
局部加权拟合的无人机遥感影像多尺度检测
2023-12-16 08:49王少军王辰曦
机械设计与制造工程 2023年11期
雷 磊,张 智,王 良,王少军,王辰曦
(1.国网陕西省电力公司电力科学研究院,陕西 西安 710100) (2.国网(西安)环保技术中心有限公司,陕西 西安 710100) (3.国家电网有限公司特高压建设分公司,北京 100052) (4.国网陕西省电力公司,陕西 西安 710048)
无人机拍摄遥感影像技术是监测地面物体的重要技术之一[1-3]。无人机在航拍过程中有时会发生颠簸,或因天气、地形等因素的影响导致拍摄的遥感影像发生几何畸变,使后续信息分析工作无法正常开展[4],影响遥感影像信息的检测精度。
无人机遥感影像检测中,对遥感影像的边缘检测至关重要,有利于分析影像的相关信息[5-6]。以往遥感影像检测方法局限性很大,如刘英杰等[7]提出的Cascade R-CNN并行目标检测算法,虽然在小目标的检测中具有较好的优势,但计算过程过于复杂,导致大目标检测效率低,影响检测结果;兰传琳等[8]提出的先验模型优化检测方法,利用对目标轮廓的提取实现检测,但该方法操作繁琐,导致检测效果不佳。
为此,本文提出基于局部加权拟合算法的无人机遥感影像多尺度检测方法,通过控制遥感实施范围划定局部校正区域,同时添加辅助控制点对其进行改进,实现无人机遥感影像多尺度、多方向检测。
1 改进局部加权拟合算法的无人机遥感影像处理
1.1 改进局部加权拟合校正算法
无人机遥感影像的控制点中心用O表示,控制圆由N个控制点组成,其半径为R。为了得出无人机遥感影像控制点中心O的具体位置,需要5个控制点进行控制点的局部表面拟合。
通过添加辅助控制点,保证控制点数量充足,以解决无人机遥感影像控制点稀少的问题,添加方法如图1所示。
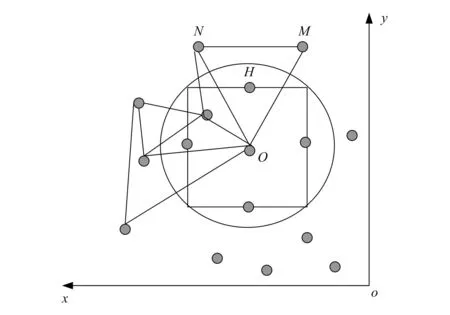
图1 添加辅助控制点
由图1可知,添加控制点需要先找出圆的内接正方形,添加的控制点为正方形每边的中点。在无人机遥感范围内,控制点的位置是可变的[9-10]。寻找距离添加控制点最近的三角形,该三角形可由多个控制点连接而成,图中离H点最近的三角形为△OMN。在畸变空间,通过最近三角形△OMN的3个顶点构建一阶仿射校正模型,计算所添加控制点H的共轭位置。
1.2 改进局部加权拟合校正算法流程
改进局部加权拟合校正算法流程如下:
Step 1,无人机遥感影像处理其中重要的一环是进行几何校正,通过确定校正影像中半径为R的控制圆确定控制点位置,在控制圆内控制点数量不符合要求时,添加辅助控制点。
Step 2,(x,y)为准备校正的无人机遥感影像内的控制点坐标,经多项式拟合成校正后的控制点坐标(Xi,Yi),fi(x,y)为x分量局部映射函数,ei(x,y)为y分量局部映射函数。为计算q阶多项式系数,将控制圆内的(N+1)个控制点导入式(1)中进行计算:
(1)
式中:aij、bij为多项式系数。校正准确率和效率由多项式阶数q决定。
Step 3,各控制点的权重函数用Wi(D)表示:
(2)
(3)
式中:一般o=4,Dn为参考距离。当0≤D≤1时,权重函数为归一化方程。
Step 4,加权求解邻近控制点,得出无人机遥感影像内各点(x,y)的映射(X,Y):
(4)
式中:M为无人机遥感影像内的控制点最大数量。
2 遥感影像多尺度检测技术
2.1 形态学重构
为提升无人机遥感影像边缘特征提取效果,通过形态学重构方法对边缘模糊或被侵蚀后的遥感图像进行边缘修复。影像用p表示,掩模用u表示,且p⊆u,利用p重构u流程如下:
1)标记影像p初始化,初始影像为z1;
2)获取多方向多尺度圆形结构元素B;
3)执行zk+1=(zk⊕B)∩p,直到zk+1=zk为止。
相关资料表明,重构运算在保留遥感影像结构元素的同时可消除遥感影像的噪声。
纹理复杂的景物若加宽纹理宽度会导致无人机遥感影像边缘模糊,因此通过膨胀型半梯度方法去除原影像灰度,筛选出单像素宽度,以提高影像边缘清晰度。通过多尺度结构元素实施边缘检测,提取影像边缘,达到降噪效果。若梯度图像用ζ表示,则膨胀型形态学梯度用ζ=(p⊕B)-p描述。
2.2 自适应均衡
由于多尺度、多方向结构元素检测影像效果不同,因此需要均衡化影像灰度值方差。影像各像素点的灰度值分布可通过影像灰度值方差表示,且该值越大,边缘信息越多,分布越分散。灰度值方差s2计算公式为:
(5)
式中:n为总像素数,h1,h2,…,hn为各像素点灰度值,h为平均灰度值。

(6)
自适应均衡边缘灰度影像E为:
(7)
式中:ui为遥感影像,遥感影像通过对影像E进行自适应二值化求解可得出。
3 实验分析
3.1 实验方案
为验证本文技术的性能,选取某地区的2幅无人机遥感影像作为实验对象,在MATLAB 8.0环境下进行实验验证。同时选取基于Cascade R-CNN的并行特征金字塔网络无人机航拍图像目标检测算法(文献[7]方法)、基于先验模型优化的无人机遥感图像中几何轮廓目标检测方法(文献[8]方法)作为对比方法。其中影像1控制点位置分布如图2所示。

图2 无人机遥感影像1控制点位置分布
(8)
信息熵H计算公式为:
(9)
式中:L为影像像素点总行数,K为影像总列数,F(i,j)为影像的第i行第j列的灰度值,ρr为灰度级为r的概率,ρi为灰度级出现i的概率。图像平均梯度的大小直接影响边缘信息的提取效率,平均梯度越大,边缘信息提取效率越高,信息熵越大,影像信息越丰富。
3.2 无人机遥感影像配准度分析
采用本文方法对实验对象中无人机遥感影像1实施几何校正,对比应用本文技术前、后的镶嵌效果,如图3所示。

图3 镶嵌效果
由图可知,采用本文技术对无人机遥感影像1被标记区域部分实施几何校正后,影像放大图中可清晰看出影像镶嵌接边处,影像配准度较高。
3.3 无人机影像边缘检测结果
比较文献[7]方法、文献[8]方法以及本文方法进行无人机影像边缘检测所用的运算时间以及平均梯度、信息熵,其均值统计结果见表1。
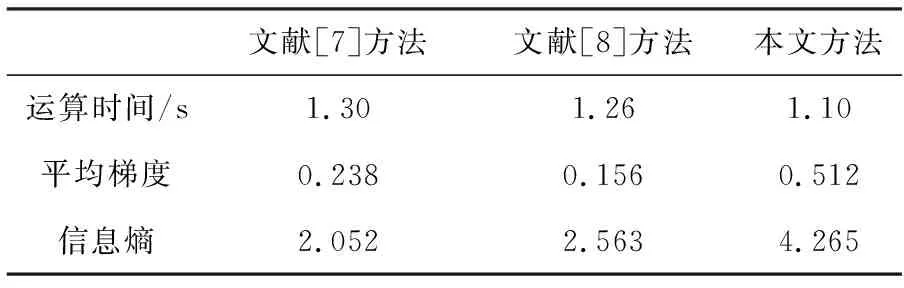
表1 无人机影像边缘检测结果
由表1可知,3种方法的运算时间没有太大差距,本文方法的平均梯度和信息熵分别为0.512、4.265,均高于两种对比方法,说明本文方法可快速实现影像边缘的提取,且包含的影像信息量较多,提取影像效果较优。
分别采用3种方法对影像2进行边缘检测,结果如图4所示。
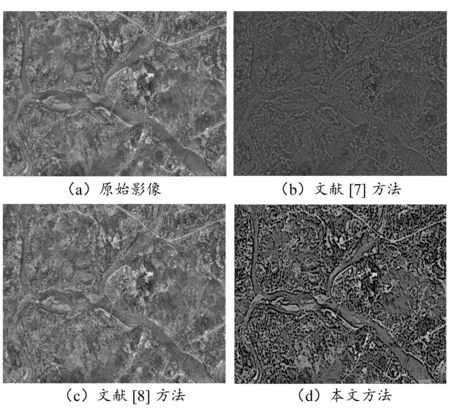
图4 边缘检测结果
由图可知,文献[7]方法的影像边缘检测效果比较差,色彩昏暗,文献[8]方法的影像边缘检测效果一般,虽然检测出影像大部分边缘,但细节提取效果较差,视觉效果比较模糊。本文方法在边缘细节提取上效果较好,可完整检测出原始影像边缘,纹理清晰、色彩明亮,影像内噪声较少。
4 结束语
为提高无人机遥感影像检测效率,本文提出了基于局部加权拟合算法的无人机遥感影像多尺度检测方法。利用改进局部加权拟合算法对无人机遥感影像实施几何校正后,通过多尺度自适应均衡边缘检测技术提取遥感影像的边缘特征实现无人机遥感影像多尺度检测。实验结果表明,本文方法充分利用遥感影像局部信息,提高了控制点的点位精度,图像边缘检测性能优良。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
国学(2020年1期)2020-06-29
数学物理学报(2017年6期)2018-01-22
北京航空航天大学学报(2017年4期)2017-11-23
摄影之友(影像视觉)(2017年1期)2017-07-18
自动化学报(2017年5期)2017-05-14
中国工程咨询(2017年12期)2017-01-31
光学精密工程(2016年1期)2016-11-07
安徽地质(2016年4期)2016-02-27
