
基于主动转向和空气动力学协调控制的车辆稳定性研究
2023-11-06 13:20邓召文
兰州理工大学学报 2023年5期
高 伟, 余 伟, 邓召文, 易 强
(湖北汽车工业学院 汽车工程学院, 湖北 十堰 442002)
车辆动力学控制的主要目标是提高车辆的安全性、操纵性、机动性和舒适性.为了改善车辆动力学的诸多方面,如主动悬架、主动转向控制、直接横摆力矩控制、扭矩矢量控制等,车辆底盘控制系统被引入和开发[1-2].这些控制的本质都是从轮胎力学角度出发对车辆的纵向、横向和垂向动力学进行控制,从而达到改变车辆运动状态的目的.在低附着系数路面上轮胎会出现工作负荷过大易饱和的问题[3].
基于伯努利效应,尾翼可以为车辆提供较大的负升力(下压力),增大轮胎与地面间的附着力,使车辆产生更多的牵引力,增强纵向的动力性能,并提高加速能力.Corno等[4]建立了线性四分之一轿车动力学模型和尾翼模型,开发了H∞控制器,在不影响舒适性的情况下提高了车辆轮胎的抓地力.Kurec等[5]研究了主动空气动力学尾翼对赛车制动性能的影响,在制动时阻力系数增加至0.58,制动距离可以缩短31%.He等[6]采用滑模控制技术设计主动空气动力学控制器,在高速工况下对尾翼进行调整,结果表明,主动空气动力学控制改善了车辆的横向稳定性,且随着车辆前进速度的增加这种改善更为明显.Diba等[7]通过研究证明主动控制气动系统改善了小型赛车换道机动和潮湿路面行驶的操控性和安全性.Hammad等[8]在赛车的尾部安装断开式尾翼,基于线性二次型调节器控制左、右尾翼的攻角,保证车辆具有良好的操纵稳定性.
本文采用主动前轮转向与主动空气动力学(AAC)协调控制方法,提高车辆在极限工况的稳定性.车辆副襟翼采用断开式结构,左、右两侧副襟翼通过电机进行实时单独控制.该控制方法采用分层控制:上层控制器基于车辆二自由度模型来确定期望动力学响应,并建立基于规则的协调控制策略;下层控制器基于前馈-LQR反馈四轮转向(4WS)和基于滑模AAC协调控制策略,并通过CarSim/ Simulink联合仿真验证该控制方法的有效性.
1 赛车气动特性分析
通过Profile软件选用升阻比较大的Selig S1223翼型作为赛车副襟翼,GOE430作为主翼[9].其中,主翼攻角为5°固定不变,副襟翼为断开式可调结构.根据赛车行驶工况,可以控制左、右两侧副襟翼攻角,改变赛车气动特性,从而提高稳定性.加装空气动力学套件的赛车三维模型如图1所示.

图1 赛车三维模型
基于ANSYS/Fluent软件,应用计算流体动力学(CFD)分析主动可调尾翼赛车的气动特性.主翼攻角固定为5°,左、右两侧副襟翼初始攻角为0.其中,一侧攻角保持为0,另一侧攻角以10°为间隔旋转.分析单侧副襟翼0~90°转动时整车的气动特性,并对分析结果进行拟合得到升力系数-攻角曲线和阻力系数-攻角曲线,如图2所示.
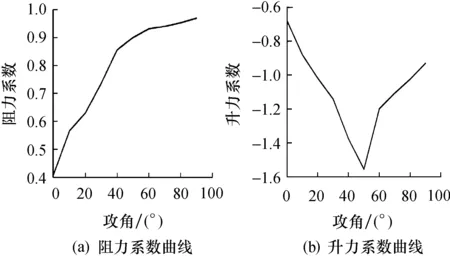
图2 气动特性曲线
不同攻角下赛车所受的阻力和升力分别为
式中:Fd为阻力;FL为升力;Cd、CL分别为阻力系数和升力系数;θ为尾翼攻角;A为车辆投影面积;ρ为空气密度;vx为车辆与气流的相对速度.
2 车辆系统模型
2.1 车辆模型
质心侧偏角和横摆角速度可反映车辆行驶稳定性,质心侧偏角反映车辆转向过程中期望轨迹的偏离程度,横摆角速度反映车辆的转向特性.为了实现车辆动态控制系统设计和操纵稳定性控制,需要建立车辆二自由度模型,如图3所示(CG为车辆质心,β为质心侧偏角,L为轴距),并做如下假设[10]:
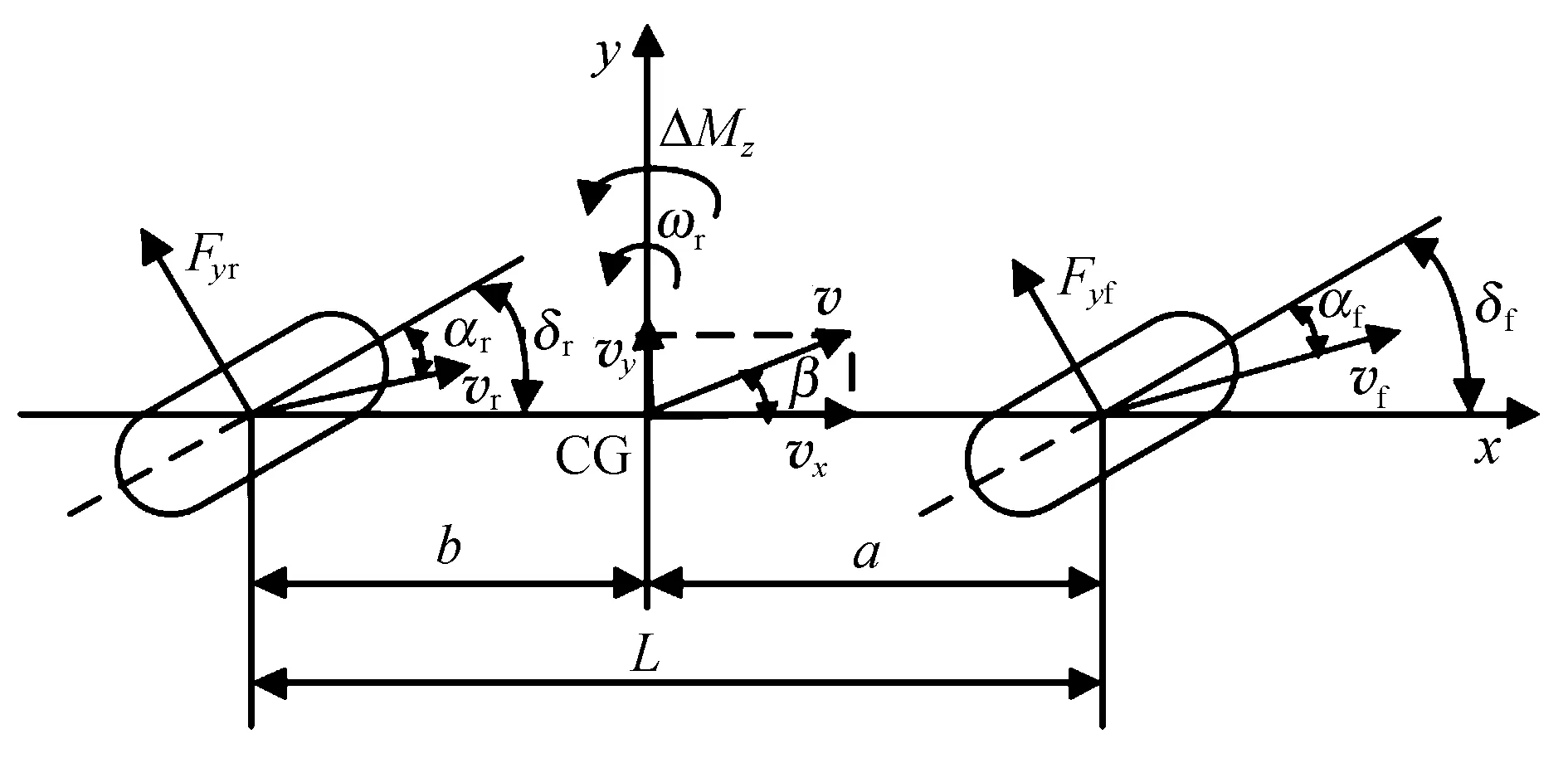
图3 车辆二自由度模型
1) 忽略垂直载荷变化对轮胎侧偏特性的影响;
2) 不考虑俯仰、横摆和垂直运动;
3) 左、右车轮转角和侧偏角相等.
根据牛顿第二定律和转矩平衡方程可得汽车二自由度微分方程为

2.2 轮胎模型
Magic Formula半经验模型计算量大且需要依靠大量实验数据.而刷子模型计算参数少,且能够反映路面摩擦因数、垂向载荷、纵向滑移率和侧偏角等对轮胎侧向力的影响[11].侧向力可以表示为
(5)
式中:Cαij和μ分别为每个轮胎侧偏刚度和路面附着系数;Fzij为各轮胎垂直载荷;α为前轮胎或后轮胎侧偏角;αsat为轮胎饱和侧偏角,即
(6)
2.3 轮胎侧偏特性
轮胎的转动方程为
Iωωij=Tdij-Tbij-FxijRω
(7)
式中:Iω为轮胎转动惯量;ωij为轮胎转速;Rω为轮胎转动半径;Tbij和Tdij分别为轮胎的驱动和制动力矩;Fxij为轮胎纵向力.
轮胎滚动速度是计算侧偏角和滑移率的重要参数,由车辆的纵向速度、横向速度、各轮转角和轮距等共同决定[12].
前轮纵向速度vfx、前轮侧向速度vfy、后轮纵向速度vrx、后轮侧向速度vry分别为
由图3中车辆模型的几何关系可得前、后轮的侧偏角分别近似为
3 控制系统设计
3.1 控制系统结构
基于分层控制思想设计的控制系统如图4所示,它主要包括车辆二自由度模型、基于规则的协调控制策略、主动后轮转向、主动空气动力学控制和被控对象.上层控制由二自由度模型和基于规则的控制策略组成,根据车辆信息进行判断,决策出协调控制指令并发送至底层控制器.底层各子控制器包括基于前馈-LQR反馈4WS、基于滑模控制(SMC)AAC和被控车辆.底层控制根据上层控制发出的指令,协调各子控制器参与控制过程,并将控制量发送至被控对象,实现人-车-路的闭环仿真过程.

图4 控制系统结构图
3.2 主动后轮转向控制器设计
高速转向时通过主动控制实现车辆后轮转向是4WS的显著优势, 有效改善了车辆的操纵稳定性[13].考虑到车辆行驶中外界的干扰,仅靠比例前馈控制车辆难以达到稳定.故本文采用比例前馈控制结合LQR反馈控制的后轮转向控制策略,使综合性能得到优化.采用的闭环控制系统如图5所示.

图5 主动转向控制策略图
后轮转角总控制表达式为
δr=δr1+δr2
(14)
式中:δr1为反馈转角;δr2为前馈转角.
在式(14)的基础上,考虑执行机构的动作滞后特性,建立1/(1+τs)表示执行机构的动作滞后.其中,τ为时间常数,s为虚数[14].
3.2.1LQR后轮转向控制器设计
基于对车辆后轮转角的控制,实现稳态时车辆质心侧偏角接近于零[15].以质心侧偏角和横摆角速度为优化对象.为寻求最优后轮转角输入δr,应使得性能指标J取极值最小,即
(15)
式中:Q、R为权重矩阵;X为输入量偏差矩阵;U为状态输出量矩阵.
系统的期望性能由矩阵Q和R决定[16-17].针对不同工况选取不同的权重系数,设计控制律为
U*(t)=-R-1BTλ(t)
(16)
令
λ(t)=P(t)X(t)
(17)
式中:B和λ(t)为系数矩阵;X(t)为矩阵X的状态量;P(t)满足矩阵黎卡提代数微分方程,即
PA+ATP-PBR-1BTP+Q=0
(18)
式中:A为系统的状态矩阵.则
U*(t)=-R-1BTP(t)X(t)
(19)
最终得到状态反馈的形式为
后轮转角为
(22)
3.2.2前轮前馈控制器设计
后轮转角与前轮转角的比值定义为k,k可保证车辆在稳态时质心侧偏角恒为零[18-19],即
(23)
3.3 主动空气动力学控制
车辆行驶过程中受到的气动力与车辆周围气流相对速度的平方值成正比.车速较低时,车辆受到的气动力较小,不足以达到干预车辆运动状态的程度.高速行驶时,可通过改变左、右侧副襟翼攻角使车辆产生较大气动力,从而在气动力的影响下车辆产生相应的横摆力矩,实现改善车辆操纵稳定性的目的.图6为主动空气动力学控制系统结构图.

图6 主动空气动力学控制系统结构图
3.3.1直接横摆力矩控制器设计
四轮转向车辆在转向过程中,通常驾驶员感受应与前轮转向车辆保持一致,即在同一前轮转角输入下期望获得与前轮转向车辆相同的横摆角速度响应[20].因此,四轮转向车辆的稳态横摆角速度可用在同样参数下前轮转向车辆的稳态横摆角速度代替,即四轮转向车辆的稳态横摆角速度为
(24)
式中:Gf为前轮转角δf到横摆角速度ωr响应的稳态横摆角速度增益;H为汽车稳定性因素.
考虑到路面附着条件的限制,并预留 15% 的路面附着裕量,理想横摆角速度为
(25)
式中:μ为路面附着系数;g为重力加速度.
采用滑模控制器对汽车横摆角速度进行控制,定义横摆角速度误差为
e=ωr-ωrd
(26)
根据横摆角速度跟踪误差,构建滑模面为
s=φe
(27)
为消减系统抖动,设计趋近律为
(28)
式中:φ为正值加权系数;η为趋近律.
为了验证控制系统闭环稳定性,定义李雅普诺夫函数为
V=s2/2
(29)
式( 22) 求导,并结合式( 20) 和式( 21) 可得:
(30)
式中:γ为滑模面常数.

因此,可求得最终附加横摆力矩为
(31)
3.3.2空气动力学力矩分配
产生期望附加横摆力矩Ma仅需控制单侧副襟翼的攻角,副襟翼控制状态切换逻辑如表 1 所列.
产生期望附加横摆力矩所需附加气动阻力为
ΔFd=|Ma|/la
(32)
式中:la为翼面中心到质心的距离.

表1 副襟翼控制策略
副襟翼攻角响应延迟由一阶滞后环节表示,即
(33)
3.4 基于规则的协调控制策略
因为低速时气动力对车辆影响较小,不足以干预车辆的运动状态,所以将80 km/h设为临界车速[21].高速时主动空气动力学与主动后轮转向联合控制,产生保证车辆稳定所需的附加横摆力矩,从而提高车辆的行驶稳定性.具体策略包括:低于临界车速时,两侧尾翼均不旋转,车辆稳定性通过主动后轮转向控制调节;高于临界车速时,主动空气动力学与主动后轮转向联合控制,产生保证车辆稳定所需的附加横摆力矩.协调控制策略如图7所示.

图7 协调控制策略
4 联合仿真
为了验证控制策略的有效性,基于Carsim/Simulink建立仿真模型,对比无控制(固定尾翼)、4WS控制和4WS+ACC协调控制的数值仿真结果.在低附着系数路面上选取双移线和漂移2种工况进行仿真实验.车辆建模主要参数如表2所列.

表2 车辆参数
为避免某个轮胎承受载荷过大而失效,以每个轮胎所受的最大切向力和轮胎垂直载荷与路面附着系数的乘积作为轮胎利用率[22].切向力越小,轮胎利用率越小;轮胎的负荷越小,对轮胎的磨损就越小.因此,采用轮胎利用率评估主动可调尾翼对轮胎工作状态的改善程度.定义轮胎利用率ε为[23]
(34)
式中:Fxij为轮胎纵向力.
4.1 双移线工况
根据 ISO 3888-2: 2002进行双移线实验,设纵向速度为120 km/h,路面附着系数为0.4.双移线方向盘转角如图8所示,稳定性响应曲线峰值如表3所列,仿真结果如图9所示.

表3 双移线工况稳定性响应曲线峰值

图8 双移线工况方向盘转角

图9 双移线工况响应曲线
由图9a可以看出,在相同工况下,从无控制、4WS控制到4WS+AAC协调控制,车辆ωr峰值绝对值逐渐降低,其值分别为10.03、9.84和8.74 rad/s,ωr峰值绝对值最大降低率为14.3%.由图9b可以看出:4WS控制和4WS+ACC协调控制车辆的质心侧偏角变化趋势与无控制相反,这主要是由于主动转向控制策略通过对车辆后轴施加合适的轮胎转角提高了车辆横向稳定性;在相同工况下,从无控制、4WS控制到4WS+ACC协调控制,车辆β峰值绝对值逐渐降低,其值分别为0.8°、0.72°和0.48°,β峰值绝对值最大降低率为40%.由图9c可以看出:在相同工况下,从无控制、4WS控制到4WS+AAC协调控制,车辆Ay峰值绝对值逐渐降低,其值分别为5.5、5.11和4.65m/s2,Ay峰值绝对值最大降低率为15.5%.结合图9d~g和表3轮胎利用率峰值可以看出,在相同工况下,从无控制、4WS控制到4WS+AAC协调控制,车辆轮胎利用率逐渐降低,较好地体现了协调控制的优越性.
4.2 漂移工况
设纵向车速为120 km/h,路面附着系数为0.85.
漂移工况方向盘转角如图10所示,稳定性响应曲线峰值如表4所列,仿真结果如图11所示.

表4 稳定性响应曲线峰值

图10 漂移工况方向盘转角
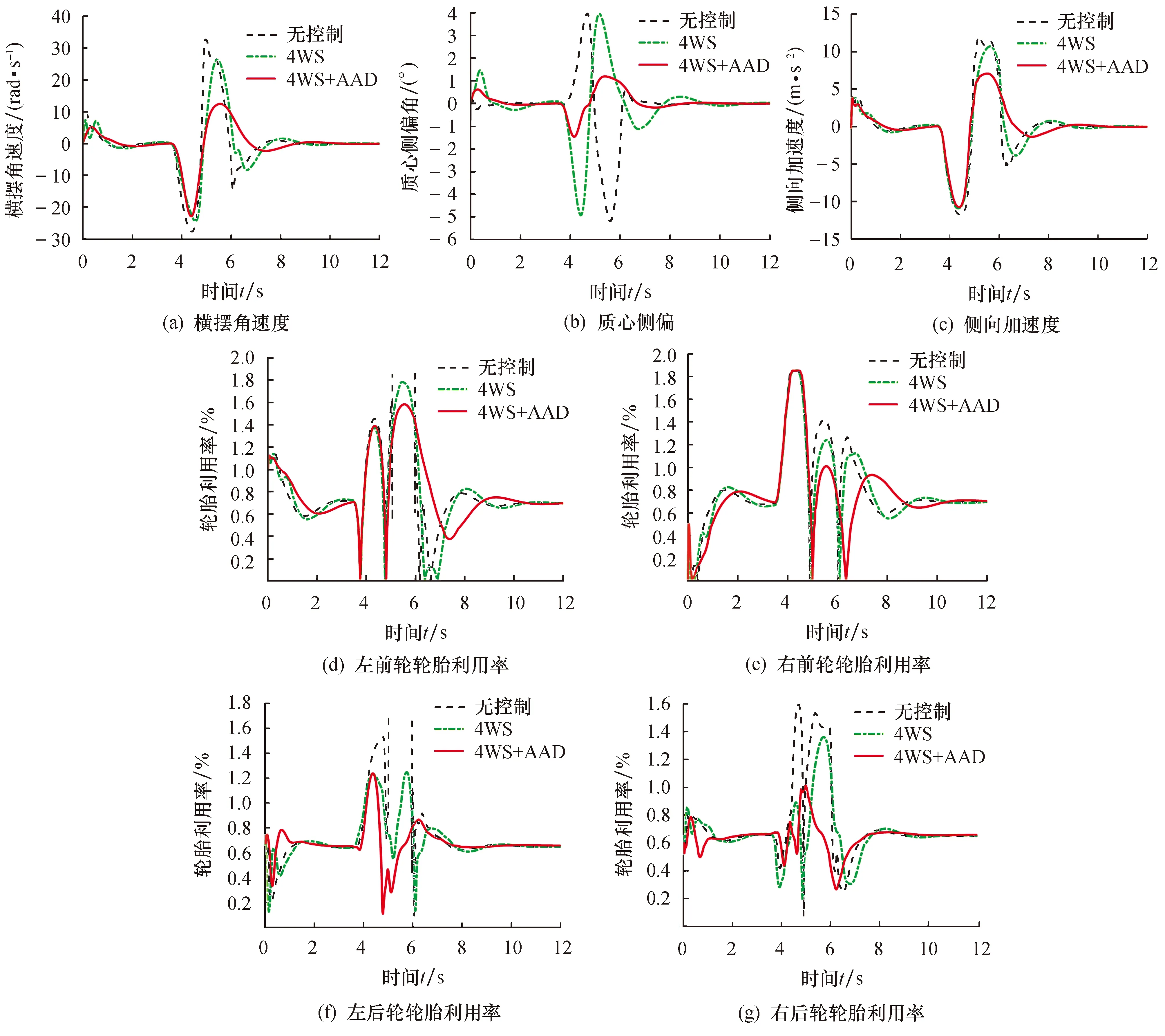
图11 漂移工况响应曲线
由图11a可以看出,从无控制、4WS控制到4WS+AAC协调控制,车辆ωr峰值绝对值逐渐降低,其值分别为32.77、26.33和22.82 rad/s,ωr峰值绝对值最大降低率为30.4%.由图11b可以看出:4WS控制和4WS+ACC协调控制的车辆质心侧偏角变化趋势与无控制相反,这同样是由于主动转向控制策略通过对车辆后轴施加合适的轮胎转角提高了车辆横向稳定性;在相同工况下,从无控制、4WS控制到4WS+AAC协调控制,车辆β峰值绝对值逐渐降低,其值分别为5.19°、4.92°和1.45°,β峰值绝对值最大降低率为72.1%.由图11c可以看出,从无控制、4WS控制到4WS+AAC协调控制,车辆Ay峰值绝对值逐渐降低,其值分别为12.1、10.91和10.76 m/s2,Ay峰值绝对值最大降低率为11.1%.由图11d和图11f可以看出,在5~6 s时车辆左侧车轮离地,垂直载荷为0,轮胎利用率趋于无穷大.由表4轮胎利用率峰值可以看出,在相同工况下车辆从无控制、4WS控制到4WS+AAC协调控制,轮胎利用率峰值除右前轮保持不变外都逐渐降低,并且在5 s以后右前轮轮胎利用率峰值也出现逐渐降低的趋势,减小了轮胎负荷,较好地体现了协调控制的优越性,显著改善了车辆稳定性.
5 结论
1) 基于CFD技术对不同尾翼攻角的车辆进行气动特性分析,通过数值分析方法对参数进行拟合,得到阻力系数-攻角曲线和升力系数-攻角曲线.
2) 基于LQR控制设计了前馈加反馈的主动后轮转向控制策略,同时设计了主动可调尾翼控制方法,通过主动空气动力学控制和主动后轮转向的协调控制提高了车辆稳定性.
3) 通过Carsim/Simulink联合仿真发现,主动后轮转向加主动尾翼协调控制的车辆具有更好的稳定性,降低了轮胎的利用率,减小了轮胎负荷.同时,验证了基于前馈-LQR反馈的主动后轮转向(4WS)和基于SMC的主动空气动力学(AAC)协调控制策略的有效性和优越性.
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
宇航总体技术(2019年5期)2019-10-11
小学生学习指导·爆笑校园(2019年6期)2019-09-10
北京航空航天大学学报(2017年7期)2017-11-24
自动化学报(2017年4期)2017-06-15
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
振动与冲击(2015年2期)2015-05-16
空气动力学学报(2015年3期)2015-04-14
电网与清洁能源(2015年2期)2015-02-28
