
孤岛光伏微电网不平衡电压分层控制方法
2023-10-05 08:10李玮代少君王东旭
电子设计工程 2023年19期
李玮,代少君,王东旭
(国网武汉供电公司,湖北武汉 430013)
微电网是一种根据一定的拓扑结构运行的电力系统,与传统的集中式电力网相比,其能够根据不同的地理位置、电力特性及时调整供电模式。依据不同用户需求,使用了一种适用于分布式电源的新型电力模式。微电网是一种重要的网络,其主要模式有并网和孤岛两种。在并网模式中,控制电网的总电压、频率,使电能共享变得简单;在孤岛模式下,通常采用下垂控制,以实现各换流器的容量比分布。通过调整电流变换器的电压幅度和频率,使其维持在额定的范围内。然而,逆变器和AC 母线之间存在着线路阻抗,使其运行点与下降曲线的标准点偏差很大,导致电源电压、频率偏差不变,对电压质量造成不良影响[1];使用二次控制方式来降低电压和频率的偏差,然而该方法所使用的分类算法受到大量分类数据影响,无法精准分配功率。另外,在二次控制方法中,结合集中控制模式,要求微电网中心控制器与故障接地的全部故障进行通信,这也增加了系统通信带宽。一旦集中控制中心出现通信中断问题,则整个系统将处于瘫痪状态[2]。为了进一步优化孤岛光伏微电网不平衡电压的控制效果,通过分层控制的方式控制有功和无功电压,实现孤岛光伏微电网不平衡电压分层控制研究。
1 不平衡电压双层控制方法
1.1 双层控制结构
孤岛光伏微电网不平衡电压双层控制结构如图1所示。

图1 双层控制结构
图1 中双层控制结构的设计是为了协调分布的发电机和电压质量,其相较于单层控制结构更加复杂,在控制过程中需要综合考量多个元件的电压分布情况。
在孤岛光伏微电网中,主控制器是最小的控制层,其可以通过上层的反馈有效地控制每个发电站的负荷[3]。同时,为了提高微电网的接入能力,实现对电力系统的网络控制,通过分层、分段的网络协作控制[4],实现了对孤岛微电网电压、频率的有效控制。
1.2 双层控制策略
针对孤岛条件下的微电网输出功率和负荷不均衡问题,采用不同的电压、频率,实现微电网的等级控制。
1.2.1 上层控制
上层负责制定操作方案,根据电压、电流、功率等信息及时调整操作方案,并调节微电网的电压、频率[5-7]。电力系统的有功功率与频率、无功功率和电压梯度成正比关系,该方法能调节电网的有功功率、无功功率,从而达到对电网电压振幅的控制[8]。
孤岛光伏微电网多个分布的发电机往往是并联的。从图2 中可以看出,多台分布式发电机通过连接线路并联至相同的负荷母线。
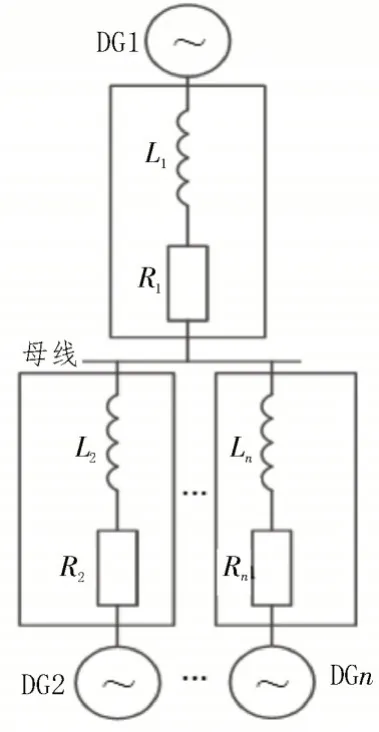
图2 分布式电源接入负载母线等效电路
由图2 可知,微电网的分布供电方式可以在同一时间将足够的电力输送到公用负荷母线上,以确保各逆变器的输出电压完全一致。各分布式电源的容量平衡分布方式有效地控制了各分布式电源的有功功率、无功功率[9-10],并在此基础上找出了一个平衡点,实现了系统的稳定工作。
1.2.2 下层控制
下层控制根据所发出的电能质量级别命令来设计相应的控制策略,具体的协同控制战略是:孤岛微电网的输出功率和负载需求不匹配,导致了电力系统的低容量运行[11]。由于该方案的功率消耗很小,仅有一台具有下垂控制的微型计算机,因此能够根据下垂控制的特性来增加或减少输出,从而保证了系统的能量平衡[12]。
通过对微电网的分级管理,可以把其所做的工作全部交给上级,降低了复杂度,使微电网标准化。此外,采用微电网级别控制后,该系统具有较大的灵活性,
可以方便地将分布式发电等控制功能引入到系统中。
2 不平衡分层补偿控制
为了实现孤岛光伏微电网电压不平衡补偿,避免对集中控制器的依赖,提出了双环比例积分的PI调节方法,有效保证了对补偿信号的精准跟踪[13]。
在非对称条件下,输出功率是由分层频率和输入功率决定的。在分层结构中,使用低通滤波器滤除冗余分量,获取对应的有功和无功功率分量。根据双层控制结构,结合下垂机制,修正各个单元正、负序分量,进而达到对每个单元功率平均分配的目的[14]。下垂机理由以下公式组成:
式中,ω1、ω0分别表示经过滤波器处理后生成的角频率和额定角频率;V2、V0分别表示经过滤波器处理后生成的电压和额定电压;α1、α2分别表示角频率和电压下垂系数;W1、W2分别表示有功功率和无功功率;、分别表示经过滤波器处理后生成有功功率和无功功率[15]。
虚拟阻抗可以在不损失功率的情况下,增加系统的阻尼,降低有功和无功功率的耦合。将电压矢量定向结果输入到坐标系dq中,该坐标系的d轴为虚拟阻抗控制,q轴为电压控制[16-19]。
虚拟阻抗控制可由式(2)表示:
负载变化下的电压下垂控制示意图如图3所示。
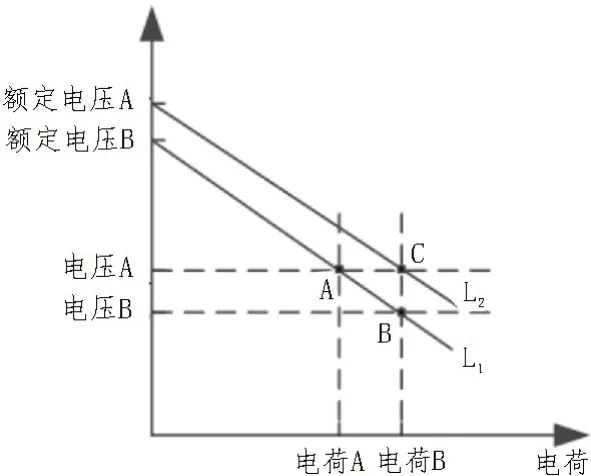
图3 电压下垂控制示意图
图3 中,当孤岛光伏微电网稳定运行时,正常工作点是A 点,下垂直线为L1;在电网中添加负载后,工作点变为了B 点,电压由A 降到了B,同时负载也发生了较大变化。此时,如果电压下降过大,将会对电网造成严重影响。当电压恢复到A 点时,采用双环比例积分的PI 调节策略,对电压不平衡度补偿。
构建的第一环电压参考值为:
构建的第二环电压参考值为:
由于基准电压包含正、负序两种信息,所以使用双环比例积分的PI 调节策略既能调节正、负序电压,又能防止序分量的分离。这种方法是通过采用各个分布式电源的轴负序成分量来补偿不平衡的,从而达到对各个分布式电源不平衡的补偿。
3 实验分析
3.1 孤岛光伏微电网拓扑结构
以孤岛光伏微电网为例,其典型的拓扑结构如图4 所示。
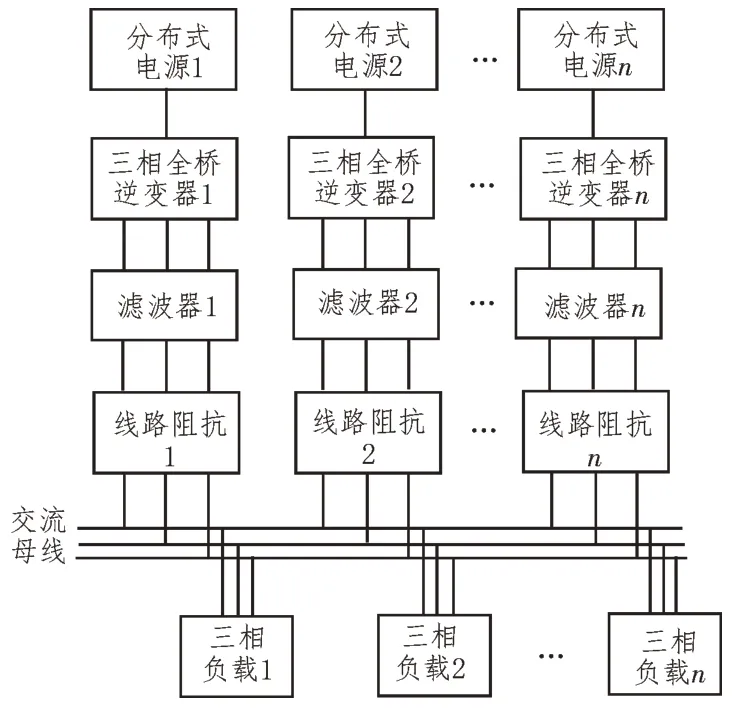
图4 孤岛光伏微电网拓扑结构
孤岛光伏微电网以光电板为主要电源,采用变换器、滤波方法,对电网的输出信号变换、滤波,使其满足用户要求,并在此基础上,采用预先设置的控制策略,实现了对母线电压和功率的控制。
3.2 实验过程
以图4 所示的拓扑结果为基础设计实验,具体实验步骤如下所示:
第一步:当t=0 s 时,系统启动,分布式电源1 至n开始供电,并逐渐进入稳定状态。
第二步:当t=4 s 时,系统在负载不平衡的情况下被引入,从而导致了系统的非平衡运行。
第三步:当t=6 s 时,在非均衡条件下,系统会出现非均衡操作。
第四步:当t=8 s 时,分布式电源n停止操作,分布式电源1 和2 继续供电。
根据上述步骤获取8 s 内电路负载吸收的有功和无功功率,如表1 所示。
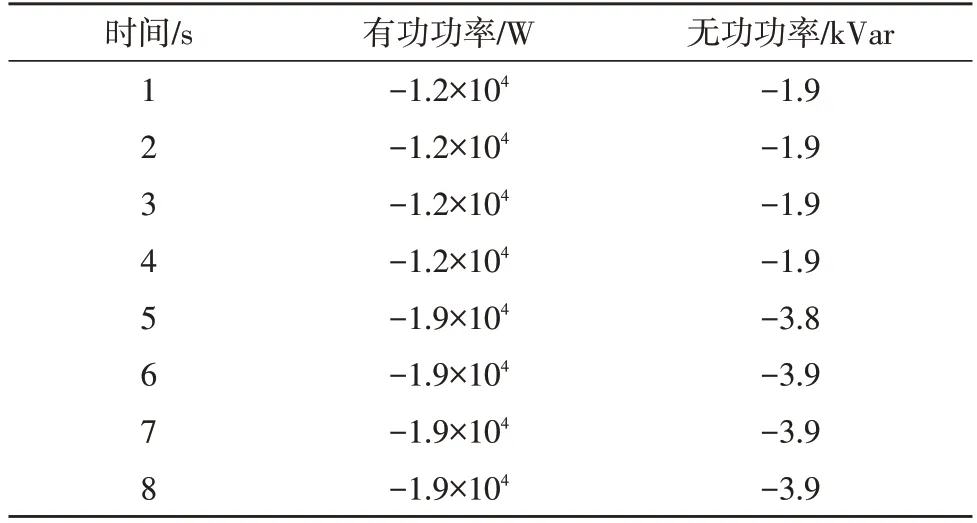
表1 电路负载有功和无功功率数据统计
由表1 可知,电路负载吸收的有功、无功功率从稳定状态突然降低,并保持不变。
3.3 实验结果与分析
分别使用下垂控制策略、二次控制策略和分层控制方法,对比分析电压不平衡度,如图5 所示。
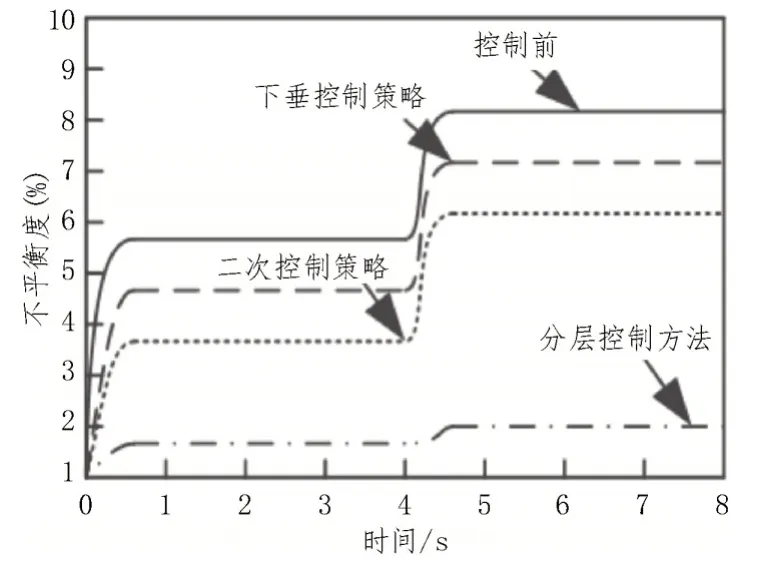
图5 不同方法电压不平衡度对比分析
由图5 可知,在实施控制方案前,电压不平衡度在0.5 s 前由0 上升到5.7%;在0.5~4 s 时间范围内,不平衡度保持5.7%不变;在4~4.5 s 时间范围内,不平衡度由5.7%上升到7.9%;在4.5~8 s 时间范围内,不平衡度保持7.9%不变。
针对电压不平衡度随着时间变化显著升高的趋势,使用下垂控制策略,电压不平衡度在0.5 s 前由0上升到4.8%;在0.5~4 s 时间范围内,不平衡度保持4.8%不变;在4~4.5 s 时间范围内,不平衡度由4.8%上升到7.2%;在4.5~8 s 时间范围内,不平衡度保持7.2%不变。使用该策略与控制前电压不平衡度相差不大,说明使用该策略控制效果不明显。使用二次控制策略,电压不平衡度在0.5 s 前由0 上升到3.8%;在0.5~4 s 时间范围内,不平衡度保持3.8%不变;在4~4.5 s 时间范围内,不平衡度由3.8%上升到6.1%;在4.5~8 s 时间范围内,不平衡度保持6.1%不变。因此,使用该策略的不平衡电压控制效果优于下垂控制策略。使用分层控制方法,电压不平衡度在0.5 s前由0 上升到1.8%;在0.5~4 s 时间范围内,不平衡度保持1.8%不变;在4~4.5 s 时间范围内,不平衡度由1.8%上升到2.1%;在4.5~8 s 时间范围内,不平衡度保持2.1%不变。因此,使用该策略的不平衡电压控制效果优于下垂控制策略、二次控制策略。
通过上述分析结果可知,使用分层控制方法,小负载接入电网后,电网达到稳定状态,经过短暂的负载变化后,电网又重新回到稳定状态。
4 结束语
文中在明确孤岛光伏微电网中因负荷不均衡所造成的电压不均衡问题的基础上,建立了双层控制结构,设计了分层控制结构,实现电压不平衡的分布式协同优化控制。为了进一步促进电力工业的安全、可靠和经济发展,针对孤岛微电网中的电压不平衡问题,利用分布式电源补偿控制。
在下一步研究中,深入探讨分布式电源与其他电能质量控制系统之间的交互和控制区域的耦合关系,并研究微电网分布式发电系统、储能系统和配电系统。
猜你喜欢
小猕猴智力画刊(2023年3期)2023-10-12
新世纪智能(语文备考)(2020年9期)2020-12-31
航天控制(2020年4期)2020-09-03
现代装饰(2019年11期)2019-12-20
铁道通信信号(2019年1期)2019-03-21
创新作文(小学版)(2017年33期)2017-04-04
舰船科学技术(2016年1期)2016-02-27
上海电机学院学报(2015年3期)2015-02-28
中国卫生(2014年7期)2014-11-10
石油化工自动化(2014年6期)2014-09-10
