基于蜂窝车联网车路协同的交通灯车内应用场景研究*
2023-12-29 13:44张云顺谢锜帅郜铭磊李铁军华国栋
汽车技术 2023年12期
张云顺 谢锜帅 郜铭磊 李铁军 华国栋
(1.江苏大学,镇江 212013;2.中咨泰克交通工程集团有限公司,北京 100080;3.江苏智行未来汽车研究院有限公司,南京 211111)
主题词:蜂窝车联网 车内交通灯 闯红灯预警 通信延迟 丢包率
1 前言
车路协同(Vehicle-Road Coordination,VRC)技术是蜂窝车联网(Cellular Vehicle-to-Everything,C-V2X)的一种实现方式,C-V2X车路协同技术以其高可靠、低延迟特性成为智能交通领域的研究热点之一。美国[1-2]、欧盟[3-4]、日本[5-6]和中国[7]等均在不同领域和场景下对其进行了积极探索和应用,为未来智能交通的发展奠定了基础。
近年来,C-V2X 车路协同研究的重点是探索该技术在提高道路安全性和交通效率方面的潜力,以及开发和试验车路协同应用,其主要研究领域之一是开发基于车路协同的智能驾驶应用。针对无交通灯交叉口,Yang 等[8]提出了利用通信技术实现车内交通灯(In-Vehicle Traffic Light,IVTL)系统,并根据不同交通情况将无交通灯交叉口车辆控制分为优先控制和非优先控制,通过驾驶模拟试验证明了IVTL 能够辅助驾驶员穿越无交通灯交叉口。张航等[9]对逆向超车预警、车辆失控预警、限速预警、闯红灯预警应用场景展开研究,并依托开放道路低速网联自动驾驶示范区进行了验证,与城市道路相比,该场景下障碍物遮挡信号的情况少,更有利于车-路通信方案的实施。安泽萍等[10]考虑交通需求和道路环境属性双重因素,构建了更适合不同高速公路需求的场景库。Fu等[11]主要阐述了车-路通信在高速公路场景应用的研究进展,并讨论了近距离实时通信和中距离通信技术的现状。另一个研究领域是在不同条件的真实驾驶环境中验证C-V2X 通信系统的可靠性。Gao 等[12]实测了3种不同的车-路通信设备,分别在视距和非视距场景下测量其输出性能指标,包括丢包率、时延、吞吐量和通信距离,实测结果均能满足当地标准要求。Zhang等[13]分析了V2X性能测试框架中的常用技术,以路侧单元(Road Side Unit,RSU)部署为例介绍了设备部署情况。Miao等[14]分析了C-V2X通信技术的优点,说明了C-V2X标准及其在汽车道路安全系统中的应用。
综上,目前对于C-V2X 车路协同的试验研究主要集中在某一设备上,而非实际应用场景。然而,只有在实际的应用场景中进行试验才能更准确地验证其效果。因此,本文设计基于车路协同技术的交通灯车内应用场景,重点针对IVTL 和闯红灯预警场景构建实际道路环境,进行功能性和可靠性试验。
2 C-V2X车路协同应用场景
根据车路协同路侧端所实现的功能可将其应用场景分为交通诱导类场景和道路感知类场景,如表1 所示。
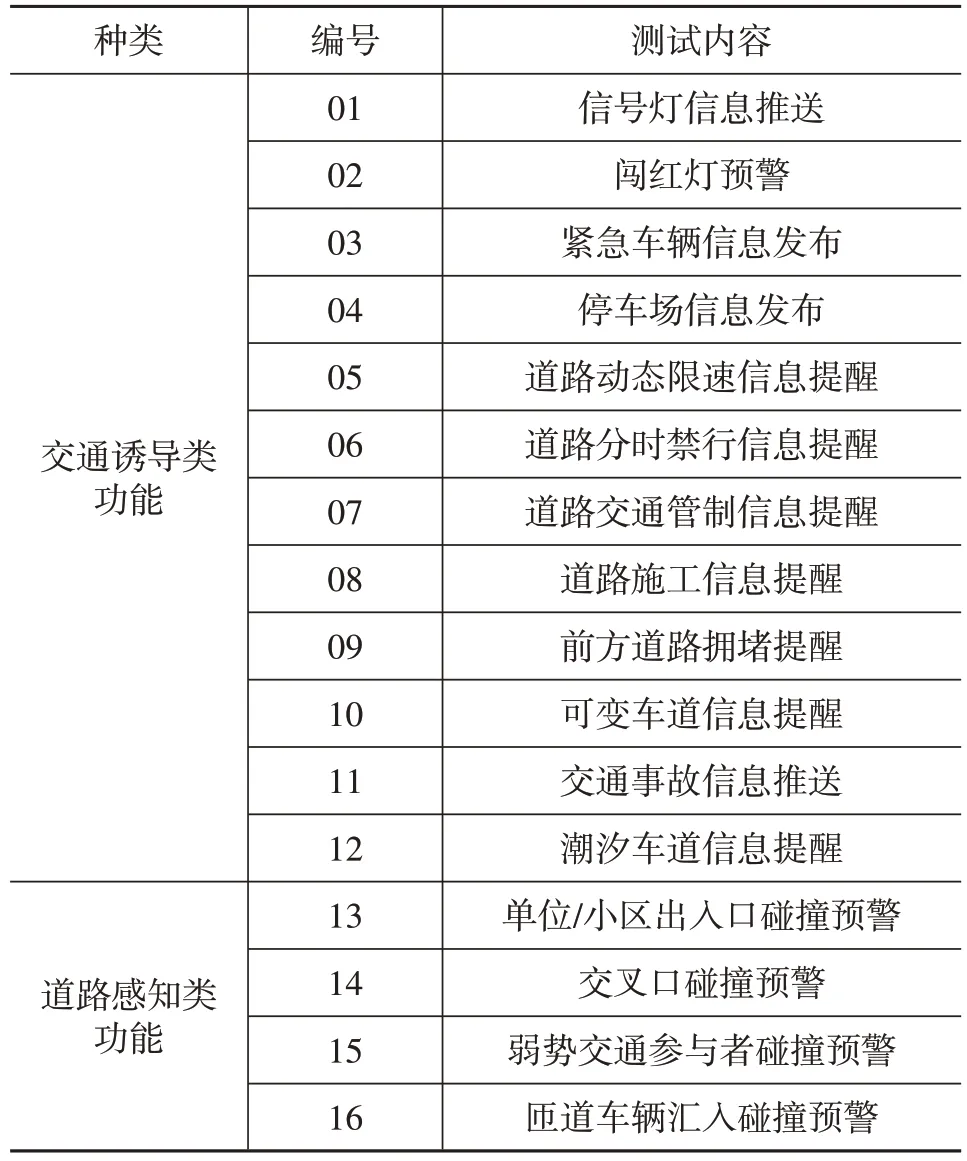
表1 车路协同应用场景体系
车路协同基础设施架构如图1所示,包括智能道路设施、车联通信网络、高精度时空网络。车路协同基础设施的具体功能和支持通信的设备如表2所示。本文重点分析交通诱导类场景中车内交通灯和闯红灯预警场景。

图1 车路协同基础设施架构

表2 车路协同基础设施概况
2.1 车内交通灯系统
交通灯是现代城市交通系统的重要组成部分之一,主要用于城市道路交通信号的控制与管理。通过IVTL系统,交通灯以一定的频率向外推送其相位、切换时间等信息,提醒驾驶员合法安全行车,以减少交通事故,提高通行效率。IVTL系统如图2所示。

图2 车内交通灯系统示意
该应用场景适用于城市道路和国、省、乡道。其实现的基本原理是将路口交通灯(On-Road Traffic Lights,ORTL)的实时相位信息和路口地图信息经信号机直传至车载单元(On-Board Unit,OBU)或由公安数据中台发送至OBU。车辆接近路口时,OBU向驾驶员提示前方ORTL状态信息。IVTL系统的基本性能要求如表3所示。
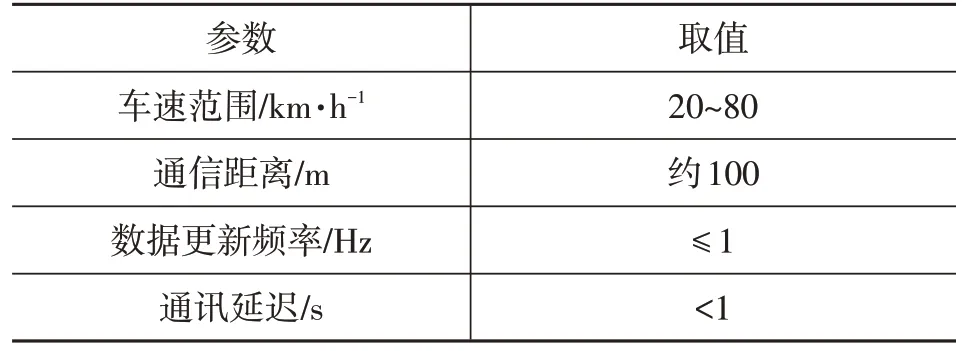
表3 车内交通灯系统基本性能要求
为了保证IVTL 与ORTL 的低延迟一致性,通过ORTL相位时间戳和IVTL显示时间戳进行对比,以实现信息同步。首先,IVTL和ORTL分别维护一个灯态时间戳记录和一个相位时间戳记录,当OBU 通过RSU 获取相位时间戳后,记录为灯态时间戳,将其与相位时间戳进行比对。如果发现时间戳不一致,则OBU 会通过基于长期演进的车联网(Long-Term Evolution-Vehicle to Everything,LTE-V2X)通信方式向RSU 发送同步请求,以保证其与ORTL时间一致。在具体实现过程中,需注意时间戳精度、同步频率以及同步算法的设计,同时需要考虑通信的安全性和可靠性等因素,确保两者的准确性和一致性。
2.2 闯红灯预警
闯红灯预警场景是指车辆经过有交通信号灯控制的交叉路口时,当车辆存在违反交通信号灯指示行驶的风险时,OBU 设备发出提醒信息,对驾驶员进行预警。闯红灯预警示意如图3所示。
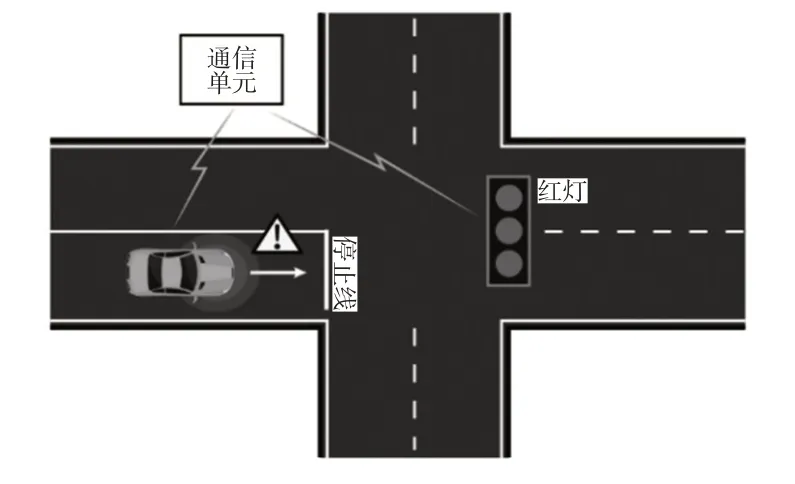
图3 闯红灯预警场景示意
该应用场景适用的道路条件与IVTL 场景相同。OBU收到消息后根据自身定位、速度、加速度等进行信息筛选、方向匹配,然后应用车辆运动状态估计算法估算车辆的运动状态信息,判断是否存在信号违规风险,当判断存在风险时,向驾驶员发出预警信息。预警信息可以通过车载终端屏幕、声音或振动等方式传递给驾驶员。对闯红灯预警的基本性能要求如表4所示。
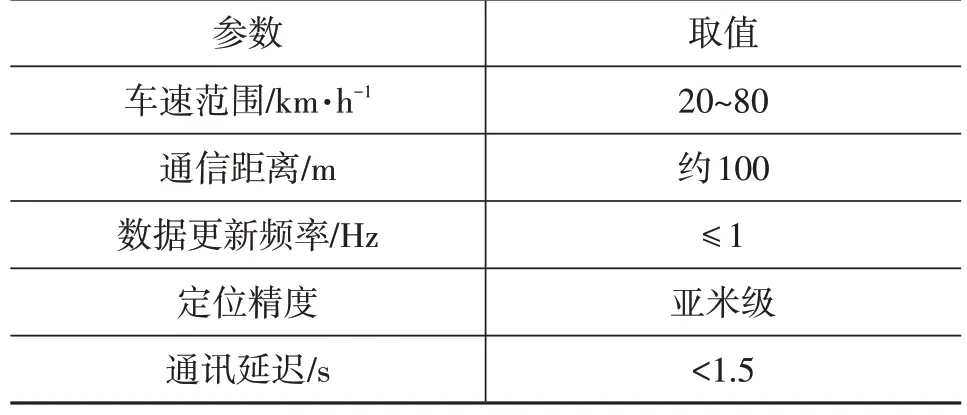
表4 闯红灯预警基本性能要求
3 实际道路试验
3.1 实际道路环境搭建
为了从功能性和可靠性方面验证C-V2X车路协同的实际效果,搭建了实际道路环境。试验设备主要包括电源箱、交通信号机、交通灯、可视化雷达检测器、RSU、OBU 等,如图4 所示。以车内交通灯为例,设备间的数据流向为:RSU通过交通信号机获取交通灯的相位和定时信息(Signal Phase And Timing Message,SPAT),然后将其存储在本地地图上并将得到的SPAT 向周围的OBU进行周期性广播,当OBU在RSU的广播范围内,其接收到信息后可通过车载交互系统显示交通灯的实时颜色和倒计时读秒。
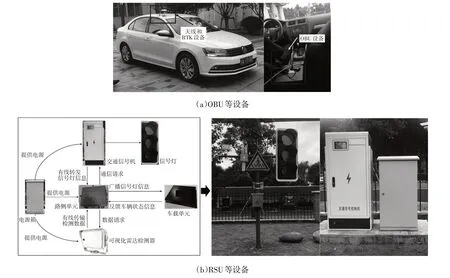
图4 试验设备及数据流向
试验过程中的关键设备如图5 所示。RSU 设备具备LTE-V2X(工作频段为5.9 GHz,发射功率≥20 dBm)、第四代移动通信技术(the 4th Generation mobile communication technology,4G,支持移动蜂窝通信网络,三网通)、WiFi(支持IEEE 802.11b/g/n协议,工作频段为2.4 GHz)通信方式,通信距离不少于500 m,支持全球导航卫星系统(Global Navigation Satellite System,GNSS)定位,数据更新频率为10 Hz。OBU 设备同样具备LTE-V2X、蜂窝通信(支持2G/3G/4G)、WiFi 通信方式,通信距离不少于500 m,支持GNSS定位。

图5 关键试验设备
3.2 试验过程
3.2.1 车内交通灯试验
如图6所示为一个路口的试验区域划分情况,实际试验中存在多个同样划分的路口。缓冲区1 设置为车辆车速稳定区域:试验车辆在到达场景触发区域前可在缓冲区内调整车速以达到试验规定速度并稳定车速,车速在50 km/h以下时误差控制在±3 km/h范围内,车速在50 km/h 及以上时控制误差在±5 km/h 范围内。场景触发区域为进行场景试验的区域,要求距离不少于400 m,车辆驶入该区域后保持匀速通过。缓冲区2 为考虑实际道路情况而保留的缓冲区域,包括人行横道宽度、路口宽度、绿化带宽度等。
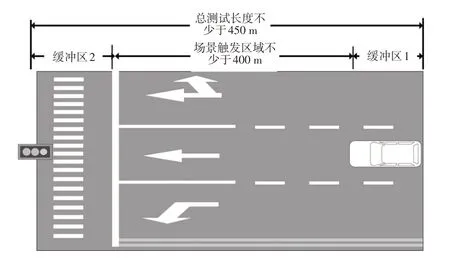
图6 试验道路划分
RSU 分别以LTE-V2X、4G 通信方式广播SPAT,配备OBU的试验车辆分别以20 km/h、40 km/h、60 km/h的速度进入试验区域,同时保证单次试验得到的数据量不少于600 条,每组试验进行3 次,最终从RSU、OBU 导出数据中获取消息的传输延迟时间、消息准确率、丢包率等结果。该应用场景要求LTE-V2X通信方式、4G通信方式的通信延迟(包括传输延迟、设备延迟等)分别低于400 ms、1 s,消息准确率不低于99%,丢包率不超过2%。通过RSU和OBU之间的数据传输校验机制判断接收数据的完整性,从而得出准确消息数量占接收消息总数量的比例,即消息准确率。
3.2.2 闯红灯预警试验
闯红灯预警试验区域划分与车内交通灯试验区域划分稍有不同,其总测试长度调整为不小于250 m,场景触发区调整为不少于150 m。RSU分别以LTE-V2X、4G 通信方式广播SPAT,配备OBU 的试验车辆分别以20 km/h、40 km/h、60 km/h的速度进入试验区域,同时保证单次试验得到的数据量不少于400条,每组试验进行3 次。通过OBU 显示设备(如与其连接的平板等)观察记录进入场景触发区域后场景是否触发。该场景要求不同通信方式下均能在触发区内成功触发闯红灯预警。
3.3 试验结果分析
对于功能性试验结果,OBU 进入场景触发区域后OBU 显示设备均触发了场景,如图7 所示,OBU 显示设备显示了车内交通灯、闯红灯预警等功能,且消息准确率不低于99%。
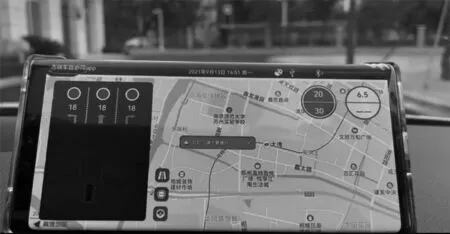
图7 实际道路试验结果
将静止状态RSU 和OBU 间以LTE-V2X 方式通信的延迟时间设定为设备延迟时间,由RSU 向OBU 发送数据信息,每次发送1 000 个数据包,共发送4 次,结果如图8 所示,丢包率为0,平均延迟时间为22.66 ms,即设备延迟时间为22.66 ms。
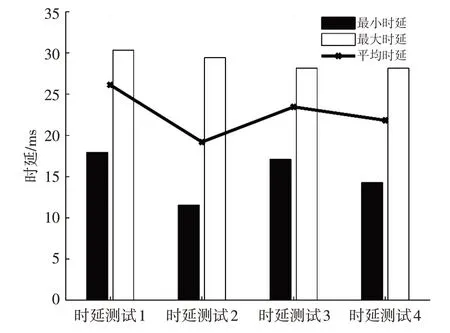
图8 RSU、OBU设备延迟时间
不同通信方式、车速和通信距离下的通讯延迟、丢包率情况如图9、图10 所示。对于可靠性试验结果,通信延迟时间和丢包率与通信方式、试验车速和通信距离有关。在通信距离较近且试验车速较低时,LTE-V2X通信方式相较于4G通信方式在通信延迟时间和丢包率上有更好的表现;随着通信距离的增加,LTE-V2X和4G通信方式的通信延迟时间和丢包率均有所增加。另外,随着试验车速的提高,各种通信方式的通信延迟时间和丢包率均有所上升,但始终能够满足丢包率低于2%、通信延迟低于1 s的要求,且LTE-V2X通信方式相较于4G通信方式受车速的影响更小,所以更适用于中高速场景。相较于4G,LTE-V2X 兼具远距离、低延迟、高可靠性的优势。

图9 不同通信方式、通信距离、车速下的通信延迟时间
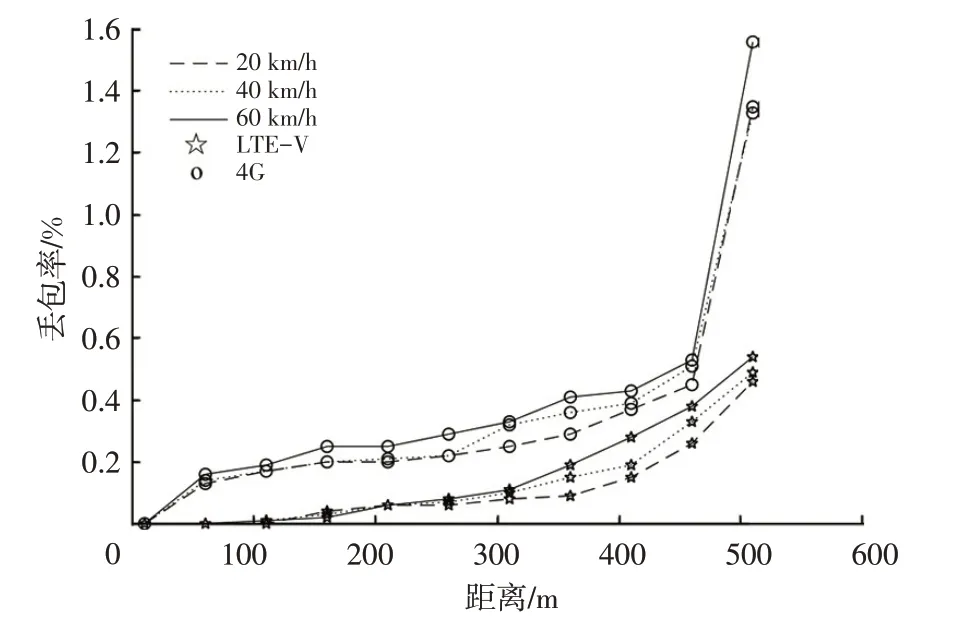
图10 不同通信方式、通信距离、车速下的丢包率
4 结束语
本文基于C-V2X车路协同的交通灯车内应用场景展开研究,阐述了IVTL和闯红灯预警场景的作用、适用范围、基本原理、性能要求,并从功能性和可靠性方面验证了C-V2X 车路协同的实际效果,搭建了实际道路环境,开展了IVTL试验和闯红灯预警试验。结果表明,在不同通信方式下所有试验场景均能有效触发且满足试验要求,LTE-V2X 通信方式相较于4G 通信方式,在通信距离、通讯延迟、丢包率上更具优势。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
计算机与数字工程(2022年1期)2022-02-16
作文·初中版(2021年12期)2021-09-15
科学大众(2021年9期)2021-07-16
电子测试(2018年23期)2018-12-29
电讯技术(2018年10期)2018-10-24
廉政瞭望(2017年8期)2017-09-13
文学少年(有声彩绘)(2017年1期)2017-02-14
汽车与安全(2016年5期)2016-12-01
电子制作(2016年21期)2016-05-17