
民用飞机攻角传感器安装定位研究
2015-04-14 08:42:40赵克良
空气动力学学报 2015年3期
赵克良,周 峰,张 淼
(1.南京航空航天大学,江苏南京 210016;2.上海飞机设计研究院,上海 201210)
民用飞机攻角传感器安装定位研究
赵克良1,2,周 峰2,*,张 淼2
(1.南京航空航天大学,江苏南京 210016;2.上海飞机设计研究院,上海 201210)
对民用飞机风标式攻角传感器安装定位进行了研究。根据相关条例中攻角传感器安装使用的要求,提出了侧滑敏感性分析方法和攻角校线分析方法。利用数值模拟方法对传统机头和“流线型机头+翼身组合体”构型进行气动计算,通过侧滑敏感性分析方法和攻角校线分析方法,对攻角传感器的安装位置规律进行分析,最终在两种机头外形上得到相同的攻角传感器安装定位规律——轴向48%~100%机头最大宽度线上为攻角传感器的最佳安装位置。将得到的规律应用至构型一的攻角传感器安装定位中,并通过风洞试验对安装位置处的侧滑敏感性以及攻角校线进行验证,结果表明侧滑敏感性和攻角校线试验结果与CFD计算结果完全一致,证明了本文提出的攻角传感器安装定位分析方法合理、可行,总结的规律正确,对机头外形类似飞机的攻角传感器安装定位具有一定的参考价值。
攻角传感器;CFD;侧滑敏感性;攻角校线;定位
0 引 言
攻角传感器是飞机重要的大气数据传感器之一,主要有两种,压差式攻角传感器和风标式攻角传感器。压差式攻角传感器目前在民用飞机上使用较少,但利用其测量原理的集成式大气数据传感器已在新研机型上得以应用,如加拿大庞巴迪航空C系列飞机、巴西航空E系列飞机以及空中客车公司研制的A380飞机。而大部分飞机仍然采用风标式攻角传感器,如波音公司的B737、B747、B787系列,以及空中客车公司的传统机型A320、A330、A340系列等。风标式攻角传感器主要由两部分组成:风标叶片和内部传感器,它的工作原理是:风标叶片通过适应当地流场获得当地攻角信息,再通过内部传感器传递给计算机,计算机利用装订在其内的攻角校线关系,将当地攻角转换成飞机的攻角。
早期飞机安装攻角传感器的主要目的是用于飞机的飞控系统,引导飞行员正确地操纵飞机飞行,同时也为飞机的火控系统、进场着落动力控制系统、雷达等提供飞机飞行攻角参数。随着现代民用飞机的发展,飞机飞行的安全性以及乘坐的舒适性要求逐渐提高,这就对飞机飞行攻角测量的精准度提出了更高的要求。现代民用飞机的攻角传感器不仅要为飞机飞行指示系统、飞行控制系统、航空电子系统等提供飞机攻角数据[1],更为重要地,还要为飞机失速保护系统或者高攻角保护系统提供准确、可靠、即时的飞机攻角数据。如果攻角传感器不能为失速保护系统或高攻角保护系统提供及时、准确的攻角信息,将可能使飞机由于失速而发生灾难性后果。由此可见攻角传感器所提供飞机攻角数据的准确性、可靠性将直接关系到飞机的飞行安全。而攻角传感器的探测精准度又与其安装位置息息相关,因此开展攻角传感器的安装位置的研究就显得尤为重要。
国外攻角传感器以及其他大气数据传感器的安装定位技术已相当成熟,波音公司、空客公司在此方面都有丰富并系统的经验积累。但作为一种关键技术,除少数有关传感器校准的文献外,很少有攻角传感器定位方面的研究资料公开发表。
国内在攻角传感器的安装定位方面研究较少,汤黄华[2]在1994年通过模型简化,对规则旋成体上压差式攻角传感器的安装定位进行了理论分析,得到压差式攻角传感器安装位置规律,即机身侧曲线上Cp= 0的点上。姚宗信等对嵌入式大气数据传感器的测量位置进行了研究[3]。其他相关论文主要针对压差式攻角传感器校准[4-9]、设计[10-13]、补偿[14]以及解算技术[15],缺乏对风标式攻角传感器安装定位的研究。
从国内外攻角传感器安装定位研究现状来看,国外成熟技术对我们封锁,国内还没有开展风标式攻角传感器安装定位方面的研究。因此对攻角传感器的安装定位技术进行研究显得尤为必要、紧迫。
本文利用CFD分析方法,对风标式攻角传感器的安装定位进行研究,提出侧滑敏感性和攻角校线分析方法,总结出攻角传感器安装的一般规律。
考虑到攻角传感器一般安装在机头部位,而不同类型的机头气动外形对应的攻角传感器安装规律可能各不相同。因此,为了获得更为普适的风标式攻角传感器的安装定位规律,本文将分别针对两种不同气动外形的机头,进行攻角传感器的安装定位规律研究。
以其中一个构型为例,进行攻角传感器的安装定位并进行风洞试验验证,以证明本文所提出分析方法的合理性、可行性,以及安装规律的正确性。
1 研究思路
本文针对风标式攻角传感器安装定位提出如下的研究思路,如图1所示。其中,安装使用要求的转换是是关键,计算数据处理技术是重点,是攻角传感器安装定位规律分析的前提。

图1 攻角传感器安装定位研究思路Fig.1 Angle of attack sensor orientation strategy
2 设计要求
航空工业标准HB6763-93《攻角和侧滑角系统的安装》[16]对攻角传感器的安装位置提出明确要求,具体可归纳为如下三个方面要求:
a)侧滑:攻角传感器安装在受侧滑角影响最小的位置上。在任何情况下,每5°侧滑角引起的指示攻角与无侧滑时指示攻角的偏差(统计值)应不超过该构型失速攻角的3.3%;
b)攻角:攻角传感器输出的局部攻角和飞机机身攻角之间应具有线性关系,即满足关系式 αbody= kαlocal+b,其中 αbody为机身攻角,αlocal为当地攻角,k为斜率,b为截距;同时传感器安装和校准应使传感器的工作范围能满足飞机局部气流的变化范围;
c)流场:传感器安装位置处局部流场稳定;传感器位置的选择应考虑到气动干扰对位置误差的影响,在条件允许时,应尽可能将传感器安装于远离机翼的前方;同时传感器的安装应减小对飞机的气动干扰。
其中侧滑方面的要求为攻角传感器局部攻角随飞机侧滑角的敏感性要求,且为定量要求;攻角、流场方面的要求为定性要求。
3 要求转换
针对侧滑及攻角方面的要求,将其转化为气动计算、分析思路:
a)侧滑方面要求:对不同Ma数、攻角状态下,机头区域当地攻角随侧滑角的变化规律进行分析,即侧滑敏感性分析;
b)攻角方面要求:对机头区域当地攻角随飞机攻角的变化规律进行分析,即攻角校线分析。
通过侧滑敏感性分析和攻角校线分析,总结满足攻角传感器安装定位要求区域的分布规律。
4 气动计算、分析
4.1 计算
本文选取两种翼身组合体模型进行计算。这两种构型的机头外形具有明显的差异:第一种构型采用的是传统的机头外形,类似于A320、B737的机头外形,下文称为构型一;第二种构型采用流线型的机头外形,类似于B787的机头外形,下文称为构型二。
计算网格采用六面体结构网格,网格单元数为800万。采用ANSYS CFX5求解NS方程。两种模型及相应的计算网格如图2、图3所示:

图2 构型一翼身组合体模型及网格Fig.2 Configuration 1 wing-body model and mesh

图3 构型二翼身组合体模型及网格Fig.3 Configuration 2 wing-body model and mesh
4.2 数据采集
根据统计数据,攻角传感器风标叶片的高度一般在7 cm~9 cm[17-18]之间;在Ma=0.2~0.78时,计算得到的机头区域附面层厚度在4.5 cm以内,如图4所示。故能够反映风标叶片附近当地攻角数据的区域,主要集中在距离机头表面3 cm~9 cm的空间范围内。鉴于以上分析,本文中当地攻角数据均取自从机头、机身向外等距偏移5 cm的曲面上,本文将其定义为攻角数据采集面。
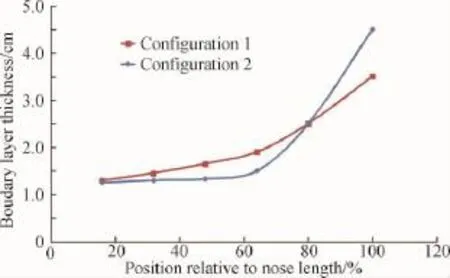
图4 机头区域附面层厚度示意图Fig.4 Boundary layer thickness
4.3 侧滑敏感性分析
取侧滑状态下对称面两侧数据采集面上相应点攻角之差,将左右攻角差量分布显示为云图形式,如图5、图6所示,图中给出了攻角差量在±2°、±4°以内(|Δα|≤2°、4°)的区域,具体侧滑敏感性分析如下。
4.3.1 构型一侧滑敏感性分析
图5为构型一机头区域攻角差量云图,由图可知:
a)|Δα|≤2°、4°的区域随着侧滑角的增大,逐渐向机头最大宽度附近靠拢;侧滑角越大该区域越小;
b)正负攻角差量基本对称分布在最大宽度线上下;
c)小侧滑条件下,马赫数、攻角的大小对|Δα|≤2°、4°区域的分布基本没有影响,如图5(a)、(c)、(e)、(g)所示;
d)Ma=0.2、α=12°、β=12°时,|Δα|≤2°、4°的区域最为狭小;此时左右机身相应位置的攻角差量对侧滑角大小的变化最为敏感。
4.3.2 构型二侧滑敏感性分析
图6为构型二机头区域攻角差量云图,由图可知:|Δα|≤2°区域的分布规律和构型一所呈现的分布规律一致:集中在机头最大宽度附近。
4.3.3 侧滑敏感性分析总结
通过以上分析,两种机头气动外形对应分布规律一致,结论如下:
a)侧滑角是影响左右攻角差量分布规律的主要因素;
b)马赫数、攻角对侧滑敏感性的影响较小;
c)|Δα|≤2°的区域集中在机头最大宽度附近,|Δα|≤0°的区域在机头最大宽度线上;
d)本文得到的侧滑敏感性分析结论普遍适用于类似飞机机头外形。
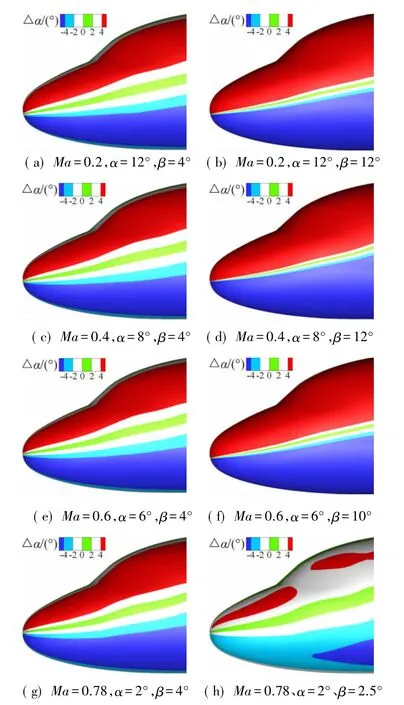
图5 构型一各状态左右攻角差量云图Fig.5 αlocaldispersion contour of configuration 1
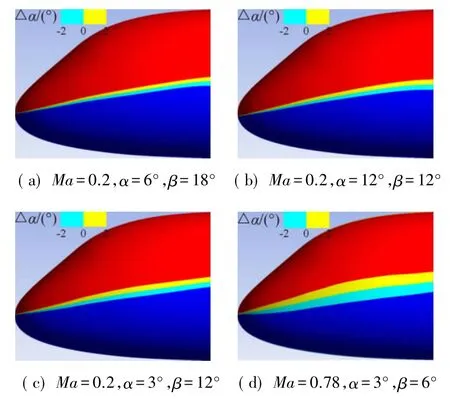
图6 构型二各状态左右攻角差量云图Fig.6 αlocaldispersion contour of configuration 2
4.4 攻角校线分析
根据侧滑敏感性分析结论,攻角传感器应该安装在机头最大宽度附近,因此本节主要针对最大宽度附近的区域进行攻角校线分析。
将机头沿轴向平均分成6等份,每一段后端剖面线与最大宽度线的交点定义为M1~M6,再以这6个点为中心,向上、向下平移该处机头直径的5%,得到上、下各6个点,分别定义为U1~U6、L1~L6,具体位置如图7所示。
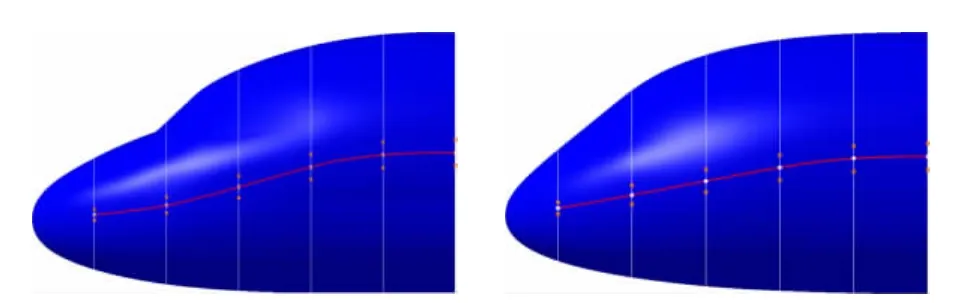
图7 攻角校线分析位置点示意图Fig.7 Positions for α calibrate analysis
对以上6组18个位置点进行攻角校线的分析,两种机头构型对应的攻角校线如图8、图9所示,由图可知:
a)由前向后,M1~M3点处攻角校线斜率变化较为明显,M3~M6点处攻角校线斜率基本一致。表明第三站位之前流场变化较为剧烈;第三站位之后流场变化较为缓和,具有很好的一致性。
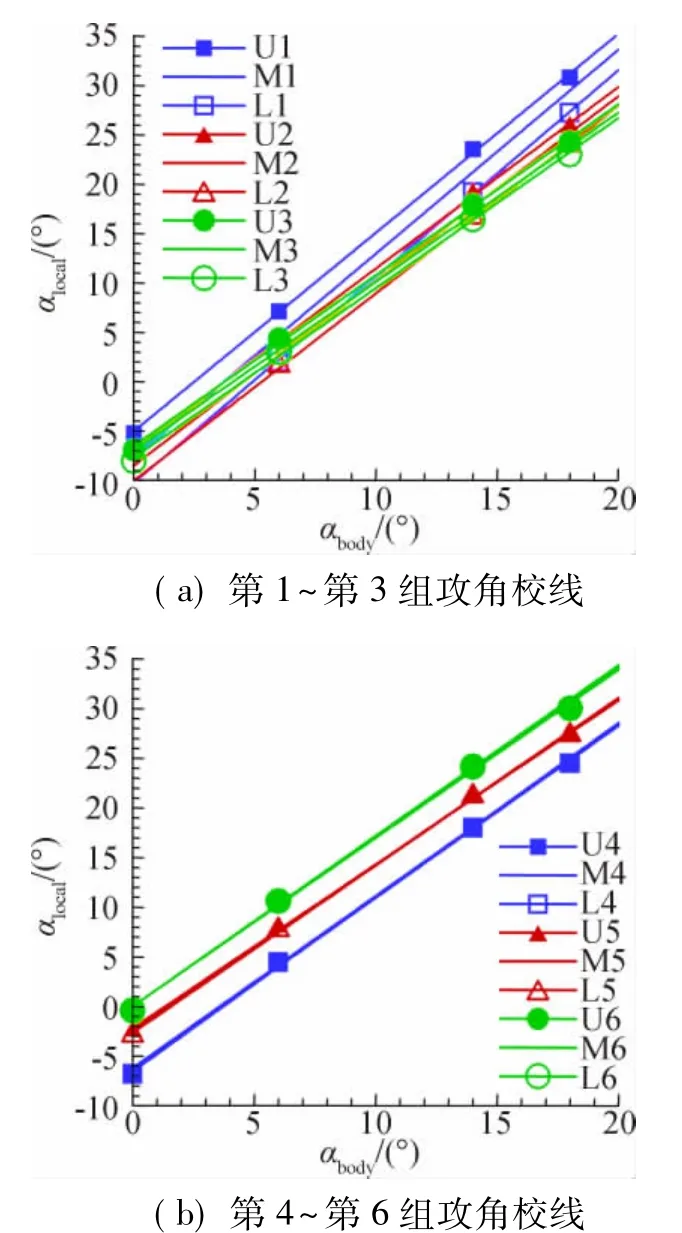
图8 构型一攻角校线Fig.8 α calibrate analysis for configuration 1
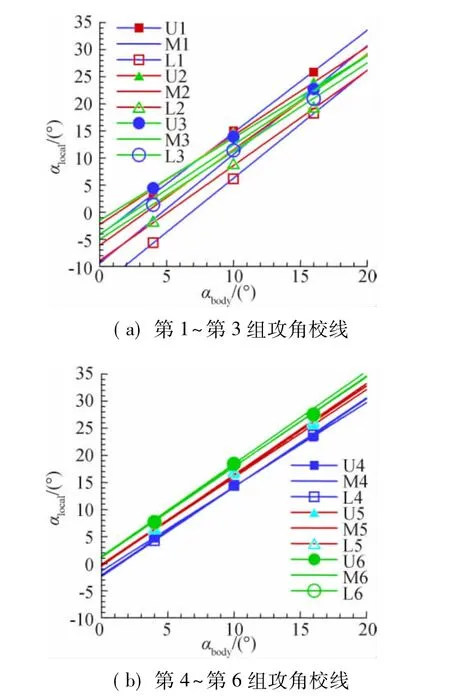
图9 构型2攻角校线Fig.9 α calibrate analysis for configuration 2
b)由前向后,每组三个位置点处攻角校线截距的差异逐渐减小;到第4组位置点时,三个位置点处的攻角校线基本重合,说明该剖面处由上至下流场具有很好的一致性;第5、第6组位置点处的攻角校线具有同样的特性,表明该区域范围内,流场无明显变化,当地攻角随机身攻角的变化规律具有高度一致性。
c)两种构型对应的攻角校线规律一致,表明机头气动外形的差异对机头区域攻角校线变化规律的影响较小。
以上对机头最大宽度线附近区域攻角校线规律的分析表明:从第3站位(即轴向站位48%)向后到等直段最大宽度线上是最为理想的攻角传感器安装区域。
5 规律应用及验证
本文以构型一为例,根据上文得到的攻角传感器安装定位规律,以及实际工程约束,进行攻角传感器安装定位,并对其进行风洞试验验证。
图10为构型一攻角传感器安装定位风洞试验模型示意图。由于受机头内部结构空间及其他条件约束,攻角传感器安装在最大宽度线以下130 mm(机头当地直径的4.7%)、轴向45%站位处。试验模型缩比为1∶10,试验攻角传感器为专门研制的高精度风标式攻角传感器,风标叶片高度为10 mm,外形与真实攻角传感器完全相似。在装机之前首先通过引导性试验进行标定,以确保传感器读数的准确性。
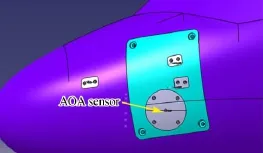
图10 构型一风洞试验模型Fig.10 Configuration 1 experiment model
构型一攻角传感器的侧滑敏感性以及攻角校线CFD及风洞试验结果如图11、图12所示。
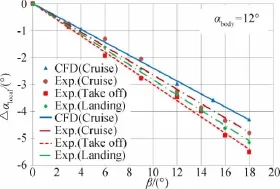
图11 侧滑敏感性试验及CFD计算结果对比Fig.11 Experiment and CFD data of sideslip sensitive analysis
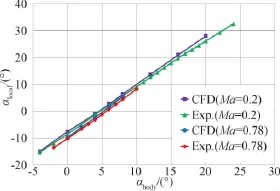
图12 攻角校线试验及CFD计算结果对比Fig.12 Experiment and CFD data of α calibrating analysis
由图11、图12可知,巡航构型时试验及CFD侧滑敏感性结果完全一致;起飞、着落构型下攻角校线吻合很好,校线斜率及截距差量分别小于 4%和1.67%。由此可见试验结果充分验证了本文得到的攻角传感器安装位置规律,且攻角数据采集面定义合理,能够正确反映当地攻角数据。
根据试验结果,此时风标安装位置处的攻角校线斜率为1.831,12°侧滑角时左右当地攻角差量为3.2°,则单侧攻角与机身攻角的差量为0.874°。根据航标要求,12°侧滑时此构型单侧攻角与机身攻角之差不超过0.96°,因此构型一攻角传感器的安装位置能够满足航标要求。
6 结 论
利用CFD工具对风标式攻角传感器的安装定位规律进行了研究,总结出满足航标要求的风标式攻角传感器安装位置的一般规律:
1)首先将相关条例中攻角传感器的安装使用要求转换为进行侧滑敏感性分析和攻角校线分析时安装位置应满足的要求,为后面的计算分析提供依据;
2)攻角数据采集面定义合理,能够正确反映当地攻角数据,方便侧滑敏感性及攻角校线分析;
3)通过侧滑敏感性分析和攻角校线分析,在两种不同机头外形上总结出相同的攻角传感器理想安装区域——轴向48%~100%机头最大宽度线上;该规律可推广至所有类似构型飞机的攻角传感器的安装定位中。
将安装规律应用至构型一攻角传感器的安装定位中,并用风洞试验对其进行验证,结果表明:CFD分析结果与试验结果高度一致,巡航构型时试验及CFD侧滑敏感性结果完全一致;起飞、着落构型下攻角校线吻合很好,校线斜率及截距差量分别小于4%和1.67%;且构型一攻角传感器安装位置满足航标要求。
本文提出的侧滑敏感性分析、攻角校线分析方法可为其他类型飞机攻角传感器的安装定位提供方法借鉴。
[1] Huang Fenghua,Wang Ling.Summary of the main control method of advanced control technology[C]//19thElectrical Theory Symposium,2007.(in Chinese)
黄凤华,王玲.先进控制技术的主要控制方法综述[C]//第十九届电工理论学术年会论文集,2007.
[2] Tang Huanghua.Installation and calibration of angle of attack[J].Hongdu Science and Technology,1994,(02):1-7.(in Chinese)汤黄华.攻角传感器的安装与校准[J].洪都科技,1994,(2): 1-7.
[3] Yao Zongxin,Liang Dakai,Li Ming.Optimizing design of measuring position of flush air data sensor installed on aircraft based on fuzzy logic[J].Acta Metrological Sinica,2004,25(3):257-261.(in Chinese)
姚宗信,梁大开,李明.基于模糊逻辑的嵌入式飞机大气数据传感器测量位置优化设计.计量学报[J],2004,25(3):257-261.
[4] Cai Guohua.Calibration test for positional error of null-seeking differential pressure transducer in low speed wind tunnel[J].Experiments and Measurements in Fluid Mechanics,1990,(4):75-81.(in Chinese)
蔡国华.归零压差式攻角传感器位置误差低速风洞校测试验[J].流体力学实验与测量,1990,(4):75-81.
[5] Cai Guohua.Calibration techniques for positional error of angle transducers with null-seeking differential pressure transducer in low speed wind tunnel[J].Aerospace Shanghai,1997,(5):31-35.(in Chinese)
蔡国华.归零压差式角度传感器位置误差低速风洞校测实验技术[J].上海航天,1997,(5):31-35.
[6] Meng Bo.Research on the measurement technology of air data in transonic and hypersonic flight[D].Nanjing University of Aeronautics and Astronautics,2011.(in Chinese)
孟博.跨音速/高超音速大气数据测量技术研究[D].南京航空航天大学,2011.
[7] Ou Lei.Assessment of the uncertainly of air data measurement[C]//2007 Metrology&Measurement Technology,2007.(in Chinese)
欧雷.大气数据测量不确定度评定[C]//2007年度中国航空学会计量技术专业委员会计量与质量专题学术交流会论文集,2007.
[8] Peng Zhizhuan,Wang Ding,Lu Bo,et al.Detection system of aero attack and sideslip angle sensor[J].Journal of Transducer Technology,2004,23(9):59-60.(in Chinese)
彭志专,王鼎,陆波,等.飞机攻角侧滑角传感器检测系统[J].传感器技术,2004,23(9):59-60.
[9] Qu Wenxuan.CID(GC-1)null-seeking differential pressure type angle of attack[J].Measurement& Control Technology,1980,(2):37-49.(in Chinese)
屈文选.CID(GC-1)型压差归零式迎角传感器[J].测控技术,1980,(2):37-49.
[10]Qian Moshu,Xiong Ke.Design of test system for air data of UAV[J].Journal of Guilin University of Electronic Technology,2006,26(2):97-99.(in Chinese)
钱默抒,熊克.无人机大气数据检测系统的设计[J].桂林电子科技大学学报,2006,26(2):97-99.
[11]Zhang Xiaoping,Song Zhenyu.Design of automatic test system for air data[J].Journal of Naval Aeronautical and Astronautical University,2008,23(3):66-68.(in Chinese)
张小平,宋振宇.大气数据自动测控系统设计[J].海军航空工程学院学报,2008,23(3):66-68.
[12]Du Yuxuan.The design and study of wind tunnel angle of attack system[D].Southwest Jiao Tong University,2012.(in Chinese)
杜雨轩.风洞攻角系统的设计与研究[D].西南交通大学,2012.
[13] Shao Xiaojie.Research of algorithm of the flush air data sensing (FADS)System[D].Nanjing University of Aeronautics and Astronautics,2005.(in Chinese)
邵笑杰.嵌入式飞行数据传感系统的算法研究[D].南京航空航天大学,2005.
[14]Meng Bo,Li Rongbing,Liu Jianye,et al.Research on compensation-correction of transonic angle-of-attack based on improved backpropagation algorithm[J].Systems Engineering and Electronics,2010,32(12):2681-2685.(in Chinese)
孟博,李荣冰,刘建业,等.基于改进反向传播算法的跨音速攻角补偿修正研究[J].系统工程与电子技术,2010,32(12): 2681-2685.
[15]Li Qichang,Liu Jinfan,Liu Xin,et al.The primary study of 3-point calculation method for the flush air data system.Acta Aerodynamica Sinica,2014,32(03):360-363.(in Chinese)
李其畅,刘劲帆,刘昕,等.嵌入式大气数据三点解算方法初步研究[J].空气动力学学报,2014,32(03):360-363.
[16]HB 6763-93.Installation of incidence and sideslip system[S].Aviation Industry Standard,1996.(in Chinese) HB 6763-93.攻角和侧滑角系统的安装[S].航空工业标准,1996.
[17]Goodrich Corporation Sensor Systems.Model 0861DV1 angle of attack sensor[Z].USA:Rosemount Aerospace Inc.,2005.
古德里奇公司传感器系统.0861DV1型攻角传感器[Z].美国:罗斯蒙特宇航公司,2005.
[18]Goodrich Corporation Sensor Systems.Model 0861CAL angle of attack sensor[Z].USA:Rosemount Aerospace Inc.,2005.
古德里奇公司传感器系统.0861CAL型攻角传感器[Z].美国:罗斯蒙特宇航公司,2002.
Angle of attack sensor orientation for civil aircraft
Zhao Keliang1,2,Zhou Feng2,*,Zhang Miao2
(1.Nanjing University of Aeronautics and Astronautics,Jiangsu Nanjing 210016,China; 2.Shanghai Aircraft Design and Research Institute,Shanghai 201210,China)
Angle of attack(AOA)sensor orientation for civil aircraft has been researched in this paper.According to the requirements of AOA sensor orientation in Chinese aviation industry standard HB regulations,the sideslip sensitive analysis method and AOA calibrating analysis method have been developed.Air flow fields have been calculated with the conventional nose configuration and streamline nose configuration by numerical simulation,and the sideslip sensitive analysis and AOA calibrating analysis have been used to obtain the most proper location to install the AOA sensor.An identical AOA sensor installing rule has been obtained with two different nose configurations i.e.the optimized position of AOA sensor is in the nose maximum half-breadth range of 48%-100%in stream-wise direction.The installing rule has been applied to the conventional nose configuration.Moreover,a validated wind tunnel test has been conducted.The test results of sideslip sensitivity and AOA calibration showed significant agreement with CFD results,which implying the analysis methods and relevant AOA sensor installing rule are applicable.Furthermore,the obtained method and rule have the potential to be utilized on any other aircrafts with similar nose configuration.
angle of attack sensor;CFD;sideslip sensitive;AOA calibrating;orientation
V271.1;V227+.9
A
10.7638/kqdlxxb-2013.0074
0258-1825(2015)03-0420-07
2013-07-11;
2013-10-30
赵克良(1965-),男,江西分宜人,研究员,在读博士,研究方向:飞机总体设计与结冰设计.E-mail:zhaokeliang@comac.cc
周峰*(1983-)男,江苏泰州人,工程师,硕士研究生,主要从事飞机气动设计和结冰研究.E-mail:zhonfeng@comac.cc
赵克良,周峰,张淼.民用飞机攻角传感器安装定位研究[J].空气动力学学报,2015,33(3):420-426.
10.7638/kqdlxxb-2013.0074 Zhao K L,Zhou F,Zhang M.Angle of attack sensor orientation for civil aircraft[J].Acta Aerodynamica Sinica,2015,33(3):420-426.
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:52
现代仪器与医疗(2021年5期)2021-12-02 02:11:28
宇航总体技术(2019年5期)2019-10-11 07:32:56
科教导刊·电子版(2017年35期)2018-01-27 09:24:38
火力与指挥控制(2017年11期)2017-12-19 05:08:41
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
中学生理科应试(2016年5期)2016-10-21 15:52:50
中国塑料(2015年6期)2015-11-13 03:03:14
振动与冲击(2015年2期)2015-05-16 05:37:34
四川党的建设(2014年9期)2014-08-23 01:33:22
