
基于3D打印的隧道磁阻加速度计研究*
2023-12-13 12:12陈新茹
传感器与微系统 2023年12期
陈新茹,杨 波
(1.东南大学仪器科学与工程学院,江苏 南京 210096;2.东南大学微惯性仪表与先进导航技术教育部重点实验室,江苏 南京 210096)
0 引 言
隧道磁阻(tunnel magnetoresistance,TMR)效应由于其超高的灵敏度,一经发现就迅速渗透到微惯性器件研究领域,例如基于TMR效应设计的TMR 式加速度计具有超高的灵敏度,从而可以实现高分辨率的加速度检测。近年来,国内外学者研究了一系列基于TMR效应的位移加速度计,其中东南大学提出了基于电磁力反馈的三明治式TMR 加速度计[1]、基于3D 打印技术制作的单轴加速度计样机[2]和基于微机电系统(MEMS)工艺设计出TMR加速度计[3],推进了加速度计更进一步的研究。苏州大学提出一种悬臂梁式的TMR加速度传感器[4],达到了较高的分辨率,随后为了取得在噪声方面更加优良的性能,在调制降噪理论方面进行了一系列研究[5]。中国科学院大学[6]、中北大学[7]和多维技术公司[8]先后研究了基于TMR 效应的角度传感器,能够全方位检测输入的角加速度,并能够获得较高的角度精度。此外,针对巨磁阻效应进行了一系列理论研究与磁阻传感器的结构设计,实现了对压力[9]和加速度信号[10]的检测。荷兰埃因霍芬理工大学研究了一种基于巨磁阻效应的双轴加速度计[11],并对测量方法进行校正[12],可以实现平面内双轴向的输入加速度信号检查。这些研究证实了TMR效应在加速度计研究中的巨大潜力。
基于以上研究,本文提出了一种基于3D 打印的TMR加速度计的设计,后续电路系统实现对传感器信号的处理,实现对加速度信号的测量。
1 TMR加速度计的工作原理
1.1 总体结构
TMR加速度计总体结构设计如图1 所示,整体结构由上基板、TMR传感器、外框、敏感质量块结构、永磁性薄膜和下基板构成。2只TMR传感器位于永磁性薄膜正上方并沿着敏感轴方向布置,质量块受到外界加速度作用时,永磁体薄膜随着质量块在水平方向运动,TMR 检测到水平方向的磁场强度的大小并转换为输出电压值,通过测量输出电压来得到输入加速度的大小。
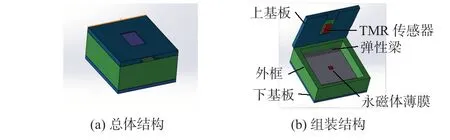
图1 加速度计总体结构设计
1.2 TMR效应
TMR效应是一种突破经典力学的微观量子力学效应,宏观表现为两层铁磁金属层与中间绝缘层构成的磁性隧道结会根据外界磁场特性变化而在高、低阻抗状态中切换[13]。其中,磁性隧道结是由铁磁层-非磁绝缘层-铁磁层材料构成的3层结构[14]。其中,非磁绝缘层像一条隧道,可以使两侧铁磁层的带电粒子在满足一定条件时穿过。TMR的基本工作原理为外界磁场影响自由层的磁矩方向,当自由层和钉扎层的磁矩方向平行时,电子隧穿过隧穿势垒层的概率较大,器件整体宏观表现为小电阻状态;而当自由层和钉扎层的磁矩方向反平行时,电子隧穿过隧穿势垒层的概率较小,器件整体宏观表现为大电阻状态,如图2(a)所示。
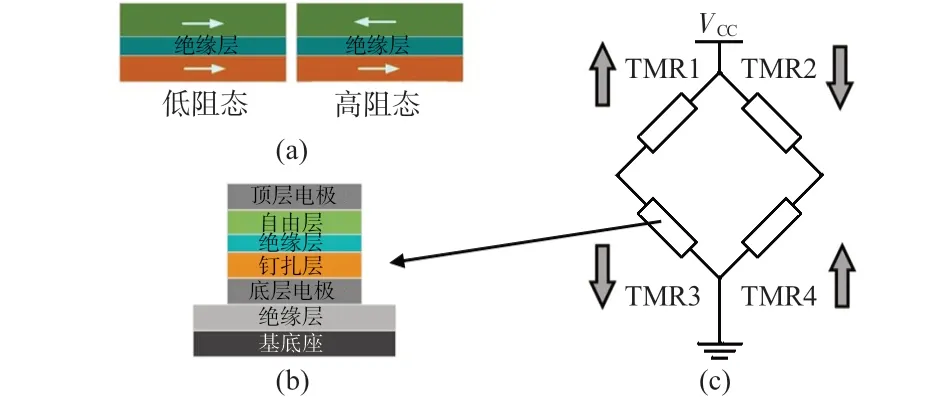
图2 TMR传感器结构示意
由此可见,TMR随着两铁磁层磁化方向的改变而变化,而且两侧铁磁层的磁化强度越强,TMR效应越明显。因此,可以通过施加外界磁场来改变两侧铁磁层的磁化状态,从而改变TMR值。如图2(b)所示,TMR主要由顶层电极、磁性隧道结、底层电极、绝缘层以及底座基板构成,磁性隧道结为主要磁场敏感结构。
图2(c)所示的TMR 传感器结构由4 个TMR 构成的惠斯通电桥,可以看出相邻布置的TMR检测外界磁场方向相反,对角布置的TMR检测外界磁场方向相同。TMR传感器的检测输出为Vout1与Vout2的电压差值。当未施加外界磁场时,TMR阻值均为R,Vout1=Vout2=VCC/2。当施加的外界磁场方向如图所示时,TMR1与TMR3阻值为R+ΔR,TMR2与TMR4阻值为R-ΔR,检测输出为
由此便可以实现磁场的差分检测,消除共模误差。
1.3 线性加速度计
本文设计的TMR式加速度计属于线性加速度计,其力学模型如图3所示,线性加速度计的基本力学模型可以等效为一种由质量块、阻尼器和弹簧构成的二阶系统。根据牛顿第二定律,可列出该系统的二阶微分方程如下所示
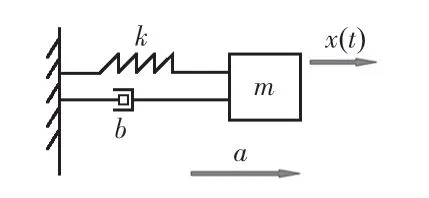
图3 线性加速度计力学模型
静态下的加速度计位移响应为
式中m,b,k分别为质量、粘性阻尼系数及弹性刚度;x(t)为质量块在加速度方向的位移;a为输入加速度。因此,线性加速度计可实现将输入加速度转化为位移的作用。
1.4 磁场强度
加速度计结构设计的磁场源为长方体永磁体薄膜,在z轴均匀磁化的条件下,根据毕奧-萨伐尔定理[15]以及分子环流假说[16],永磁体外部任意一点(x,y,z)沿y轴方向的磁场强度数学表达式为
式中M为长方体永磁性薄膜的磁化强度;μ0为真空介质的磁导率;a,b,c分别为长方体永磁性薄膜在x,y,z轴方向长度的1/2。式中F2的表达式为
进一步,当质量块和长方体永磁体薄膜在加速度作用下导致沿着y方向的微小位移时,则TMR传感器的磁场强度为
2 结构设计与仿真
2.1 结构设计
如图4所示,TMR 加速度计的主体结构由固定外框、U型弹性梁、敏感质量块3 部分组成。质量块左右两端分别通过1个U型弹性梁与固定外框结构连接,2 个U 型梁的开口方向相反。当外界加速度作用至敏感质量块时,由于U型弹性梁的作用,质量块会产生水平方向的位移,实现对输入加速度信号的转换。整体加速度计结构参数如表1。
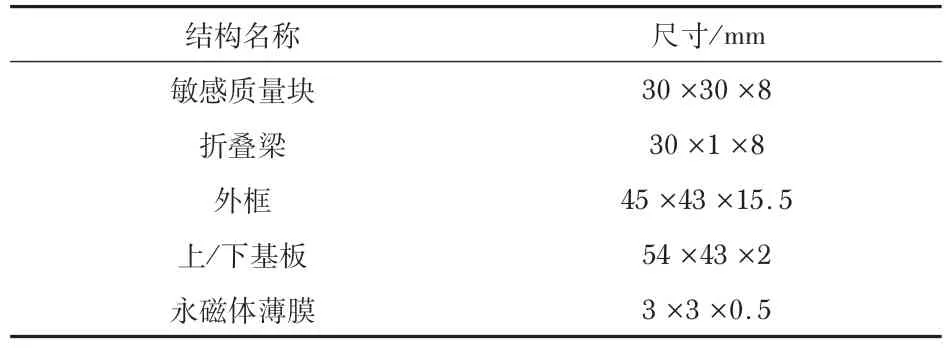
表1 加速度计结构参数
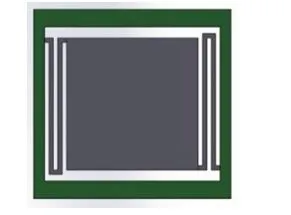
图4 主体结构设计
2.2 机械结构仿真
利用仿真软件Ansys 来优化加速度计结构的各阶模态响应,仿真得到加速度计敏感结构的各阶模态响应如图5所示。一阶模态表现为水平方向的运动,模态频率为45.86Hz。
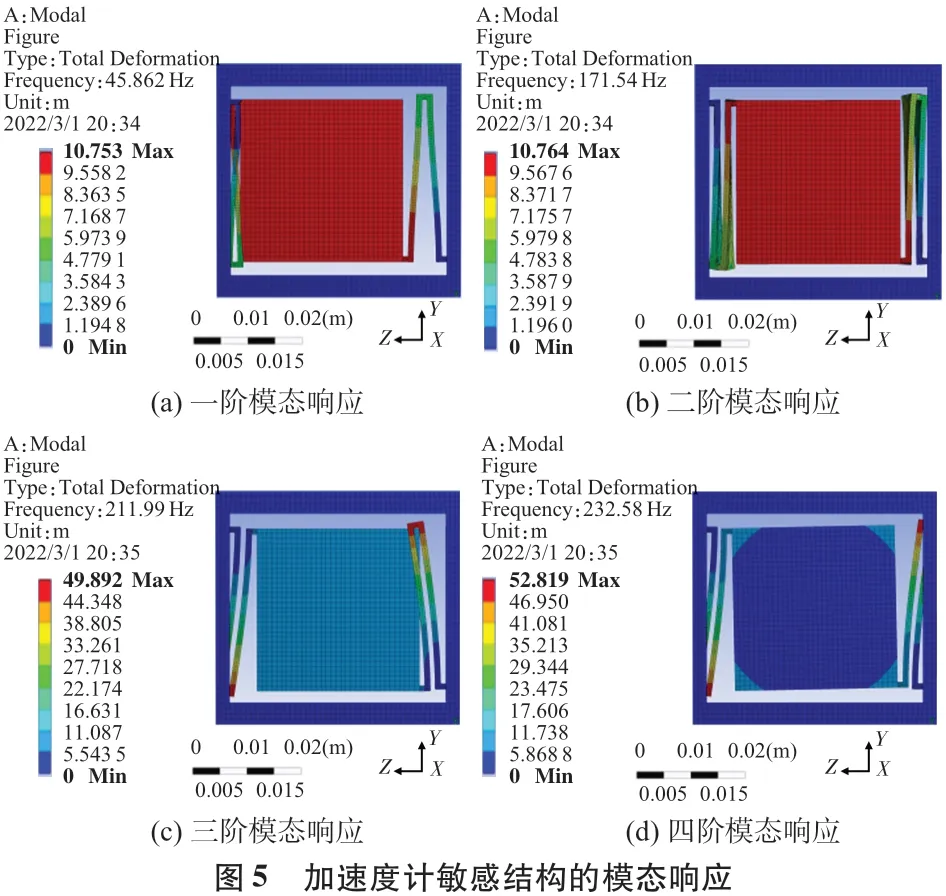
图5 加速度计敏感结构的模态响应
此外,对所设计的结构进行静态加速度响应仿真,输入加速度与质量块产生的位移结果如图6 所示,仿真结果表明位移响应与输入加速度大小呈线性关系。当在水平方向施加1gn大小的加速度时,仿真结果如图7 所示,在水平方向质量块产生的位移为120.84 μm。
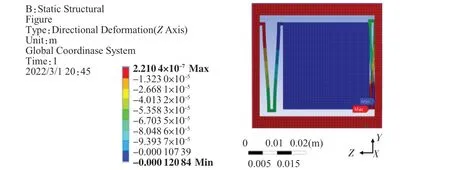
图7 水平方向施加1 gn 加速度时敏感结构的静态响应
2.3 磁场仿真
用Comsol软件对本次设计采用的永磁体薄膜进行磁场仿真分析如图8 所示,取永磁体薄膜与TMR传感器间的间隙z分别取4,6,8,10 mm 时,y方向磁场强度大小如图8(a)所示,间隙z=6 mm 时y方向磁场强度变化率与y轴位置关系如图8(b)所示,仿真分析结果与理论分析结果基本一致。
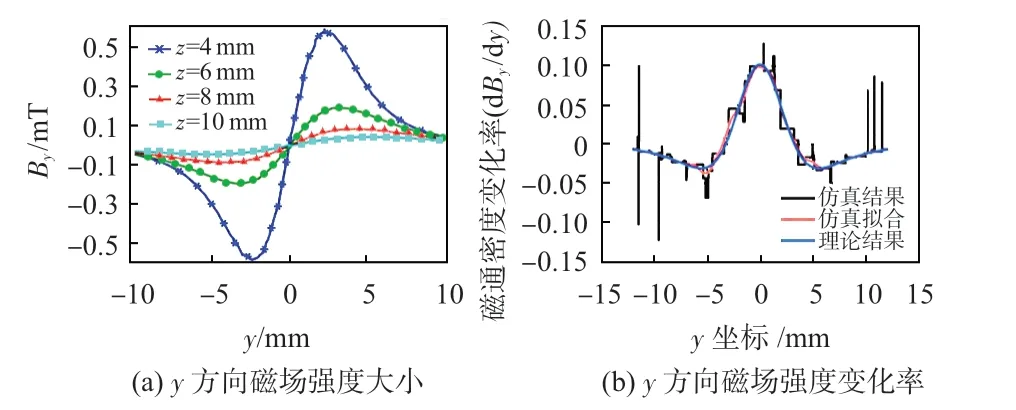
图8 不同y值下的y方向磁场强度大小和变化率
由图8可以看出,在磁场强度曲线关于原点对称,永磁体薄膜边缘两侧的磁场强度最大。磁场强度变化率曲线关于y=0两侧对称,在y=0 mm处磁场变化率最大,因此,在微组装时应尽量保证TMR传感器靠近y=0 mm处。
3 电路设计
图9为TMR加速度计的信号检测电路原理图,敏感质量块由于外界输入的加速度产生水平方向的位移,与此同时,质量块上方的敏感质量块也产生相同的位移,引起固定在上基板的2 只TMR传感器检测的磁场强度的变化,从而使TMR1和TMR2输出两路差分电压信号。两路差分电压信号经过两级差分放大电路和低通滤波电路后输出,经过电路调理后的电压信号不仅获得足够的增益,并很好地消除了共模误差和中高频干扰信号。
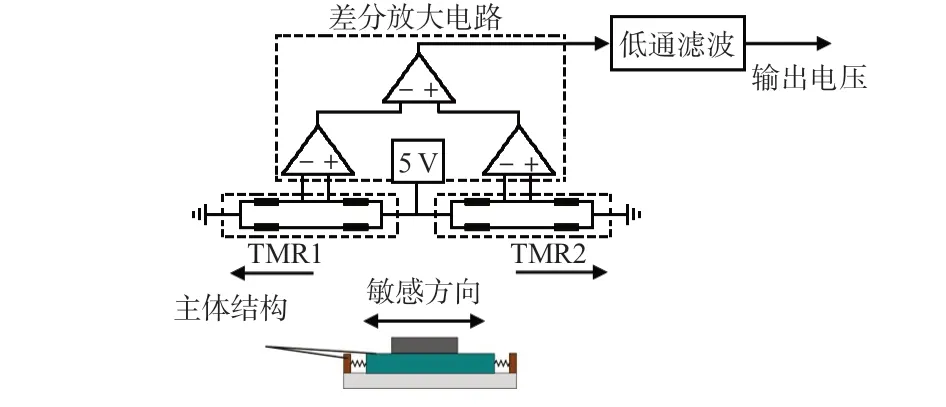
图9 整体电路原理
4 实验结果与结论
利用3D打印技术进行主体结构的加工,并将主体结构、永磁性薄膜、检测模块进行微组装,获得基于TMR效应的加速度计样机,如图10(a)所示。将样机封装至双层金属屏蔽盒中进行外界磁场屏蔽,通过直流稳压电源、万用表、角度仪搭建实验环境,如图10(c)所示。
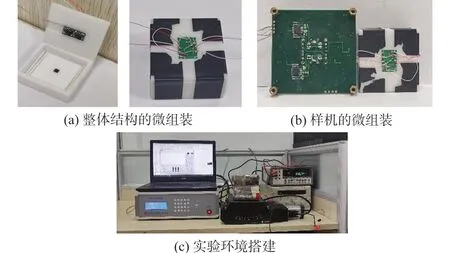
图10 TMR加速度计样机
利用直流稳压电源分别进行2~5 V 供电,输入-1,0,+1gn输入,得到2只传感器输出电压的标度因数与输入电压的关系如图11(a)所示,随着输入电压增大,传感器平均标度因数逐渐增大。
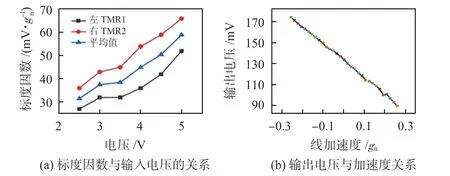
图11 输出实验结果
用电机驱动的角度仪进行精细的加速度输入,测控电路的输出电压与输入加速度的关系如图11(b)所示。从实验结果得到,加速度在-15° ~+15°变化的过程中,电压差值逐渐减小,标度因数为161.1 mV/gn。
5 结束语
本文主要研究了一种基于TMR效应的加速度计,通过理论分析建立了加速度-位移-磁场-电压模型,确定了整体设计架构,进行了结构设计,并利用有限元仿真对结构参数和磁场布局参数进行了优化,同时设计了测控信号处理电路。最后通过3D 打印技术和微组装工艺得到一个基于TMR效应的加速度计样机。实验结果验证该加速度计输入加速度和输出电压的关系,同时在6 mm 间隙时,所设计的加速度计标度因数为161.1 mV/gn。
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
中国特种设备安全(2021年5期)2021-11-06
商品与质量(2019年47期)2019-06-18
农业科技与装备(2017年4期)2017-08-17
中国惯性技术学报(2017年1期)2017-06-09
科技资讯(2017年3期)2017-03-25
中学生数理化·高二版(2016年12期)2017-02-28
光学精密工程(2016年5期)2016-11-07
Coco薇(2016年1期)2016-01-11
