
基于模糊PID的轨道巡检机器人速度环控制器设计
2023-12-16 08:49:50陈昌进赵晓伟
机械设计与制造工程 2023年11期
杜 冲,陈昌进,许 锋,赵晓伟
(浙江海宁轨道交通运营管理有限公司,浙江 海宁 314400)
为保证列车平稳运行,轨道专业人员需要定期对轨道几何尺寸进行检查。目前静态检查的主要工具为普通轨距尺,存在工作量大、效率低、误差大等缺点。为减少以上弊端,研发出一种高精度且具备自动巡航功能的轨道智检小车十分必要。近年来,随着智能技术的发展,轨道巡检机器人得到广泛应用,大幅度提高了轨道巡道工的工作效率和线路的检测精度,为保障轨道交通运输安全做出重要贡献。目前,国内推出的轨道巡检机器人普遍采用基于直流双闭环的调速系统对驱动电机进行控制,如孔健生等[1]针对电压不平衡工况,提出一种适用于CLLC型交直流母线接口变换器的控制策略,可保证三相电流平衡;范子彦等[2]基于模糊比例积分微分(PID)控制,利用直流双闭环调速系统对油茶果采摘机阀控液压马达进行控制,解决了机器人在电压或转矩出现较大波动时转速调节器饱和的问题;罗继曼等[3]基于双闭环调速系统与偏差耦合协调控制策略,自动修正机器人的运动姿态,实现了机器人的协调运动控制;张天宇等[4]在基于逆动力学的双闭环模糊PID控制策略下,对平脚轮式全向移动平台的运动控制进行设计,能够快速使机器人速度到达期望速度;沈显庆等[5]根据P+前馈控制原理,设计了一种双闭环P+前馈控制算法,能够快速跟随机器人规划的路径。但在实际应用中,由于轨道巡检机器人工况复杂,不同工况下参数设置不同,且其实际运行速度随时间变化呈现出非线性特征,若采用传统双闭环控制难以对速度偏差较大的机器人进行准确实时控制。模糊PID控制算法,既可以控制线性系统,也可控制非线性系统,因此利用模糊PID控制的优势,对轨道巡检机器人速度控制参数进行实时优化。
1 巡检机器人整体方案
巡检机器人主要用于轨道情况检测,结合其功能参数要求,本文对其总体方案框架进行设计,如图1所示。
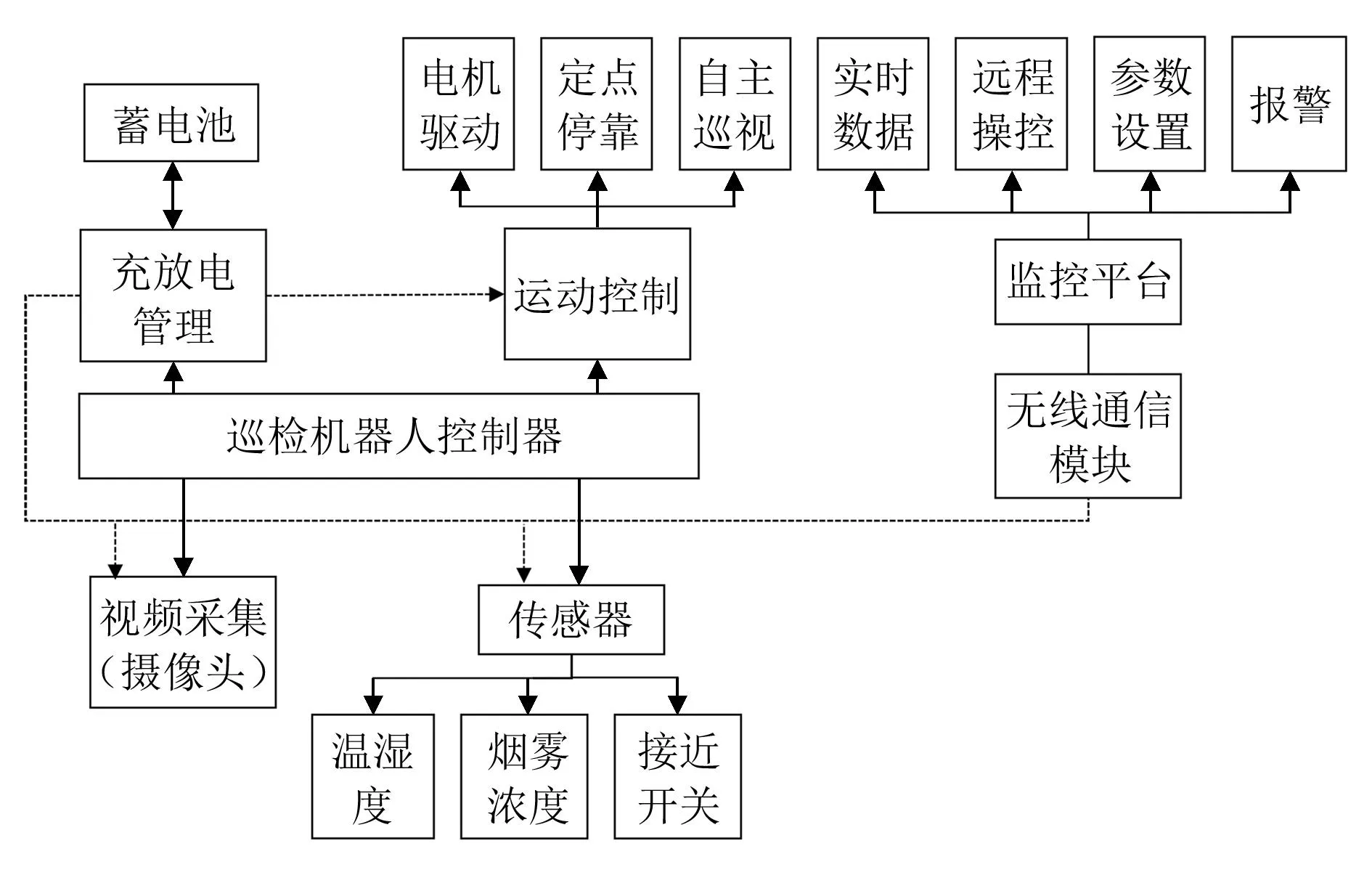
图1 系统总体方案框架
2 硬件系统设计
2.1 控制系统设计
控制系统通过可编程逻辑控制器(PLC)进行协调分工,具体结构如图2所示,PLC相关参数见表1[6]。

表1 PLC相关参数

图2 机器人控制系统结构
2.2 运动执行系统设计
2.2.1水平驱动系统
水平驱动系统是机器人的动力来源,直接影响机器人的性能[7]。由于机器人对运动的平稳性要求较高,而直流无刷电机具有良好的制动特性,可实现无极变速,且调速平稳,在速度较低时也能保持大转矩,因此本文选用直流无刷电机作为水平驱动系统的动力来源。其中,直流无刷电机质量为7 kg,最大运行速度为0.6 m/s,加速时间为0.5 s,驱动轮半径为30 mm。
基于以上确定的电机型号,在运行过程中,当轨道水平时,轨道巡检机器人受到阻力Fs:
Fs=μmg
(1)
式中:μ为电机驱动轮与导轨间的摩擦系数,取值0.1;m为驱动电机质量,取值7 kg;g为重力加速度,取值9.8 m/s2。由此可得,Fs=6.8 N。
当轨道存在一定坡度θ(θ≤30°)时,机器人会受到爬坡阻力,则滚动摩擦力F1可表示为:
F1=mgsinθ+μmgcosθ=40.26(N)
(2)
由表2可知,机器人需要在启动后0.5 s内从0加速到以35 m/min的速度行驶,其加速度a和加速阻力F2大小为:
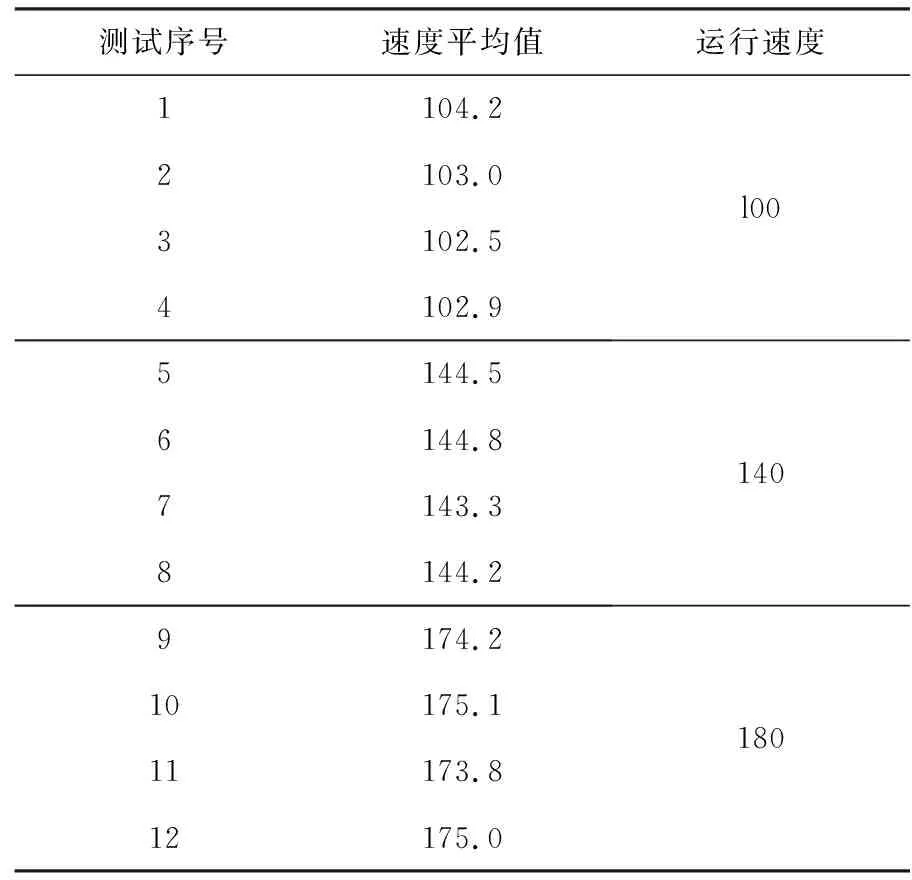
表2 电机速度测试值 单位:r/min
a=(V0-0)/t0=1.17(m/s2)
(3)
F2=ma=8.17(N)
(4)
式中:V0为最大运行速度,t0为从0开始到最大运行速度的时间。
由式(1)~(3)可得机器人运行时总阻力F:
F=Fs+F1+F2=54.34(N)
(5)
且电机的减速比i满足:
i≤2πnr/V0
(6)
式中:n为电机转速,取值1 800 r/min;r为驱动轮半径。
由此可得i≤12.69,差速机构传动效率为0.97,电机提供的牵引力矩T=0.12 N·m,即电机应选用B2-10L18-8D,配套减速机选用2GN-10K,同时选用小功率的BLD-5驱动器作为直流无刷电机驱动器。
2.2.2升降驱动系统设计
升降机构通过搭载摄像机记录轨道巡检现场情况,并将采集的图像传输到监控平台。根据轨道巡检机器人工作需求,升降驱动系统参数如下:定位精度为10 mm,可旋转角度为360°,俯仰角度为120°,升降高度为30 mm,升降速度为0.1 m/s。
通常情况下,升降机构为匀速运动,因此其需要的驱动转矩Ta可表示为:
(7)
式中:Q为轴向载荷,取值49 N;P为丝杠导程,mm;η为丝杠机构工作效率,取值0.94。已知升降机构最大负载质量为4 kg,则Ta=0.11 N·m。因此,升降驱动系统的电机、驱动器、减速机可选用与水平驱动系统相同的型号。
2.3 调速系统设计
调速系统负责根据相关指令完成轨道巡检机器人启动、加速、减速、停止等动作,具有良好的调节能力和启停特性[8]。轨道巡检机器人期望在工作时能快速启动,并在扰动情况下通过自身调节实现转速恒定,达到运行平稳的目的。因此,对电机速度的控制采用双闭环调速系统[9-12]。
2.4 模糊PID控制器设计
2.4.1模糊PID控制基本原理
模糊PID控制结构框图如图3所示[13]。图中,y表示系统设定值,精确量;e、ec表示系统偏差及偏差变化率,精确量;E、EC表示经过模糊量化处理后的e与ec;U表示控制作用;u表示对U进行模糊判决得到的模糊PID控制器输出,精确量;t为时间。

图3 模糊PID控制结构框图
2.4.2基于模糊PID的轨道巡检机器人控制器设计
1)输入/输出模糊集确定。
控制器的输入变量为e和ec,输出为比例、微分、积分环节参数的修正量ΔKP、ΔKD、ΔKI。由于轨道巡检机器人电机转速范围为[0,1 800]r/min,因此e和ec的取值范围分别为[-60,60]和[-12,12],ΔKP、ΔKD、ΔKI的取值范围分别为[-2,2]、[-2,2]、[-3,3]。为便于建立模糊集合,根据文献[14],将输入和输出量的取值范围定义为各量的模糊论域,则控制器的输入模糊论域为[-6,6],模糊子集为{NB,NM,NS,ZO,PS,PM,PB}={-6,-4,-2,0,2,4,6},分别表示负大、负中、负小、零、正小、正中、正大;输出模糊论域为[-3,3],模糊子集为{NB,NM,NS,ZO,PS,PM,PB}={-3,-2,-1,0,1,2,3}。
2)隶属函数确定。
隶属函数的作用是确定速度偏差e所属模糊子集区域,其直接影响模糊PID控制器的控制结果。当速度偏差较小时,应采用高分辨率模糊集合;当速度偏差较大时,应采用低分辨率模糊集合[15]。本文选用三角形隶属函数作为控制器的隶属函数。
3)模糊控制规则制定。
模糊控制规则制定的意义在于根据相应规则,实现对相应参数的调整。根据轨道巡检机器人实际工况可知,将轨道巡检机器人模糊PID控制规则分为NB、NM、NS、ZO、PS、PM、PB,表示执行7个不同的动作。
基于上述分析,模糊PID控制器的控制过程如图4所示。当速度偏差较小时,系统采用比例积分(PI)控制;当速度偏差较大时,系统采用模糊PID控制。
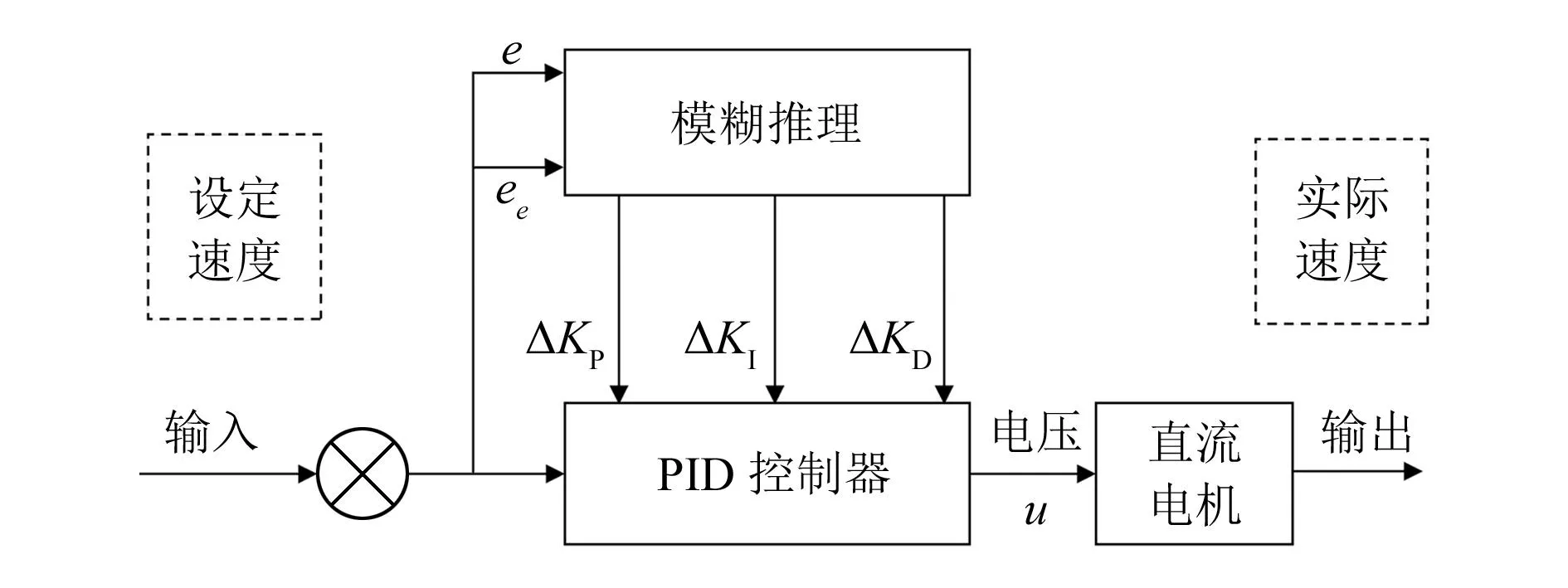
图4 模糊PID控制过程
由图4可知,采用模糊PID控制后,轨道巡检机器人可在不同环境下执行不同动作。
3 仿真测试
3.1 实验环境
为验证模糊PID控制器是否可行,本次实验在MATLAB/Simulink中建立仿真模型,如图5所示。

图5 模糊PID控制器仿真模型
3.2 结果与分析
将模糊PID控制器与传统的双闭环控制器的控制结果进行对比,结果如图6所示。由图可知,空载和负载状态下,模糊PID控制器效果均优于传统的双闭环控制器效果;当机器人电机空载时,模糊PID控制器响应时间更短,运行速度更加稳定,超调量趋于0;负载状态下,模糊PID控制速度波动幅度更小。由此说明,在模糊PID控制下,电机抗干扰能力更好,可较快恢复速度,即模糊PID控制器设计合理,适用于轨道巡检机器人速度控制。

图6 不同控制器下电机转速控制的仿真结果对比
3.3 鲁棒性测试
3.3.1实验平台
为验证模糊PID控制器在轨道巡检机器人中的实际应用效果,结合轨道巡检实际工况,将图1的轨道巡检机器人硬件配置为:西门子PLC控制器,2个驱动电机,RFID定位,24 V锂电池,漫反射光电开关,Rogid-HTIAC型温湿度传感器,BITS烟雾传感器。
3.3.2基于模糊PID控制器的机器人调速控制测试
采用模糊PID控制器对设计的轨道机器人调速进行控制,通过驱动器测速方法,即通过连接驱动器和PLC读出脉冲方波频率,实现速度测算。
实验采用带有霍尔传感器的直流无刷电机,其对应6种状态。具体测试方法如下:首先连接驱动器上的FG接口与PLC输入端口,当脉冲为低电平时断开连接端口,当脉冲为高电平时导通连接端口;然后利用PLC中计数器得到频率;最后根据测速公式即式(8),得到电机转速n。
(8)
式中:f为频率,Hz;p1为电机磁极对数。
为避免测试结果的随机性,实验时分别在直流电机额定速度为100 r/min低速(n1)、140 r/min中速(n2)、180 r/min高速(n3)3种情况下连续运行2 min,并将速度平均值作为最终结果。图7为采用模糊PID控制器的电机实时运行速度曲线,表2为采用模糊PID控制器测试得到的电机平均速度测试值。

图7 速度测试值曲线
由以上结果可知,机器人可自动调节电机运行速度,并使电机转速趋近于额定转速。由此说明,本文设计的轨道巡检机器人满足速度要求,可实现稳定运行。
4 结束语
综上所述,本文所设计的基于模糊PID控制器可及时调节轨道巡检机器人速度,有效提升了机器人的响应速度和稳定性,满足系统需求,具有一定的合理性和可行性,可应用于实际轨道巡检机器人的运动控制。但由于条件限制,本文仅对机器人控制系统进行了测试,未涉及对组装成完整的机器人机械结构进行测试,在下一步将加强这方面的研究。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
空间科学学报(2020年6期)2020-07-21 05:37:04
空间科学学报(2020年6期)2020-01-08 16:50:22
环球时报(2019-12-05)2019-12-05 05:13:15
铁道通信信号(2019年4期)2019-10-10 03:42:56
通信电源技术(2016年1期)2016-04-16 04:57:31
系统医学(2016年8期)2016-02-20 02:55:08
