车辆与电网互动模式下电动汽车充放电控制策略研究
2023-12-29 13:45:02王涛郑阔刘旺磊
汽车技术 2023年12期
王涛 郑阔 刘旺磊
(河北工程大学,邯郸 056038)
主题词:车辆与电网互动 电动汽车 双向AC/DC变换器 充放电控制策略空间矢量脉冲宽度调制
1 前言
电动汽车(Electric Vehicle,EV)是一种新型动态高能量负荷,其大规模无序入网将给电网的负荷平衡带来新的挑战[1-2]。电动汽车既是能量负荷单元,也是能量存储单元,具有荷-源双重复合性,作为动态分布式能量存储单元参与车辆与电网互动(Vehicle to Grid,V2G)服务,能够平抑峰谷负荷差,快速响应电网的调峰调频命令,最优化电网运行能力[3-5]。
V2G 的关键在于双向变换器的设计。文献[6]提出了双向H 桥DC/DC 变换器,相比于普通的双向半桥DC/DC变换器,具有可在不同电压等级下工作且输出电压范围宽的优点。文献[7]提出了一种零电压转换三电平双向DC/DC 变换器,可在更高的开关频率下工作,实现更高的功率密度和效率。文献[8]提出了一种电压型双有源桥型(Dual Active Bridge,DAB)双向DC/DC 变换器拓扑结构,采用相移调制技术进行功率流控制,具有电气隔离、软开关和优越的双向潮流能力等优点,但其电压转换范围较小,且会给系统注入较大的无功功率。文献[9]提出的T 型三电平逆变器可实现能量的双向流动,但其功率开关管数量多,控制结构复杂,在应用中存在中点电位不平衡问题。
相比于单级式双向AC/DC 变换器,两级式双向AC/DC变换器拓宽了输出电压范围,可有效调节蓄电池的充放电过程,延长蓄电池的使用周期。本文以两级式双向AC/DC变换器为研究对象,针对电动汽车的荷-源双重复合性设计前馈解耦电压电流双闭环控制策略,对双闭环的PI 参数进行整定并根据伯德(Bode)图分析系统的稳定性,采用恒流充放电控制策略控制功率流的双向流动,并针对高频谐波抑制问题,设计无源阻尼型LCL滤波器。最后,在MATLAB/Simulink中搭建系统仿真模型,仿真分析所提出的控制策略的可行性与有效性。
2 V2G充电桩数学模型建立
本文采用无隔离两级式双向AC/DC 变换器,由三相电压型脉冲宽度调制(Pulse Width Modulation,PWM)变换器和双向DC/DC 变换器构成主电路拓扑结构,如图1 所示。在用电低谷期,电动汽车作为负荷接入电网,三相电压型PWM 变换器工作在整流状态从电网中吸收能量,经过双向DC/DC 变换器降压进行充电,网侧电压电流同相位;在用电高峰期,电动汽车作为临时电源接入电网反馈能量,三相电压型PWM 变换器工作在有源逆变状态,双向DC/DC 变换器工作在升压状态,网侧电压电流相位相差180°。
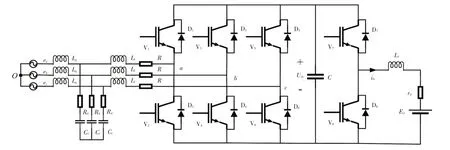
图1 V2G模式主电路拓扑结构
2.1 三相电压型PWM变换器
三相电压型PWM变换器由3个单向半桥逆变电路组成,同一桥臂的上、下2个半桥工作状态互补,能量双向流动的功能通过电流方向的改变实现,采用空间矢量脉冲宽度调制(Space Vector Pulse Width Modulation,SVPWM)技术生成功率开关管V1~V6的开关信号。
根据图1,在低频状态下将LCL 型滤波器等效为L型滤波器进行设计,应用基尔霍夫定律,建立在三相静止坐标系下的数学模型:
式中,ea、eb、ec分别为电网a、b、c相电压;ia、ib、ic分别为网侧a、b、c相电流;ua、ub、uc分别为整流器输入端与中性点O之间的a、b、c相电压;R为等效电阻;L=Lf+Lg为总电感;Lf、Lg分别为桥臂侧电感和网侧电感。
在三相静止坐标系下,交流侧电压与电流无耦合关系,但电压和电流是时刻变化的。为便于设计PI 控制器,实现无静差控制,必须经过克拉克(Clark)变换和派克(Park)变换将三相静止坐标系下的交流量转化为d-q旋转坐标系下的直流量[10]。
将式(1)经过Clark 变换转化到α-β两相静止坐标系下,变换关系式为:
式中,xα、xβ分别为相应物理量的α、β轴分量;xa、xb、xc分别为相应物理量的a、b、c相分量。
联立式(1)、式(2)可得α-β坐标系下的数学模型:
式中,iα、iβ分别为网侧电流的α、β轴分量;eα、eβ分别为网侧电压的α、β轴分量;uα、uβ分别为变换器交流侧电压的α、β轴分量。
将式(3)经过Park 变换转化到d-q旋转坐标系下,变换关系式为:
式中,xd、xq分别为相应物理量的d、q轴分量;ω为d-q轴旋转角速度;t为时间。
联立式(3)、式(4)可得d-q坐标系下数学模型:
式中,id、iq分别为网侧电流的d、q轴分量;ed、eq分别为网侧电压的d、q轴分量;ud、uq分别为变换器交流侧电压的d、q轴分量。
2.2 双向DC/DC变换器
双向DC/DC 变换器选择Buck/Boost 拓扑结构实现升压和降压2 种状态。功率开关管V7、V8不能同时导通,通过正弦脉宽调制技术产生V7、V8的驱动脉冲,改变占空比可调整输出电压。
2.2.1 蓄电池充电降压
充电时双向DC/DC变换器等效为V7和D8构成的降压斩波(Buck)电路,V7导通时,D8截止,充电电流i0按指数曲线上升,基于分时段线性电路思想[11],由基尔霍夫定律可得:
式中,Udc为直流母线电压;i0为充电电流;Ed为蓄电池等效电动势;rd为蓄电池等效电阻;L1为直流侧电感。
根据式(6),由三要素法可解得i0,当V7截止时,i0达到电流最大值I20,则:
式中,τ=L/R为时间常数;I10为V7导通时的电流初值;ton为开关管的通态时间。
当V7处于断态时,D8导通续流时的初值为电流最大值I20,电感L1作为储能元件与蓄电池构成回路释放能量,i0呈指数曲线下降,则:
根据式(8),由三要素法可解得i0,当D8截止时,i0等于V7导通初态的电流初值I10,则:
式中,toff为开关管的断态时间。
联立式(7)、式(9)可解得:
式中,T=ton+toff为开关周期;α为占空比。
由ton/T≤1 可判断此时为降压工作状态,即充电过程。
2.2.2 蓄电池放电升压
放电时,双向DC/DC 变换器等效为V8和D7构成升压斩波(Boost)电路,基于分时段线性电路思想,与Buck电路类似的方法可解得:
由T/toff≥1 可判断此时为升压工作状态,即放电过程。
3 电动汽车充放电控制策略研究
3.1 前馈解耦控制
分析式(5)可知,d-q轴之间存在2 个耦合项,为得到独立的直流变量id和iq并进行单独控制,采用PI控制器解耦,控制框图如图2所示,则:
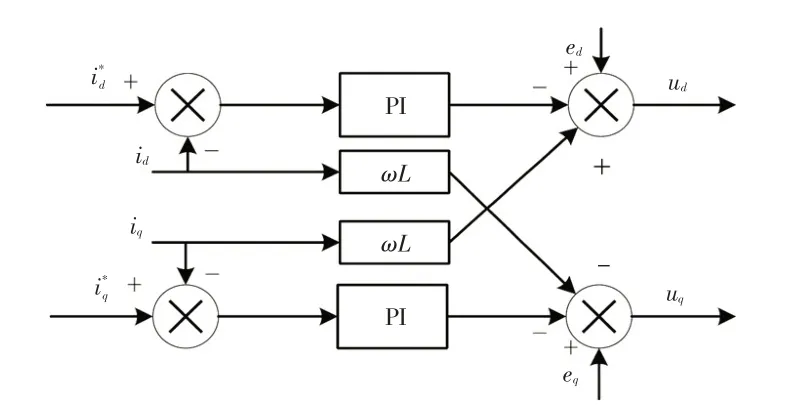
图2 前馈解耦控制框图
式中,Kip、KiI分别为电流环比例系数、积分系数;、分别为d、q轴电流指令值。
联立式(5)、式(12)可解得前馈解耦后的数学模型:
式中,s为复频率。
由式(13)可知,2 个耦合项被消除,电网电压前馈解耦的电流回路控制框图如图3所示。、分别控制系统的有功功率和无功功率,系统以单位功率因数运行,故令=0。

图3 电网电压前馈解耦的电流回路控制框图
3.2 双闭环PI控制器设计
采用电压、电流双闭环控制策略,电流内环使控制过程的动态响应速度更快,电压外环可增强控制系统的抗干扰能力。电流内环的控制指令由电压外环提供,将直流母线电压Udc与电压参考值相减,经过PI控制器得到d轴电流内环指令值,电流内环输出项与电流前馈解耦项和电压前馈补偿项叠加后输出d-q旋转坐标系下交流侧电压参考值ud与uq,经过d-q两相旋转坐标系到α-β两相静止坐标系的变换后,由SVPWM 技术得到功率开关器件V1~V6的驱动信号。
3.2.1 电流内环控制系统设计
图4所示为电流内环控制结构简化框图,其中1.5Ts合并了采样延迟环节的时间常数Ts和小惯性环节的时间常数0.5Ts。

图4 电流内环控制结构简化框图
令电流环时间常数τi=Kip/KiI=L/R,加入补偿环节后的开环传递函数为:
式中,Ts为开关周期;Kpwm为等效增益,采用SVPWM 调制时为1。
按照典型Ⅰ型系统进行参数整定,取阻尼比ξ=0.707,则:
由式(15)计算可得PI参数:
计算可得:Kip≈16.7,KiI≈226.7。
合并时间常数Ts与0.5Ts前、后的幅频与相频特性曲线如图5所示,在中低频段,2条曲线基本重合。合并前截止频率为4 310 rad/s、相角裕度为63.2°,合并后截止频率为4 090 rad/s、相角裕度为65.2°,对系统稳定性和带宽影响较小。
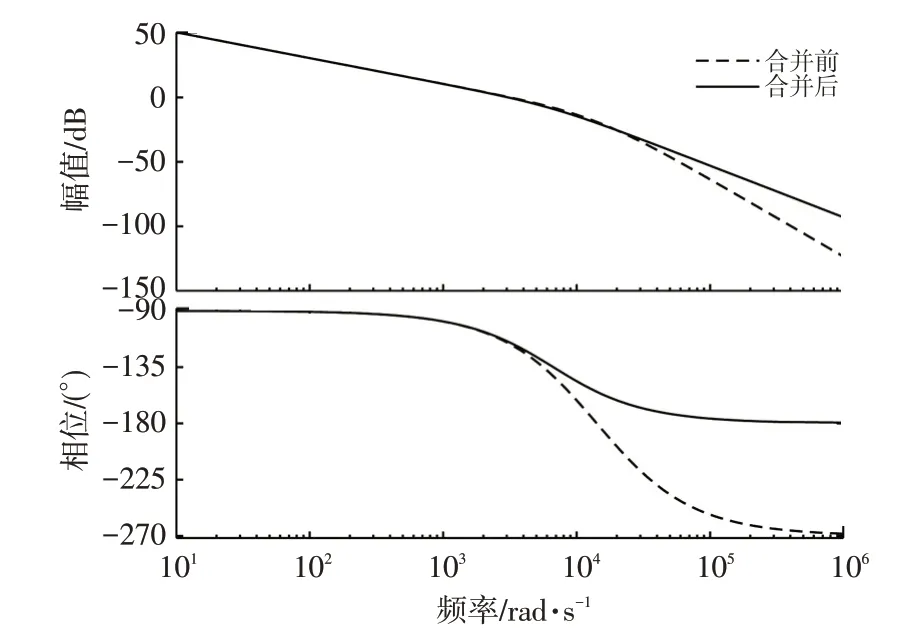
图5 电流内环Bode图
电流内环作为电压外环的传递函数,开关周期Ts很小,可忽略s2项,则电流内环闭环传递函数为:
3.2.2 电压外环控制系统设计
图6所示为电压外环控制结构简化框图,其中Tev表示合并电流闭环传递函数等效为一阶惯性环节的时间常数3Ts和采样小惯性环节的时间常数Tv,即Tev=3Ts+Tv。开关频率fsw远大于基波频率,只考虑开关函数的低频分量[12],时间变量K=0.75mcosθ≤1,其中m≤1 为PWM 调制比,θ为初始相位角度,K受θ影响,为时变量,故用最大增益0.75代替K。

图6 电压外环控制结构简化框图
则电压外环开环传递函数为:
式中,τv为电压外环时间常数;Kvp电压环比例系数;C为直流侧电容。
电压外环按照典型Ⅱ型系统进行参数整定,取中频带宽hv=τv/Tev=5,则:
式中,hv为中频带宽。
由式(19)计算可得PI参数:
式中,KvI为电压环积分系数。
计算可得Kvp=10,KvI=5 000。
合并时间常数3Ts与Tv前、后的幅频与相频特性曲线如图7所示,在中低频段,2条曲线基本重合。合并前截止频率为1 900 rad/s、相角裕度为47.5°,合并后截止频率为1 790 rad/s、相角裕度为41.1°,系统具有较好的稳定裕度和带宽。

图7 电压外环Bode图
分析图5、图7可知,内、外环截止频率相差过小,故电压外环PI参数还需通过仿真再次整定。
3.3 双向DC/DC变换器控制策略
3.3.1 恒流充放电控制策略
恒流充放电控制框图如图8所示,双向DC/DC变换器采用恒流充放电控制策略,充放电共用同一个单电流闭环PI 控制器。计算额定充放电电流与实际电流i0的误差,经PI 控制器限幅后与三角载波比较输出功率开关管V7、V8的PWM信号。
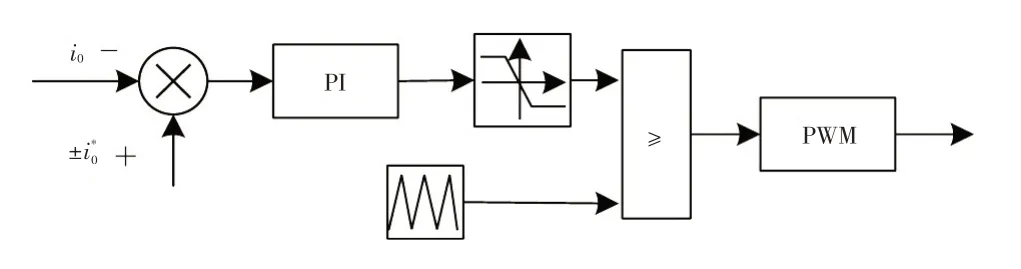
图8 恒流充放电控制框图
3.3.2 直流侧参数设计
直流侧电容可稳定整流器输出电压,缓冲交直流的能量转换,则:
式中,ΔUmax为直流侧电压波动,取直流母线电压的5%;tr为上升时间;Rdc为等效电阻;P为额定总功率。
直流侧电感需同时满足Buck 和Boost 2 种工作模式,则:
式中,ΔIr为纹波电流,取充电电流的3%;fsw=10 kHz为开关频率;Ud为蓄电池端电压。
计算得122 μ F≤C≤6 210 μ F、L1≈19 mH,取C=5 000 μ F、L1=20 mH。
4 LCL滤波器设计
电动汽车属于非线性负荷,并入电网会产生大量高次谐波,因此必须对并网电流进行滤波,使其满足并网电流谐波总畸变率(Total Harmonic Distortion,THD)≤5%的要求。LCL滤波器在高频段以-60 dB/dec衰减,电容元件支路的容抗Xc=1/ωC与频率f成反比,对高频分量呈现低阻抗作用并提供通路分流,从而可抑制高频谐波电流流入电网[13]。而电感支路的感抗XL=ωL与频率f成正比,对高频谐波分量呈现高阻抗作用,因而LCL 滤波器具有良好的高频衰减特性,故本文选择LCL滤波器进行设计,LCL滤波器如图9所示。
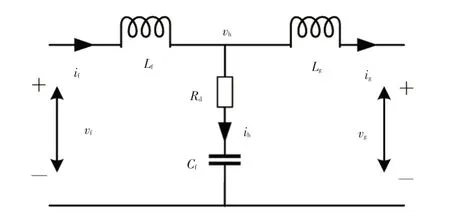
图9 LCL滤波器
4.1 LCL滤波器数学模型
由单相LCL滤波器推广到三相LCL滤波器中,根据图9 应用基尔霍夫定律推导数学模型并绘制等效框图如图10所示,则:
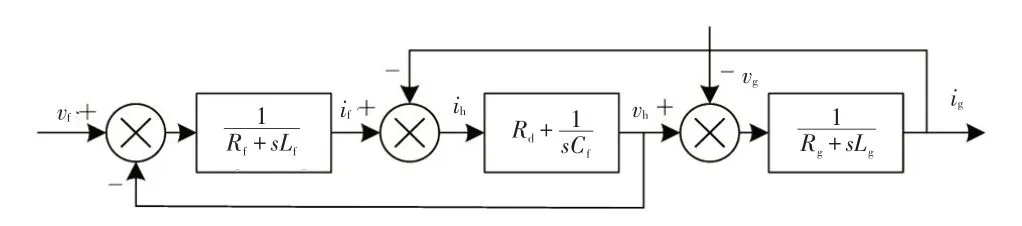
图10 LCL滤波器等效框图
式中,Rf、Rg分别为电感Lf和Lg的寄生电阻;Rd为阻尼电阻;Cf为滤波电容;ih、if、ig分别为流过Cf、Lf和Lg的电流;vf、vg、vh分别为桥臂侧、网侧和电容支路电压。
忽略寄生电阻Rf和Rg,根据图10,由梅逊公式可得桥臂侧电压vf与网侧电流ig的传递函数:
由式(24)可知,LCL 滤波器是三阶系统,具有良好的高频衰减特性,但在谐振频率处有谐振尖峰,故本文采用无源阻尼法抑制谐振尖峰。
4.2 LCL滤波器参数设计
电容越大,LCL 滤波器对高频谐波的抑制效果越好,但系统无功损耗增大,功率因数降低,则:
式中,E为网侧电压有效值。
电感增大会导致无功损耗增大,其体积和压降损耗均会增加,且动态响应变差,则:
式中,Em、Im分别为网侧电压和电流最大值。
约束Lf≥Lg,Lg=rLf,取r=0.3。并网电流纹波大小取决于Lf,则:
式中,ΔImax为电流纹波,取额定电流的20%。
LCL滤波器在谐振频率fres处电流谐波较大,因此fres需满足,基波频率fn=50 Hz,计算可得0.05 kHz<fres=1 670 Hz<5 kHz。采用滤波电容串联阻尼电阻Rd的无源阻尼法抑制谐振尖峰,但阻尼电阻过大会引起功率损耗[14],则:
式中,ωres=1/fres为谐振角频率。
计算可得Cf≤16.4 μF、Lf+Lg≤9.2 mH、Lf≥3.8 mH、Rd≤3.1 Ω,取Cf=10 μF、Lf=3.8 mH、Rd=2.5 Ω。
5 系统仿真及分析
在MATLAB/Simulink 中搭建V2G 模式下电动汽车充放电的仿真模型,如图11 所示。仿真中加入锁相环模块,其作用是锁定电网相位信息,提供参考角频率。为实现单位功率因数充放电,即控制无功功率Q=0,故设定q轴电流指令值=0。
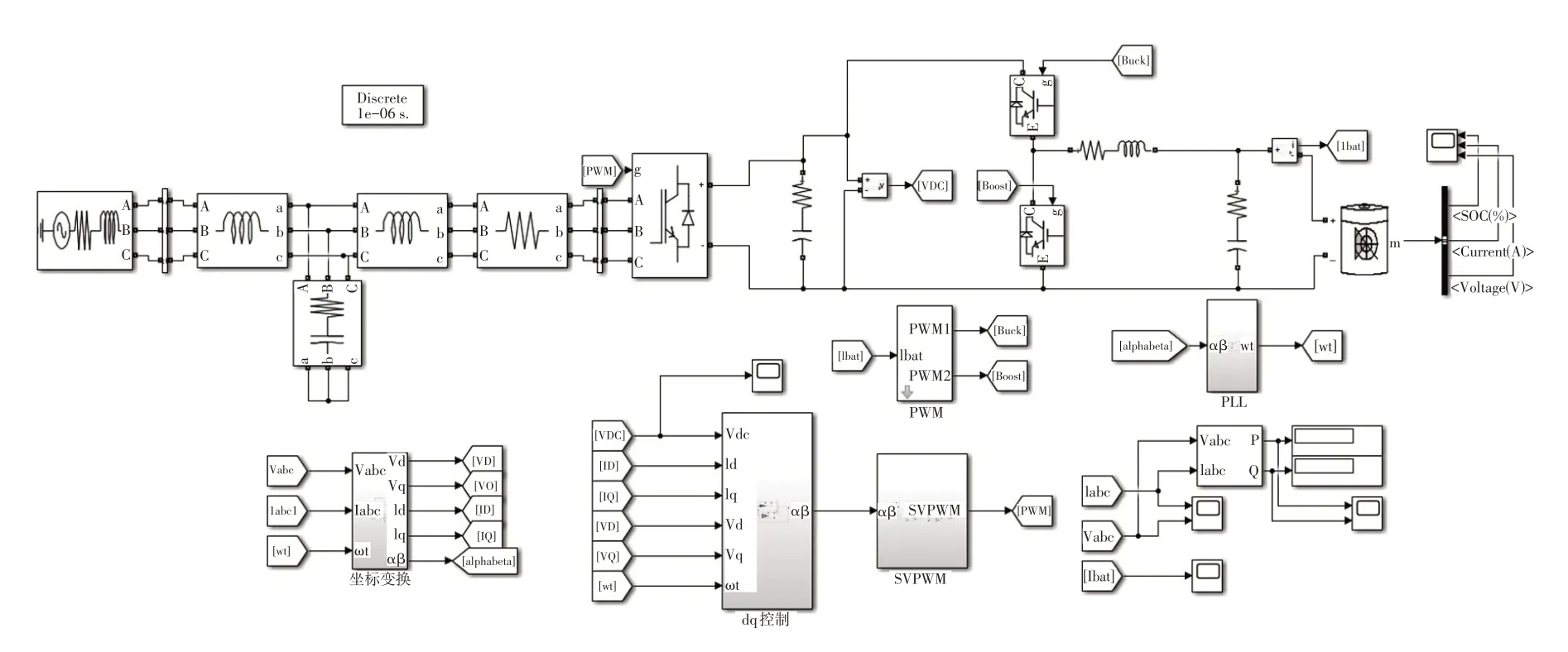
图11 V2G仿真模型原理图
网侧电压电流波形如图12所示,规定在V2G模式下充电电流方向为正,网侧电压和电流波形均为正弦波且无明显畸变,没有较大的冲击电流,充电时网侧电压、电流波形相位相同,放电时网侧电压、电流相位相差180°。
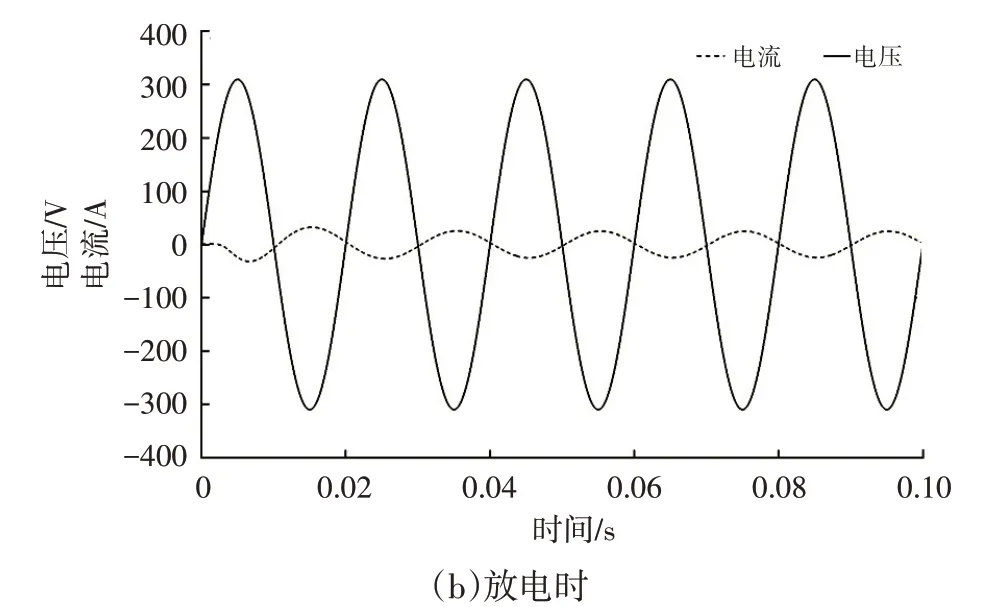
图12 网侧电压电流波形
恒流充放电时电流波形如图13 所示,由图13 可知:电动汽车充放电电流较快稳定在±30 A 左右;充电时电流波形经过约0.012 s 逐渐上升至30 A 且无超调,随后一直保持稳定;在放电初始阶段,电流波形出现波形超调现象,经过约0.018 s短暂调节后保持稳定。

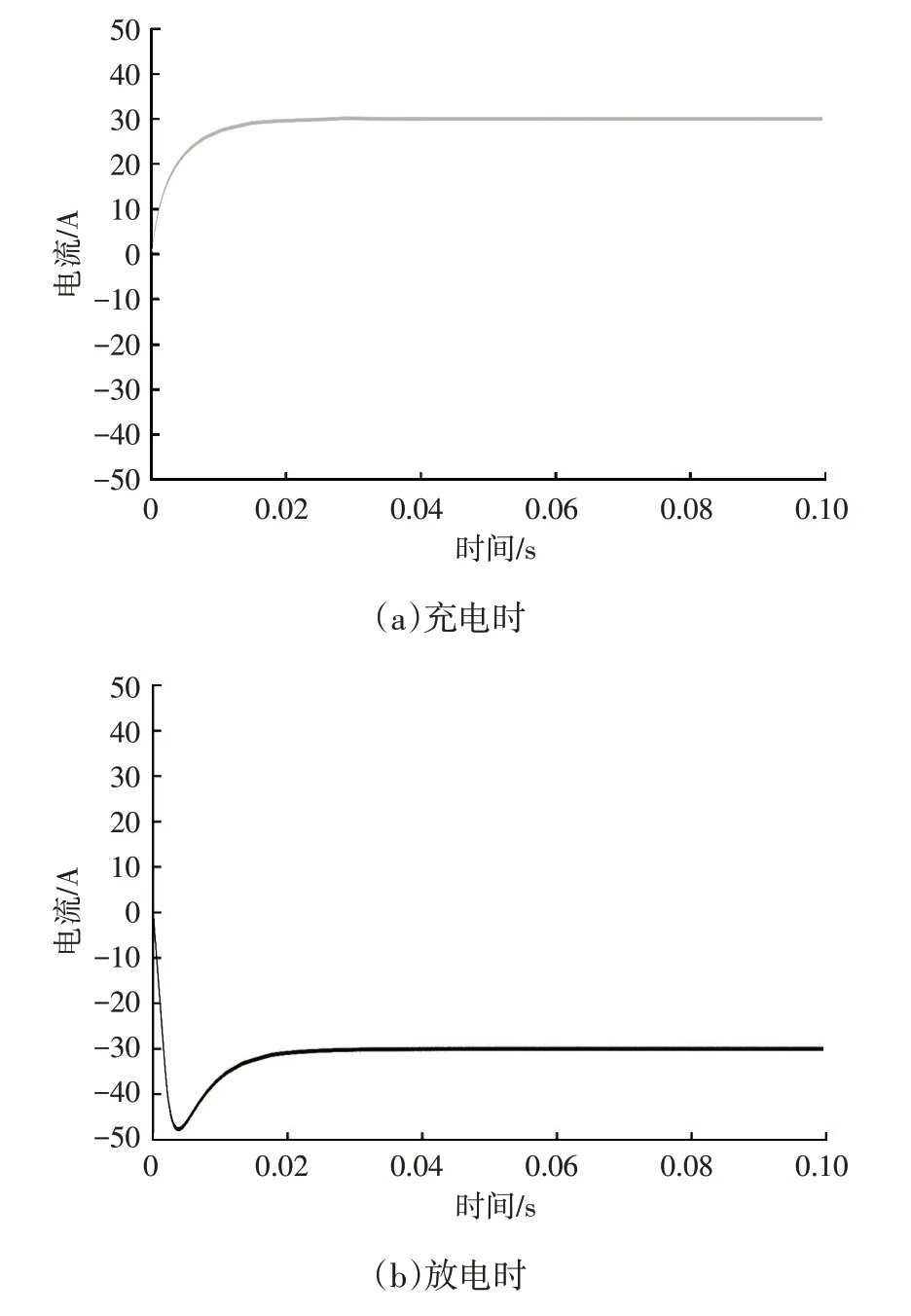
图13 恒流充放电时电流波形
充放电时直流母线电压波形如图14 所示,由图14可知:充电初始阶段直流母线电压Udc<,系统工作在整流和降压状态;放电初始阶段Udc>,系统工作在逆变和升压状态;直流侧母线电压最终稳定在700 V左右,调节时间短且超调量小。
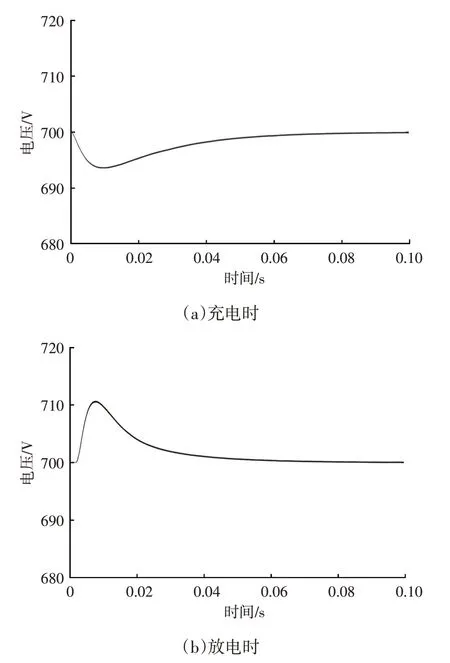
图14 充放电时直流母线电压波形
并网电流快速傅里叶变换(Fast Fourier Transform,FFT)分析结果如图15所示,并网电流THD为0.86%,小于5%,符合并网要求。
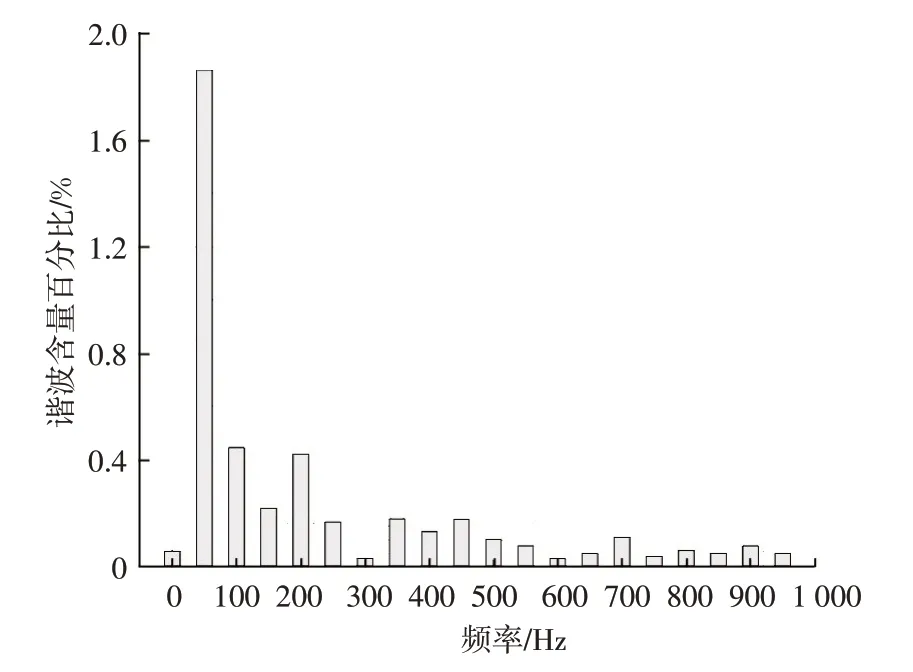
图15 并网电流THD
6 结束语
本文提出了一种用于V2G的两级式双向AC/DC 变换器,分析了其工作原理并建立数学模型,对其充放电控制策略和LCL滤波器进行设计,得到以下结论:
a.两级式双向AC/DC变换器功率器件数量少,可根据电网侧和蓄电池侧的特点独立设计控制策略,易于实现对蓄电池充放电过程的控制,延长蓄电池的使用寿命。
b.控制策略具有动态响应速度快、抗干扰性强的特点,可实现单位功率因数充放电。
c.采用SVPWM 技术,直流母线电压利用率高、谐波含量低,并网电流THD 仅为0.86%,对电网电能质量影响小。
d.LCL滤波器对高频谐波有良好的衰减特性,应用无源阻尼法可抑制其固有的谐振尖峰。
综上,本文构建的V2G 仿真模型结果验证了所提出控制策略的正确性,可实现电动汽车与电网之间能量的双向流动。
猜你喜欢
新能源汽车供能技术(2021年1期)2021-10-14 08:59:48
石油沥青(2021年1期)2021-01-11 05:41:31
汽车维修技师(2019年7期)2020-01-16 04:33:04
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:50
电子制作(2019年23期)2019-02-23 13:21:36
汽车维修技师(2018年11期)2018-05-11 02:38:32
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
电源技术(2015年5期)2015-08-22 11:18:02
焊接(2015年5期)2015-07-18 11:03:41
新高考·高一物理(2014年4期)2014-09-17 06:52:02