
基于改进LGWO的关节电机滑模预测电流控制*
2023-12-13 12:12江正锐何志琴
传感器与微系统 2023年12期
江正锐,曹 勇,何志琴
(贵州大学电气工程学院,贵州 贵阳 550025)
0 引 言
永磁同步电机(permanent magnet synchronous motor,PMSM)作为外骨骼系统提供动力的关键部件,具有高效率、高功率密度等优势[1]。为满足关节电机对转速、力矩和位置等高性能伺服控制的需求,在位置-转速环中设计了滑模预测电流控制器。然而控制器的参数是否匹配直接影响系统的性能。为避免参数的反复试凑,研究者将粒子群算法[2]、遗传算法[3]、蚁群算法[4]和猴群算法[5]等智能算法应用于参数优化问题中。
灰狼优化(grey wolf optimization,GWO)算法是Mirjalili 等模仿灰狼的领导阶层和狩猎机制提出的启发式算法[6]。为解决GWO 容易陷入局部最优的缺陷,文献[7]在收敛因子中加入了随机项,并应用在PMSM 的滑模自抗扰控制中,但调节过程没有详细叙述;文献[8]采用正态云模型对种群位置进行更新,并应用在PMSM 的多参数识别中,但算法容易过早收敛;文献[9]提出了嵌入莱维飞行的灰狼优化(Lévy-flight embedded grey wolf optimization,LGWO)算法,但算法中种群大小的设置可能与问题复杂度失配,在具体应用中效果不佳,且种群初始化过于随机,无法覆盖整个搜索空间,从而导致可能遗漏最优解。
根据上述问题,本文提出了一种改进的LGWO 算法,对控制器中的参数进行优化,减少参数设置对人工经验的依赖,提高外骨骼关节电机的动态特性。
1 PMSM 滑模预测电流控制模型
根据文献[10]可得出表贴式PMSM 的数学模型为
式中ud,uq和id,iq分别为定子电压、定子电流在d-q轴坐标系下的分量;Rs为定子电阻;ψf为永磁体磁链;L为定子电感;ωe为电气角速度。
在控制系统中,采样时间Ts足够短,采用一阶欧拉前向离散化方法对式(1)进行离散化处理,整理得
当控制系统对参考电流进行无差拍跟踪时,则有:i(k+1)=i*(k),其中为d-q轴给定电流,从而控制输出为
对于转速环中PID 控制鲁棒性不强的缺陷,在控制系统中采用滑模控制,选择如式(5)所示的积分滑模面减小稳态误差
式中c为大于0 的常数,x1为系统状态变量表示给定转速和实际转速的误差。
趋近律如下
式中 Sigmod(s)=2/(1 +e-as)-1;a,k1,k2为设计参数。
2 LGWO 改进策略
2.1 LGWO原理
灰狼的社会等级是一个金字塔型,自上而下为α,β,δ,ω共4个等级的狼群且数量递减。为解决GWO 容易过早陷入局部最优的缺陷,将具有短距离搜索与偶尔较长距离游走特点的莱维飞行因子引入到灰狼种群的搜索过程中,即LGWO。在LGWO 中δ 狼在种群中的作用被其他狼代替,即算法中只包括α,β,ω狼,在算法中依次代表最优解、次优解和其余解。
灰狼种群包围猎物的行为用式(7)描述
式中D为灰狼与猎物之间的距离;XP,X分别为猎物位置向量和灰狼的位置向量;t为当前迭代次数;A,C为系数向量,计算公式如下
式中r1,r2为0 ~1 之间的随机向量;a为收敛因子,计算公式为:a=2(1 -t/Tmax),Tmax为设置的最大迭代次数。
在狩猎过程中ω层狼群跟踪α,β狼群的数学模型为
式中Dα,Dβ为ω灰狼分别与α层和β层狼群的距离。
ω灰狼分别计算其向三者的移动距离,以此向包围圈移动,移动公式为
ω狼的位置由α,β共同决定
其中,Levi(β)的表达式为
式中u,v为randn(1,d)正态分布的随机数;ρ一般取1.5。γ的计算方式为
2.2 算法改进策略
在实际应用中,不同问题的解空间大小可能存在差异,凭借经验设定的种群数目会对算法性能产生影响,种群数目太小会产生较大的采样误差;太大则会造成冗余计算,故而需引入一种自适应的种群设置策略。标准差可以评估数据的波动程度,在优化算法中,如果适应度的标准差过大,说明个体的适应度波动较大,此时可以考虑增加群体大小以增加搜索空间的覆盖范围;反之,减小群体大小以提高搜索效率。
设原始种群大小为N,在第t代种群的适应度值为Ji(t),其中i=1,2,…,N;则第t代的适应度标准差为
式中(t)为第t代种群的平均适应度值。
将上一代和当前代的适应度标准差之比如式(15)所示作为种群数目大小的调整因子,当比值大于1时,增加种群数量;反之,则减小种群数量
为解决传统LGWO初始化搜索空间过于随机的问题,在构造搜索空间引入佳点集理论,通过服从均匀分布,使个体更加均匀地分布在搜索空间内,从而更好地搜索未被开发的区域。
定义Gs是s维的欧氏几何空间,佳点集Pn表示为
其中,i=1,2,3,…,n;r为佳点且r∈Gs,一般取r={2cos(2πk/p),1≤k≤s};p为(p-3)/2≥s的最小素数。
将佳点集映射到灰狼种群的搜索空间中有
式中ubj,lbj分别为当前维度的上界和下界。
对于系数向量A,当|A|≥1 时,表示灰狼进行全局搜索潜在猎物;当|A|<1 时,表示灰狼将逐渐包围并捕获猎物,即进行局部搜索。而A取决于收敛因子a的值,且a在搜索过程中线性递减。而PMSM 控制过程是非线性的过程,采用线性收敛算法解决非线性问题效果不佳。故本文引入新的非线性的收敛因子
如图1 所示,对收敛因子引入非线性策略后,在迭代的初始阶段,其斜率较为平缓,有利于发散寻找潜在猎物;在迭代收敛阶段,其斜率较大,有利于快速包围捕捉猎物。

图1 收敛因子对比
算法实施伪代码如下:
Input:第一代灰狼数量N,最大迭代次数Tmax,目标函数F
Output:系统稳定的最优解
1)按照式(17)初始化灰狼群体位置及灰狼个体;
2)初始化迭代次数T=0,对式(8)及非线性收敛策略(18)进行初始化;
3)whileT<Tmaxdo:
4) for灰狼个体in群体do:
5) 计算每个个体的适应度值排序,选择目标灰狼作为搜索方向;
6) 根据式(9)~式(11)更新灰狼个体的位置;
7) 根据式(18)计算系数向量A,C的值;
8) 如果新位置的适应度值更优,则更新最优解;
9) 边界修正;
10) 根据式(15)自适应因子调整群体数目;
11) End for
12) 迭代次数T=T+1;
13)End while
14)返回最优解。
3 仿真结果分析
本文以PMSM驱动的下肢外骨骼关节电机为研究对象,在MATLAB/Simulink中按照图2 结构框图搭建表贴式PMSM滑模预测电流控制系统,并分别使用GWO、LGWO及本文所改进算法对系统参数进行整定。
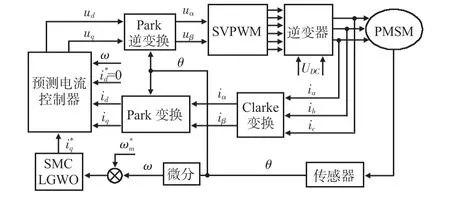
图2 PMSM矢量控制结构框图
仿真所采用PMSM 模型参数如下:定子电阻为2.875 Ω,定子电感为8.5 mH,永磁磁链为0.175 Wb,转动惯量为0.003 kg·m2,极对数Pn为4。
在图2的拓扑系统中,设置迭代次数为100,初代种群为30,3种算法在系统中的适应度曲线如图3(a)所示。为进一步对比不同算法下PMSM 的动态性能,设置仿真时间为0.4 s,额定转速为1 000 r/min,在0.3 s 后突加20 N·m负载。所得结果如图3(b)~图3(e)所示。

图3 3 种算法仿真结果分析
可见改进LGWO 在迭代15 次后收敛,且在迭代过程中收敛斜率较大,说明改进后的LGWO具有更快的收敛速度与寻优能力。
从表1和图3(b)中可以看出,在空载启动达到稳态时,改进LGWO的超调量为5 r/min,调节时间为0.02 s,均领先于GWO 的25 r/min、0. 022 s 和LGWO 的50 r/min、0.02 s。采用改进LGWO 的控制系统具有更低的转速超调和更短的调节时间,其动态特性得到进一步提升。
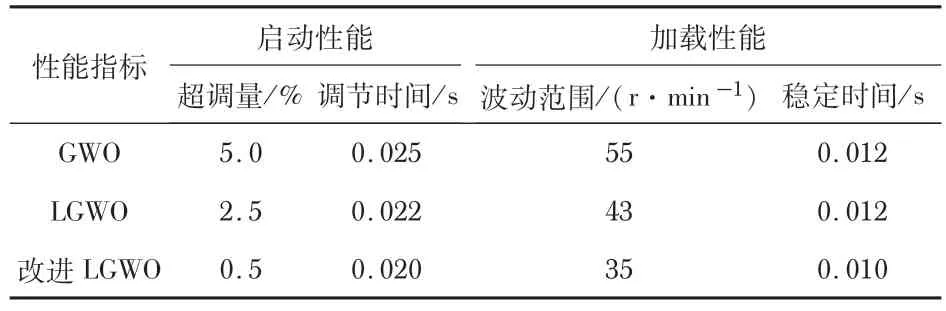
表1 系统启动和加载性能
为验证系统对外界干扰的鲁棒性,在0.3 s 突加负载后,由表1和图3(b)的0.3 s处局部放大图可以看出:改进算法波动最小为35 r/min,优于GWO、LGWO的55 r/min和43 r/min,且改进LGWO的恢复时间最短为0.01 s,即拥有更好的抗干扰能力。
从图3(c)和图3(d)中电磁转矩对比可知,在初始时刻,GWO和LGWO的波动较大,在突加负载时达到稳定的时间长,而改进LGWO 在初始时刻具有更小的转矩脉动,在突加负载时脉动最小,且恢复时间更短。由此可看出,所改进算法具有更优良的跟踪性能,提高了系统的鲁棒性。
为验证改进后算法能更好减少谐波分量,图3(e)给出了对A相电流在不同算法下的快速傅里叶变换(FFT)分析。GWO的A 相电流总谐波畸变(THD)为21. 26 %,LGWO的则为17. 49 %,而本文所改进算法的THD 为12.44%,明显抑制了电流谐波畸变,提高了关节电机的动态性能。
4 结 论
在外骨骼关节电机的滑模预测电流控制系统中,为提高电机的动态特性,提出使用改进LGWO 对控制器参数进行整定,从而避免了反复试凑,提高调节效率。首先,引入了自适应因子,可根据所求问题复杂度自适应调整灰狼种群大小,提高计算效率;其次,在种群位置初始化过程中,使用佳点集理论替代了传统的随机策略,使得灰狼遍布整个搜索空间,从而更好地搜索未被开发的区域;最后,在分析收敛因子作用的基础上提出非线性策略进一步提高搜索效率。实验结果表明,将本文所提算法应用关节电机的驱动控制中能够有效改善其动态性能,提高了系统的鲁棒性。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
小太阳画报(2019年1期)2019-06-11
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
数学大王·低年级(2018年5期)2018-11-01
快乐语文(2016年15期)2016-11-07
中国塑料(2016年11期)2016-04-16
读写算(中)(2015年6期)2015-02-27
华东理工大学学报(自然科学版)(2014年6期)2014-02-27
