
变电站无人机巡检图像边缘识别方法设计
2023-11-14 08:09:42吴水锋周云雅李海燕
机械设计与制造工程 2023年10期
李 游,吴水锋,周云雅,李海燕
(1.国网湖南省电力有限公司检修公司,湖南 长沙 410004)(2.变电智能运检国网湖南省电力有限公司实验室,湖南 长沙 410004)(3.国网湖南省电力有限公司,湖南 长沙 410004)
变电站的安全、稳定运行是保证电力系统正常运行的基础[1],对变电站进行巡检是保证其安全、稳定运行的关键之一。对变电站运行状况进行实时监测,可以及时发现变电站运行的缺陷,及时作出预警,避免发生安全事故[2]。
目前,大多采用无人机巡检的方式采集变电站的目标图像。然而无人机巡检过程中采集的图像都是动态状况下的图像,所包含的无效信息较多,后期难以对巡检图像中的故障信息进行准确识别[3]。边缘信息是图像最基本的特征,是图像中像素灰度存在明显变化的像素的集合。边缘信息存在于目标与背景、目标与目标、背景与背景之间,借助于边缘信息能够准确地捕捉到巡检图像中的目标信息和异常信息。因此,需针对变电站无人机巡检图像边缘识别方法进行设计,以实现对巡检目标图像的准确识别,及时排除安全隐患。吴一全等[4]提出了一种基于卷积网络的图像边缘检测方法,用来解决计算机视觉难以精准定位图像边缘的问题。首先利用卷积网络提取目标图像边缘点的特征,并对提取的特征进行集中训练,根据特征不变性原理分析目标图像边缘特征之间的关联,然后再根据卷积网络设定边缘判断条件,确定图像中的实际边缘信息点。虽然该方法可以定位图像边缘信息,但是离散系数偏小,定位效果一般。余震等[5]提出了基于中智理论的图像边缘检测方法。首先,基于中智理论将目标图像转换为中智图像,通过对图像内各个特征重新定义,生成新的图像信息,并求出新的图像信息的梯度阈值,来判断图像边缘的具体像素点,从而实现对边缘图像的检测。本文针对变电站无人机巡检图像设计了一种新的边缘识别方法。
1 无人机巡检图像边缘识别方法
1.1 重构无人机巡检图像像素的灰度值
影响图像边缘信息的一个重要因素是图像灰度具有不连续性,从而使边缘信息存在阶跃边缘和线条边缘两种形式。为避免因图像灰度不连续而影响图像边缘识别效果,本文在检测与识别前先对无人机巡检图像像素的灰度值进行重构。
若变电站无人机采集的两幅巡检图像的灰度值大小相近,则可以将这两个动态巡检图像归属同一类[6]。设定动态巡检图像的局部相似度函数为Hij,用下式表示:
(1)
式中:Hs-ij为无人机巡检图像i与j之间的像素值相似度,Hg-ij为无人机巡检图像i与j在空间中的灰度值相似度。
像素值相似度Hs-ij表示为:
(2)
式中:pi、qi为巡检图像i中两个像素值的颜色通道值,pj、qj为巡检图像j中两个像素值的颜色通道值,λk为无人机巡检图像像素值相似度的影响因子[7]。
灰度值相似度Hg-ij表示为:
(3)
式中:xi为动态巡检图像在核心区域的像素灰度值,xj为巡检图像在核心区域采集的灰度值,λg为巡检图像像素值相似度的影响因素,δg-i为巡检图像在核心区域的密度函数。δg-i可定义为:
(4)
式中:Ni为无人机巡检图像i的相邻区域的像素点,NR为无人机巡检图像i的相邻区域的像素点数量。
对无人机巡检图像的灰度值进行重构,表示为:
(5)
式中:ηi为重构的巡检图像η中第i个图像的灰度值。
1.2 检测无人机巡检图像边缘
根据无人机巡检图像的空间特征,采用代数运算对巡检图像的边缘实施检测。假设无人机巡检图像的大小为M×N,利用下式描述巡检图像的像素值p(x,y):
p(x,y)=fR(x,y)h+fG(x,y)l+fB(x,y)k
(6)
式中:(x,y)为无人机动态巡检图像在M×N内的图像位置;fR(x,y)、fG(x,y)、fB(x,y)分别为无人机动态巡检图像中R、G、B的具体像素值,(h,l,k)为巡检图像空间特征的3个虚拟单位。对无人机巡检图像中的像素值p(x,y)进行归一化处理,计算出巡检图像i与j之间的格拉斯曼积PrPr0:
PrPr0=sum(q1×q2)
(7)
式中:将图像i与j展开成一维向量,分别记为q1和q2,sum(·)为求和函数。PrPr0内包括一个像素值S[PrPr0]和一个动态图像V[PrPr0]。归一化处理后,无人机巡检图像的灰度值r与初始灰度值r0的判别方差为(-1,0)。由此可知,两幅无人机巡检动态图像的相似度越高,判别方差的值越接近(-1,0)。r与r0之间相似度判别函数c(r,r0)为:
(8)
式中:S和V分别为无人机巡检图像中的清晰图像与失效图像。

(9)

(10)

(11)
式中:R(P)为无人机巡检图像非边缘点和弱边缘点的分割结果,gl为巡检图像非边缘点的有效分割信息,gh为巡检图像边缘点的有效分割信息。
通过上述步骤确定无人机巡检图像边缘点的阈值信息,实现对变电站无人机巡检图像边缘的有效检测。
1.3 设计无人机巡检图像边缘识别方法
在识别无人机巡检图像边缘信息时,引入无人机动态巡检图像的离散系数Cuv[10]:
Cuv=Δuv/Iuv
(12)
式中:Δuv、Iuv分别为无人机巡检图像边缘uv的标准方差和方差限制。式(12)可以对无人机巡检图像的连接强度βuv进行分析,即Cuv=βuv,得到无人机巡检图像的离散矩阵:
(13)
式中:n为巡检图像边缘识别的迭代次数,Fuv[n]、Uuv[n]分别为无人机巡检图像边缘的信息值和动态数值[11-12],θuv[n]为无人机巡检图像边缘的权值,α和β分别为无人机巡检图像边缘点的权值隶属度和连接系数,θ0为无人机巡检图像边缘的灰度值。当βuv≠0时,利用卷积网络获得无人机巡检图像的边缘信息,定义边缘矩阵T,对无人机巡检图像进行迭代处理[13],有如下表达式:
Tuv[n]=Fuv[n-1](1+βuv[n])+1
(14)
公式(14)反映了无人机巡检图像的空间信息和时间信息,将巡检图像平面内的离散质点定义为:
xc=∑(xrmr)/∑hr
yc=∑(yrmr)/∑hr
(15)
式中:hr为巡检图像坐标点(xr,mr)处的离散质点信息;(xc,yc)为巡检图像边缘离散质点的中心,其能够体现出无人机巡检图像边缘的形状特征[14]。
为了能够对无人机巡检图像边缘信息进行有效识别,需要对其进行归一化处理[15],过程如下:
Ic=xc/M
Jc=yc/N
(16)
式中:Ic为横向图像边缘信息,Jc为纵向图像边缘信息。式(16)能够对动态巡检图像进行噪声干扰处理,结合上述求得的无人机巡检图像灰度值,实现对变电站无人机巡检图像边缘信息的自适应识别,表达式为:
δ=ic0+jc0+(Tij[n]·θ0)
(17)
式中:δ为变电站无人机巡检图像边缘信息的自适应识别结果。
2 实验分析
为验证上述设计的变电站无人机巡检图像边缘识别方法的实际应用性能,设计如下实验。
2.1 实验参数
实验过程中,为了排除噪声因素对变电站无人机巡检图像质量的影响,设置了如表1所示的实验参数。
表1 实验参数设置情况统计表
2.2 设置实验指标
实验过程中,先引入离散系数衡量变电站无人机巡检图像边缘的识别效果,离散系数值越大说明巡检图像边缘的识别效果越好,反之则差。
接着利用优质系数衡量变电站无人机巡检图像边缘的识别性能,将优质系数Pl定义为:
(18)
式中:n0为理想状态下识别到的点数,nd为正常状态下识别到的点数,∂为比例系数,dγ为识别到边缘点γ与理想边缘点之间的距离。
2.3 结果分析
为了突出本文方法的优势,引入基于Franklin矩的图像边缘识别方法和基于中智理论的图像边缘识别方法作对比。3种方法在图像边缘识别离散系数方面的测试结果如图1所示。

图1 图像边缘识别离散系数测试结果
由图可以看出,采用基于Franklin矩的图像边缘识别方法识别巡检图像边缘的离散系数为2~10,尽管随着识别次数的增加,其离散系数也越来越大,但离散系数的数值整体偏小于另外两种方法,识别效果不够理想;采用基于中智理论的图像边缘识别方法识别巡检图像边缘的离散系数比基于Franklin矩的方法大,但是当识别次数低于5次时,图像边缘识别的离散系数小于10,无法满足巡检图像边缘的识别要求;采用本文方法时,识别巡检图像边缘的离散系数为15~20,明显高于其他两种方法,由此可以说明,本文设计的变电站无人机巡检图像边缘识别方法的效果更好。
3种方法在图像边缘识别优质系数方面的测试结果如图2所示。
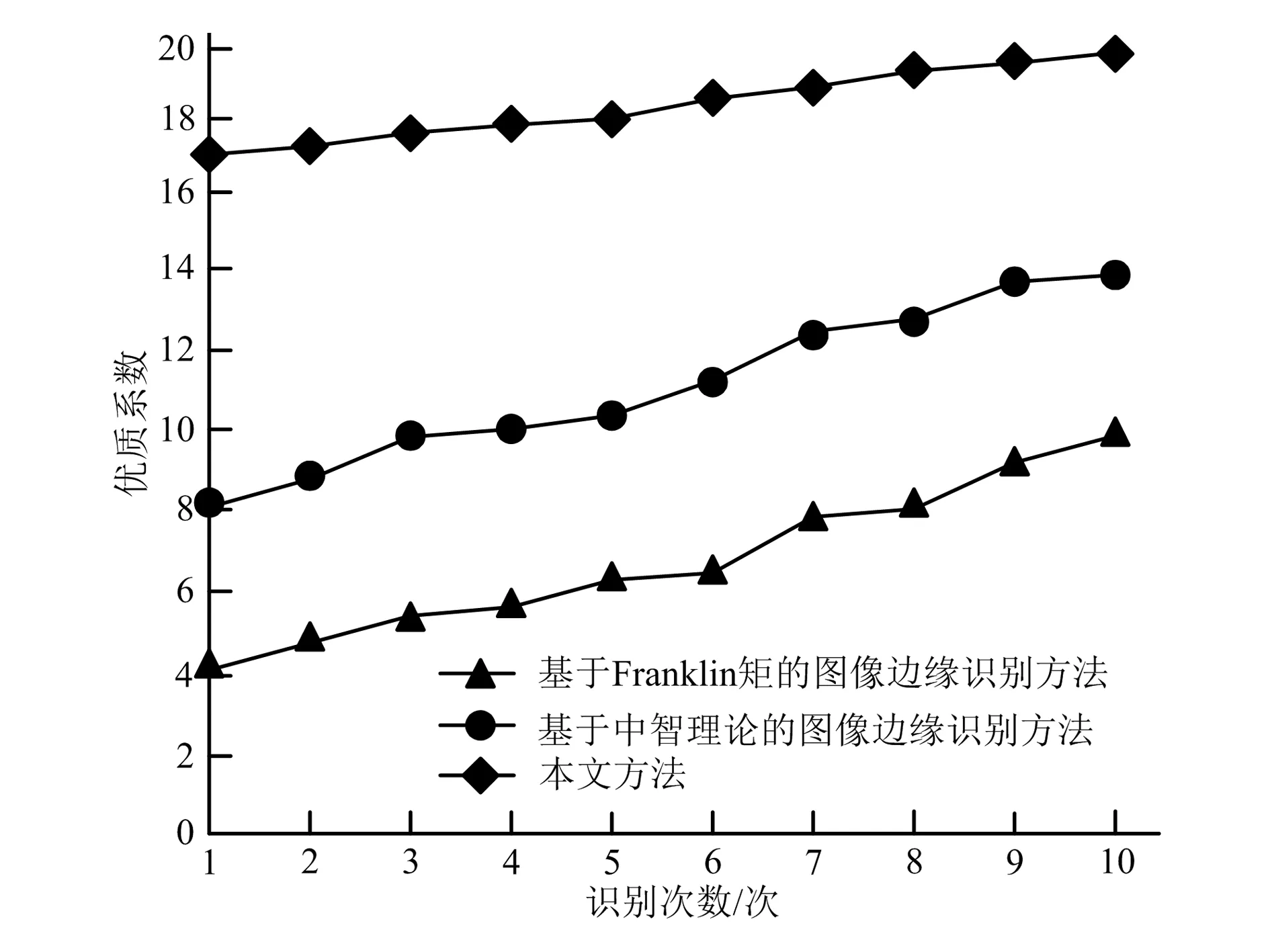
图2 图像边缘识别优质系数测试结果
由图可以看出,基于Franklin矩的图像边缘识别方法和基于中智理论的图像边缘识别方法的巡检图像边缘识别优质系数的变化趋势基本相同,基于中智理论的图像边缘识别方法得到的优质系数大于基于Franklin矩的图像边缘识别方法;采用本文方法识别巡检图像边缘的优质系数始终大于17,由此可以说明,本文设计的变电站无人机巡检图像边缘识别方法具有更高的性能。
3 结束语
本文设计了一种变电站无人机巡检图像边缘识别方法,经测试发现,该方法在识别变电站无人机巡检图像边缘时不仅具有更好的识别效果,还可以提高图像边缘识别性能。但是,由于实验时间等条件的限制,本文的研究还存在很多需要改进的地方。在今后的研究中,将考虑利用蚁群算法对图像边缘准确定位,以进一步确保图像边缘识别的准确性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
太原科技大学学报(2021年4期)2021-08-30 07:27:00
高技术通讯(2021年3期)2021-06-09 06:57:48
计算机工程与应用(2020年12期)2020-06-18 05:52:04
能源(2019年9期)2019-12-06 09:33:02
自动化学报(2017年5期)2017-05-14 06:20:56
通信产业报(2016年44期)2017-03-13 08:41:45
中国信息化(2016年4期)2016-12-28 09:16:04
光学精密工程(2016年1期)2016-11-07 09:01:59
雕塑(1999年2期)1999-06-28 05:01:42
