
机器人手术系统在低位直肠癌根治术联合侧方淋巴结清扫术中的应用
2023-12-22 09:19谷晓明袁维堂
郑州大学学报(医学版) 2023年6期
谷晓明,袁维堂
郑州大学第一附属医院结直肠肛门外科 郑州 450052
在低位直肠癌患者中,侧方淋巴结转移的发生率为16%~23%,严重影响了预后[1-2]。全直肠系膜切除术(total mesorectal excision,TME)可有效降低直肠癌术后总体复发率,但并不能降低包括侧方淋巴结转移在内的局部复发率[2-3],因此,对于合并侧方淋巴结转移的直肠癌患者,需在直肠癌根治术的基础上联合侧方淋巴结清扫术(lateral lymph node dissection,LLND)。本研究对比了机器人手术系统辅助下与腹腔镜下直肠癌根治术(采用TME术式)联合LLND对低位直肠癌的疗效和安全性,探讨机器人手术系统的可行性、安全性及优势。
1 对象与方法
1.1 研究对象收集2016年3月至2020年6月在郑州大学第一附属医院接受机器人手术系统辅助或腹腔镜下TME+LLND治疗的低位直肠癌患者。纳入标准:①经病理证实为低位直肠腺癌,肿瘤位于腹膜反折下。②均可行机器人手术系统或腹腔镜下TME+LLND。③术前影像学评估以及术中探查均排除远处转移。④术前评估可耐受麻醉手术,无明显禁忌证。⑤病历资料完整。排除标准:①复发性直肠癌。②多源发癌。③合并其他肿瘤。④因肿瘤致肠梗阻、穿孔等原因行急诊手术。⑤可经内镜下手术切除的低位直肠癌。最终纳入187例,其中机器人组46例,腹腔镜组141例。
1.2 手术方式所有患者均顺利完成手术,且两位术者均具有15 a以上结直肠专科医师执业经历,年均完成机器人/腹腔镜下直肠癌手术量大于300例。入组患者均在TME手术离断肠管后按“三间隙”“四平面(直肠固有筋膜、尿生殖筋膜、膀胱腹下筋膜、壁筋膜)”原则依次行单侧或双侧LLND[4]。操作见图1。
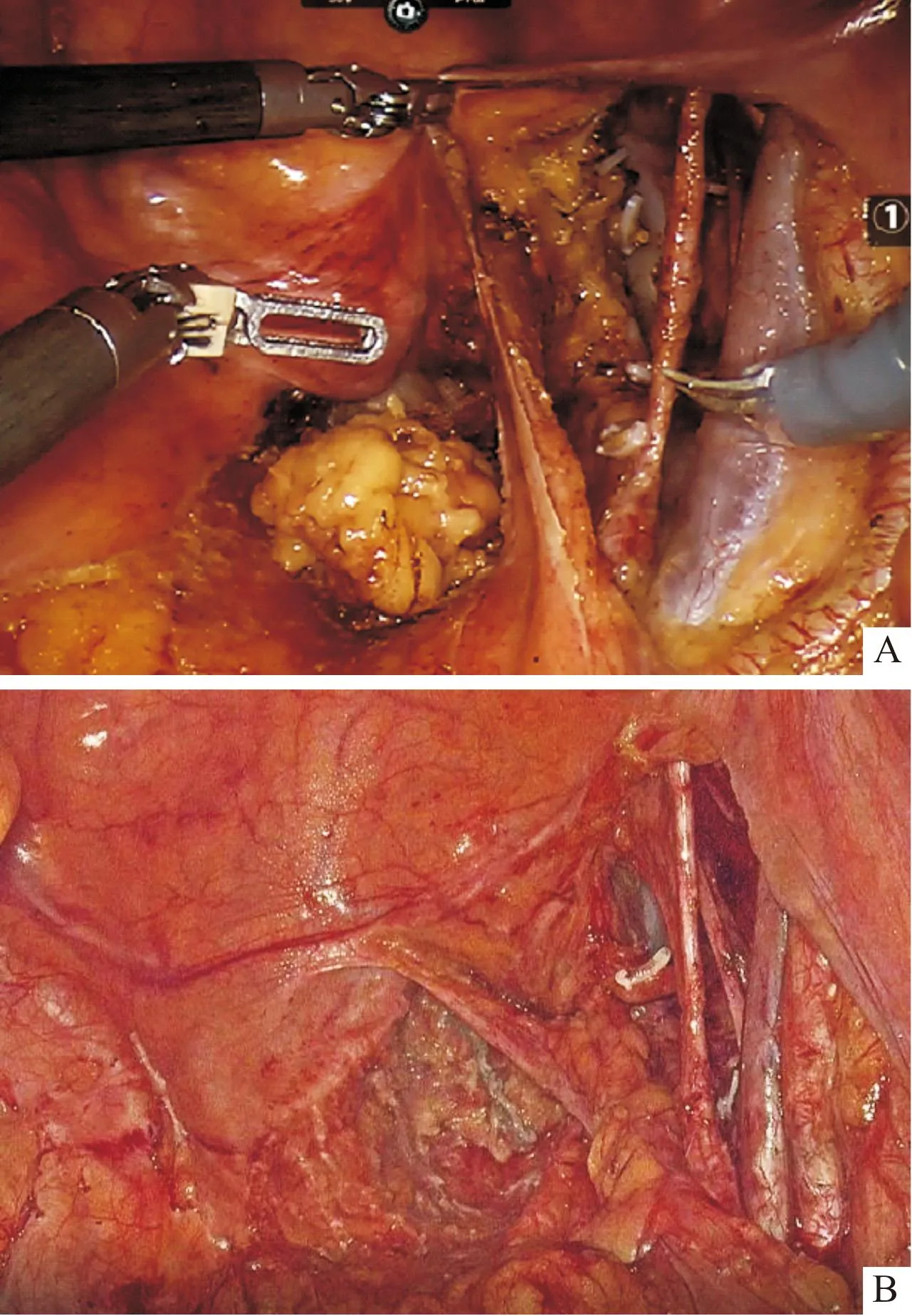
图1 机器人手术系统(A)和腹腔镜下(B)TMD+LLND
1.3 观察指标①基线资料:患者性别、年龄、BMI、肿瘤标志物、合并基础疾病情况、肿瘤距肛缘距离、术前及术后治疗情况。②围术期相关指标及功能学指标:手术方式、手术时间(TME+ LLND时间,具体以手术录像为准)、LLND时间、单侧或双侧清扫情况、出血量、术后排气时间、术后住院时间、淋巴瘘、肠梗阻、盆腔感染。治疗前及治疗1、6、12个月评价排尿功能和性功能。排尿障碍:采用国际前列腺功能评分(IPSS),研究[5]表明该评分同样适用于女性,IPSS分值与排尿功能障碍严重程度呈正相关。性功能评分:分别采用改良国际勃起功能问卷(IIEF-5)和女性性功能指数(FSFI-19)评估患者性功能,分值与性功能障碍严重程度负相关。③病理结果:TNM分期、系膜淋巴结清扫数、侧方淋巴结清扫数、肿瘤分化程度、环周切缘、神经脉管侵犯等。④随访:手术后开始随访,每隔3个月随访一次,通过门诊或住院病历、电话等方式随访。随访截至2022年3月。计算总生存期(overall survival,OS)、无病生存期(disease-free survival,DFS)。OS的终点事件为死亡,DFS的终点事件为肿瘤转移。
1.4 统计学处理采用SPSS 26.0进行统计学分析。采用两独立样本t检验或χ2检验比较2组基线资料、围术期相关指标及病理指标。采用重复测量数据的方差分析比较2组患者治疗前及治疗1、6、12个月IPSS评分和性功能评分的差异。采用Kaplan-Meier法绘制生存曲线,并行Log-rank检验。检验水准α=0.05。
2 结果
2.1 2组基线资料的比较2组基线资料差异无统计学意义,见表1。
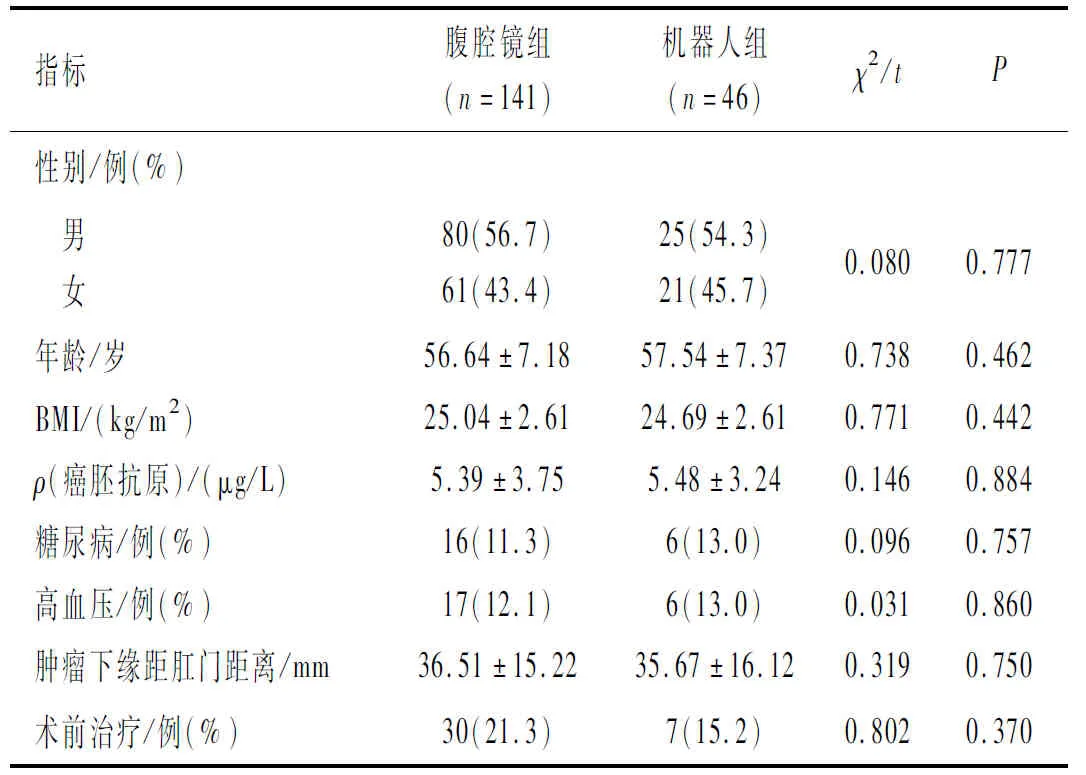
表1 2组基线资料的比较
2.2 2组患者围术期相关指标的比较2组患者均顺利完成手术。与腹腔镜组相比,机器人组保肛率高,手术时间短,侧方清扫时间短,出血量少,排气时间短;术后住院时间短,淋巴瘘发生率低;2组盆腔感染及肠梗阻等并发症的发生率差异无统计学意义。见表2。
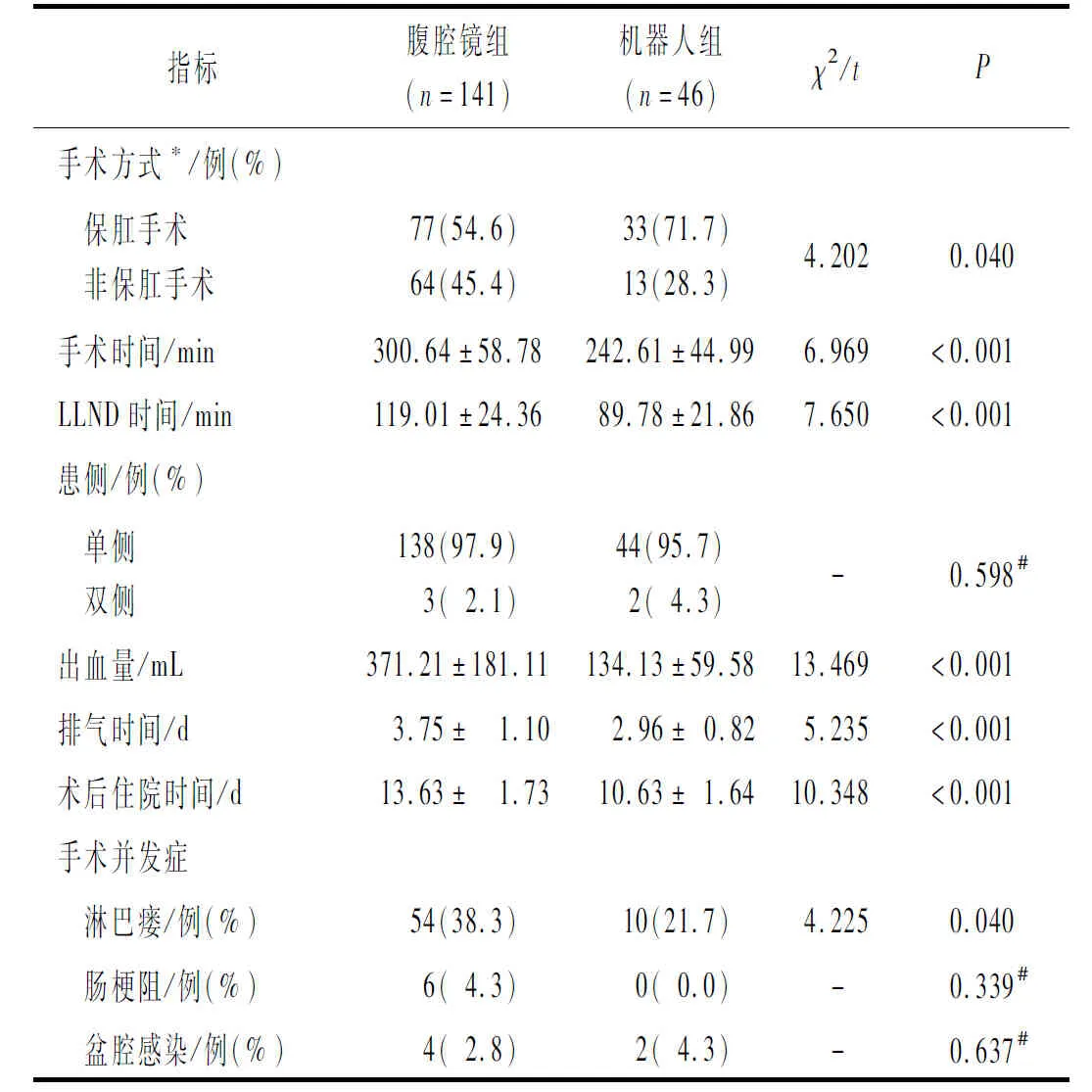
表2 2组患者围术期相关指标的比较
2.3 2组患者术后排尿功能和性功能比较机器人组术后性功能及IPSS评分均优于腹腔镜组,见表3~5。

表3 2组IPSS评分比较 分

表4 2组女性患者术后FSEI-5评分的比较 分

表5 2组男性患者术后IIEF-19评分的比较 分
2.4 2组术后病理结果的比较2组患者在术后TNM分期,肿瘤分化程度,环周切缘性质及神经、脉管侵犯等病理结果方面差异无统计学意义(P>0.05),但机器人组在侧方淋巴结清扫数方面优于腹腔镜组。见表6。
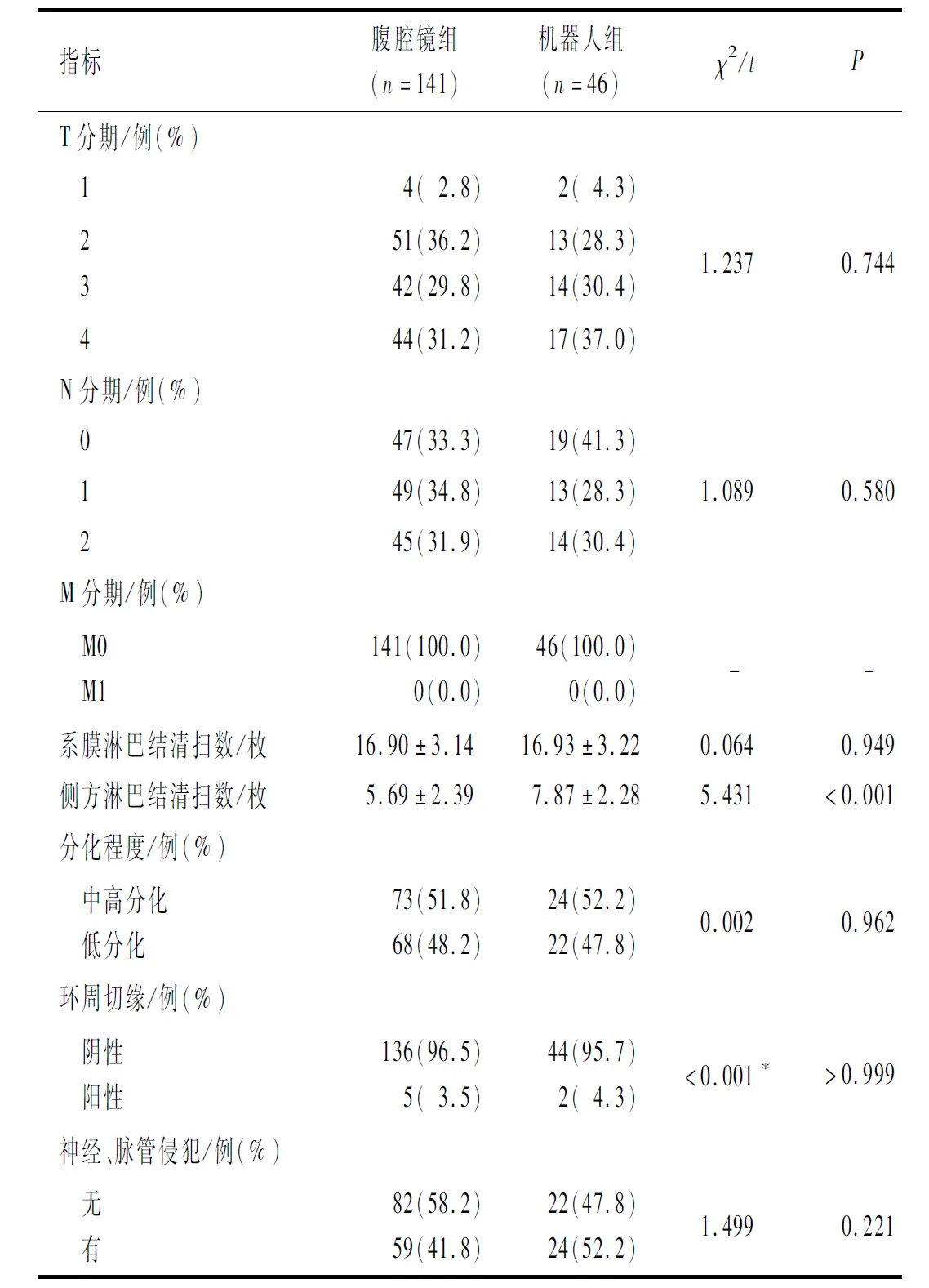
表6 2组术后病理结果比较
2.5 2组生存情况比较2组OS和DFS生存曲线差异无统计学意义(χ2=0.003、0.005,P=0.958、0.946),见图2。
3 讨论
以往TME联合LLND多以开放手术为主,创伤大、出血量多,影响患者术后恢复,且受限于狭窄的解剖空间,开放手术很难获得良好的视野,手术难度较高,患者术后往往伴随较严重的排尿及性功能障碍。随着微创手术的发展,腹腔镜手术和机器人手术系统先后应用于临床。我科开展直肠癌根治术联合LLND较早且较为成熟,故以此为基础比较了机器人手术系统与腹腔镜辅助下TME联合LLND的应用效果。
本研究结果显示,机器人组在保肛率、手术时间、LLND时间、出血量、吻合口瘘等方面均优于腹腔镜组,这与Yamaguchi等[6]的报道一致。机器人手术系统拥有多关节仿真手腕,可七角度540°多维度自由旋转,为精细操作特别是狭窄盆腔内的操作创造了条件,对比腹腔镜固定角度器械更具优势。此外,机器人手术系统的镜头及第一操作臂均由术者控制,可有效消除传统腹腔镜手术“扶镜手”及“第一助手”配合不熟练的弊端,从而提高了手术效率。但也有报道[7]显示,机器人手术系统手术时间较腹腔镜手术延长,LLND时间接近,我们认为这可能与机器人手术系统学习曲线有关。机器人手术系统裸眼3D立体视觉系统可放大15倍视野,在提供良好视野及细节展示的基础上减轻术者的视觉疲劳,帮助术者在术中及时发现淋巴瘘等异常情况并处理,从而降低了围术期淋巴瘘的发生率,这一结果与相关研究[8]一致。自2014年引入首台机器人手术系统以来,我科已完成1 500余例结直肠手术,手术相关技术及配合已成熟。在术后恢复方面,我们发现机器人组术后排气时间、住院时间均短于腹腔镜组,这可能与机器人手术系统的操作可以更加精细有关,避免了传统手术中对肠系膜及直肠的大力牵拉,同时手术时间缩短又降低了腹腔炎症反应的发生率[9]。
LLND操作可能损伤包括盆腔内脏神经在内的自主神经,导致排尿功能及性功能障碍,因此有关LLND的适应证目前也存在较大争议[10]。LLND的同时保留盆腔自主神经可有效降低相应功能障碍[11],但是想要确保肿瘤环周切缘阴性,狭窄的盆腔深处手术损伤内脏神经及下腹下丛神经很难避免,而机器人手术系统可更好地保护神经,这与国外研究[12]结果一致。本研究结果显示,机器人组在IPSS评分、性功能评分方面均优于腹腔镜组。原因应该有以下几点:第一,目前尚无有效的系统或机制来配合手术器械用于术中自动发现识别神经,机器人手术系统具有更高的放大倍数、更稳定的操作系统以及更合理的人机工程学设计,可为术者提供更清晰的术野,仿真模拟术者的操作动作,过滤无效震颤,尽可能避免误操作引起神经损伤,从而最大程度保护自主神经免受破坏;第二,机器人手术系统具有更好的抓持效果,随着术者手术经验的积累,能以较小的抓持力提供较高的术野暴露;第三,膀胱下动脉联合切除是LLND术后排尿功能障碍的危险因素,机器人手术系统下LLND可更好地处理包括这些血管在内的侧盆壁结构,从而更好地保护泌尿生殖功能[13]。
在病理学结果方面,2组在TNM分期、肿瘤分化程度以及系膜淋巴结清扫数方面差异无统计学意义,这与相关研究[14]结果一致,说明机器人手术系统可以达到与腹腔镜同样的根治效果。
在预后方面,机器人组OS、DFS生存曲线与腹腔镜组差异无统计学意义,这可能与本研究病例数偏少及随访时间短有关,但在一定程度上反映了机器人手术系统的安全性及可行性。
本研究存在一定的局限性。第一,本研究为回顾性研究,患者手术方式是由主治医生和患者及家属共同决定,而不是随机。第二,存在样本量偏小的问题,且该研究为单一中心研究。第三,术前确定患者是否行LLND主要根据高分辨率MRI来确定:当侧方最大淋巴结短径>5 mm,则选择行LLND,而未充分考虑其他恶性特征,这可能给结果带来偏倚,这项研究需要我们同CT、MRI等影像学医师联合开展前瞻性研究来确定可靠的、可执行的侧方淋巴结转移诊断标准。第四,随访时间较短。
总之,机器人手术系统辅助下TME+LLND治疗低位直肠癌联合侧方淋巴结肿大安全、可行。
猜你喜欢
社会科学战线(2022年4期)2022-06-15
介入放射学杂志(2021年5期)2021-05-20
心电与循环(2021年1期)2021-02-05
爱你(2017年8期)2017-11-24
中国医药指南(2017年3期)2017-11-13
当代医药论丛(2017年22期)2017-04-12
西南军医(2016年3期)2016-01-23
中国继续医学教育(2015年6期)2016-01-07
山东第一医科大学(山东省医学科学院)学报(2015年3期)2015-06-07
中国当代医药(2015年30期)2015-03-01
