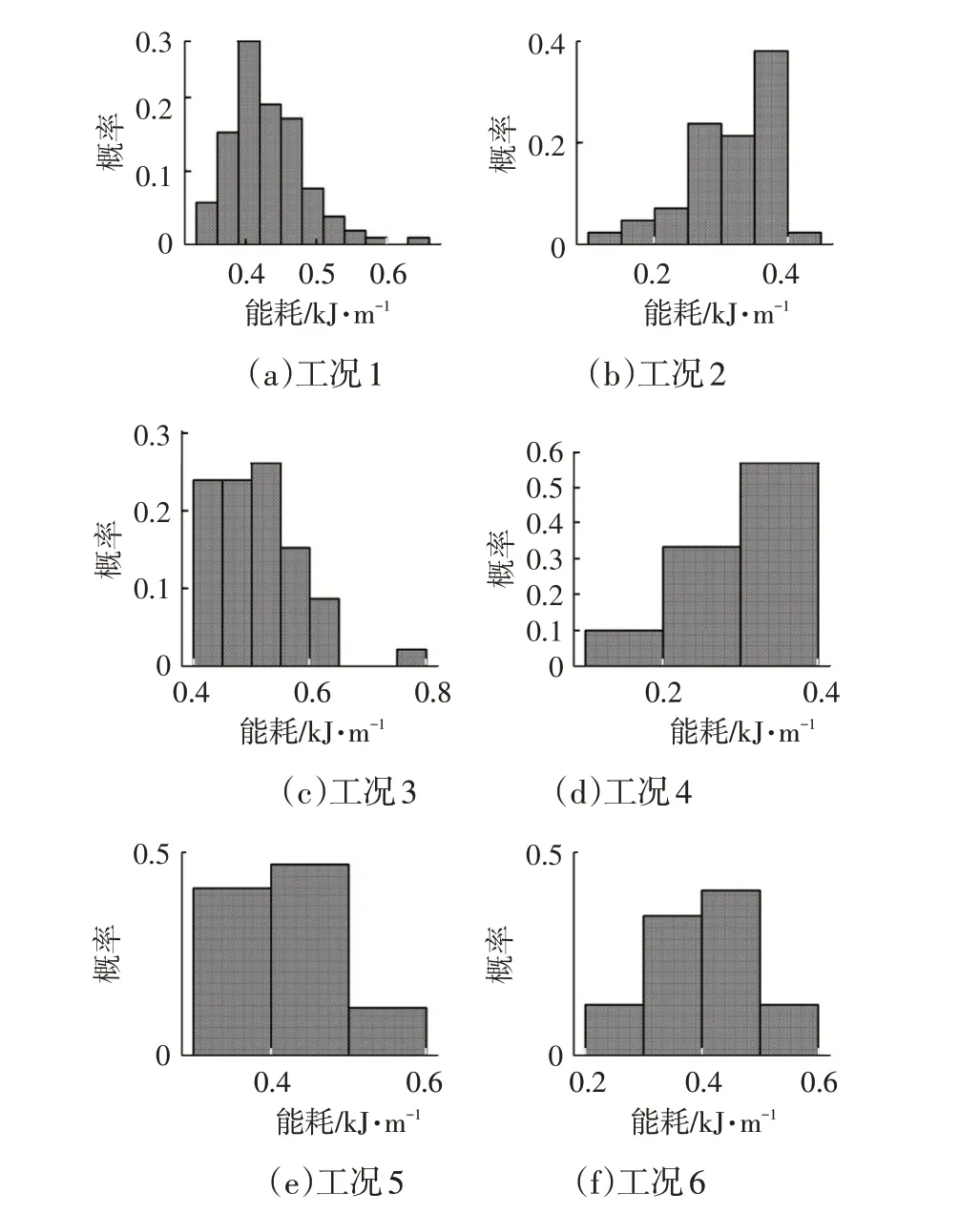
图12 能耗概率直方图

图13 时耗概率直方图
3.3 基于RBF神经网络分类器的工况预测
基于聚类后的行驶数据和百度地图API数据训练人工智能神经网络,使其可以实现车辆行驶工况的在线分类。
图14所示为一个局部逼近的3层RBF神经网络。类似于神经元接收信号,输入层的输入是数据的特征参数。隐含层使用径向基函数中的高斯函数作为传输函数:

图14 RBF神经网络结构
式中,x为样本数据特征参数的向量,本文涉及来自百度地图API 的3 个参数,即拥堵状况、拥堵方向和车流速度;σj、cj分别为第j个隐含层神经元的方差、中心向量,即上述K-Means 算法确定的聚类中心,试验共分为6种工况,即存在6个中心向量。
最终,输出层第i个输出量的结果为隐含层结果的加权和:
式中,wij为第j个隐含层变量与第i个输出量之间的连接权重;wi为第i个输出量的偏置权重。
选取yi值最大的工况类型作为最终分类的结果。训练完成后,该RBF 神经网络分类器即可根据百度地图API 提供的实时车流信息进行未来行驶工况的在线预测。例如:在车辆出发前通过百度地图API获取某一段具体路径的实时车流数据,然后使用训练后的RBF神经网络分类器根据车流数据预测这段路径未来的行驶工况(包括能耗或时耗)。
4 实车道路试验
4.1 试验条件与背景
使用互联网分布式实车在环仿真平台对该机器学习预测算法进行实车道路测试,以验证其预测精度。试验路线为重庆理工大学花溪校区周边市区道路,与2.4节中用于采集历史数据的路线相同,见图5。为保证车辆有充足的电量完成试验,电池初始电量设置为0.7;为保证同时包括拥堵与通畅路况,使其更具有代表性,设置出发时间在17:30左右(晚高峰时段),试验相关参数如表4所示。
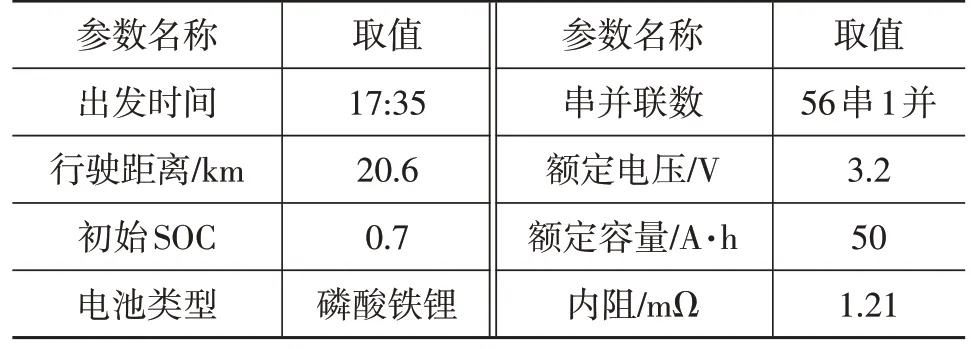
表4 试验条件
4.2 试验结果分析
实车道路试验的空间域与时间域结果如图15 所示。两者的数据相同,选取不同坐标轴表示。本文在空间域进行预测,并根据空间域结果推算时间域结果,使试验结果更直观。对比图15a与图15b可知,在时间域中非线性能耗波动较大,导致SOC曲线较陡,故基于时间域的预测相对困难。而在空间域中,SOC曲线较为平缓且呈线性,预测相对容易,故选择在空间域中预测更合理。
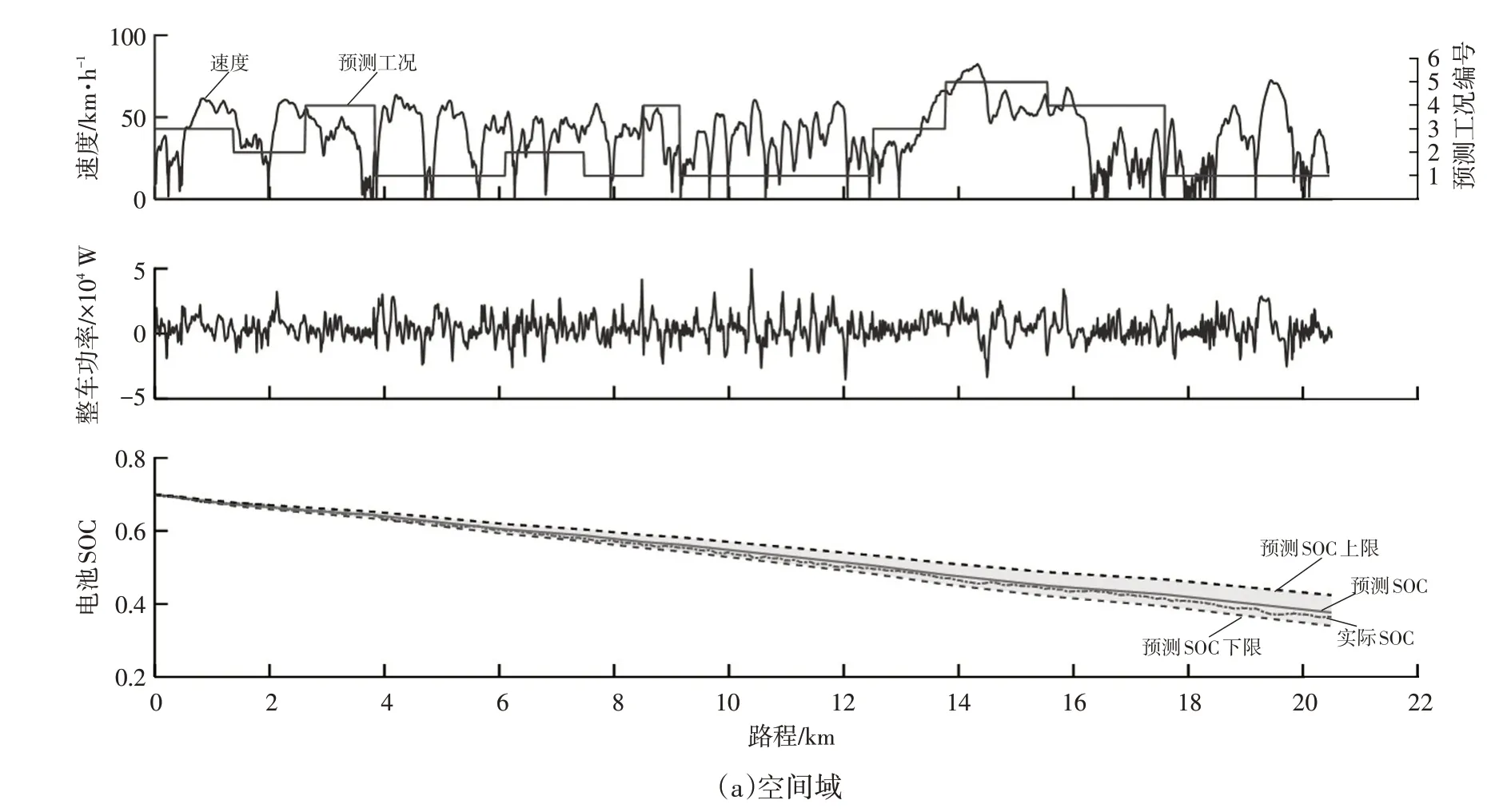
图15 实车道路试验结果与预测结果
由图15a 可以看出,不同路况的平均速度不同,分别对应拥堵路况与畅通路况,因此本文路况满足多样性要求,能够充分检验算法的预测性能。其中,SOC 预测值曲线由图12 典型工况能耗的数学期望值得到,SOC预测值的上/下限是借助拉依达准则对图12中能耗的概率分布处理得到的。此准则适用于正态或近似于正态分布的数据集。计算数据的标准偏差,进而根据一定概率确定误差区间。本文取数值分布在(μ-σ,μ+σ)中的概率为0.682 7,其中μ为均值,σ为方差。当偏差超过此区间(1σ范围)时,认为此次预测不合格。由图15a中SOC曲线可以发现,预测曲线在上/下限之间且较平缓,与实际曲线吻合度高,结果预测准确度高。
SOC预测结果的误差如表5所示,具体数据分别对应试验路线中划分的16 个子路段(见图5)的预测结果。参考表5 中的数据,初始误差在较小的范围内,但随着预测路段延后,误差不断累积,最大误差为3%左右,预测算法可靠性高。

表5 预测值与实际值误差
5 结束语
本文基于机器学习算法,结合数字地图历史车流数据和历史单车数据,训练出位于云端的分类器。使用由数字地图API 提供的实时车流数据预测电动汽车未来行驶路况,并基于互联网分布式实车在环仿真平台对提出的预测算法进了实车道路试验。结果表明,预测值和实际值误差保持在5%以内,且大部分小于2%,算法能够准确预测未来工况。
猜你喜欢
车主之友(2023年2期)2023-05-22
工会博览(2022年33期)2023-01-12
汽车实用技术(2022年19期)2022-10-19
内燃机与配件(2021年11期)2021-09-10
内燃机与配件(2020年20期)2020-09-10
Defence Technology(2020年4期)2020-07-02
扬子江(2019年3期)2019-05-24
青年与社会(2018年2期)2018-01-25
浙江大学学报(工学版)(2016年9期)2016-06-05
数学教学通讯·初中版(2015年5期)2015-06-17