
深耦合与空时频结合的多波束抗干扰处理方法
2023-10-05 08:10吴佳佳
电子设计工程 2023年19期
任 奇,万 祥,赵 璐,吴佳佳,李 源
(1.航天恒星科技有限公司,北京 100094;2.航空工业江西洪都航空工业集团有限责任公司,江西南昌 100088)
2020 年7 月31 日,北斗三号全球卫星导航系统正式开通,标志着我国北斗导航系统具备全球导航能力。从2022 年4 月中国卫星导航系统管理办公室测试评估研究中心发布的全球北斗卫星监测评估结果可以看出,全球任意地点可观测到的北斗导航卫星为6~16 颗,绝大部分地区在10 颗以上。由此可见,目前北斗导航系统已经完全可以满足各类高精度服务需求[1]。
导航信号采用扩频体制,虽然本身具备一定的抗干扰能力,但是扩频增益的抗干扰能力较弱,难以满足复杂电磁环境下的特种应用需求,必须借助其他的抗干扰手段。采用阵列信号处理技术,可在空域和时域对干扰进行调零处理,从而为导航接收机提供抗强干扰的能力[2]。
由于卫星导航信号属于宽带信号,整个带宽内各频点到达阵列天线各个阵元的空间波程差并不完全一致,同时射频通道也不是理想通道,存在通道频带不一致,天线也存在方向图不一致、互耦等影响,如果只采用空域自适应抗干扰算法,则抗干扰性能会严重下降[3],故一般采用空时自适应抗干扰算法或空频自适应抗干扰算法,以提高抗干扰性能。
1 抗干扰处理增益需求
以接收机捕获灵敏度为-135 dBm、跟踪灵敏度为-140 dBm 为例,接收处理对应的载噪比分别为37 dB-Hz(N0=-174 dBm/Hz,通道噪声系数约为2 dB)和32 dB-Hz,可见捕获处理需要具有更高的载噪比,因此捕获处理对抗干扰功能的要求更高[5]。
假设导航信号功率为-130 dBm,则未受到干扰的信号载噪比为42 dBm-Hz[6],满足信号捕获要求,当接收到一个100 dB 的宽带干扰时,抗干扰处理前的等效载噪比为-26.9 dB-Hz。可见,由于受到干扰的影响,抗干扰处理前的载噪比约为-26.9 dB-Hz,低于捕获门限。要保证卫星导航接收机的捕获功能正常,则经抗干扰处理后的等效载噪比需大于37 dB-Hz,则经抗干扰处理后的干信比需小于34.5 dB。
因此,要保证在干信比为85 dB 的六宽带干扰条件下卫星导航接收机能够正常工作,对于每个干扰其抗干扰处理增益均需要大于59.3 dB。
该文采用数字多波束空时频自适应处理结合紧耦合的方法提高接收机处理增益,从而提升接收机的抗干扰性能。
2 数字多波束空时频自适应处理方法
数字多波束技术可形成多个波束,每个波束针对某颗导航星的空间分布调整合成天线方向图,使方向图的最大增益对准导航星方向,从而在抑制干扰信号的同时,对有用信号进行了增强[7]。数字波束形成的工作原理是在阵列的输出端重构出某个方向的源信号,当多个信号源存在于空间中的不同位置时,这些信号被一包含天线阵列的平台接收,通过调整每个阵元上的权值,对信号空间里的每个信号源进行加权求和处理[8]。这些权值可以根据阵元采样数据,运用某种自适应算法进行更新,使接收波束具有特定的形状和希望的零点,使有用方向的信号通过,并抑制不需要方向的干扰及噪声[9]。
以7 阵元天线阵列为例,对于单个信源s(t)入射,7 个天线阵列的接收信号为:
式中,a(θ)为7 阵元天线阵列响应向量,n(t)为高斯白噪声。
此时输出为:
3 北斗/惯导深耦合增益分析
为提高抗干扰性能,在波束指向增益基础上采用深耦合技术可再次提高信号接收增益[11]。接收机锁相环(PLL)的主要相位测量误差源为相位抖动引入的误差和动态引入的误差。跟踪门限的经验判断方法为跟踪误差的3σ,颤动不能超过PLL 鉴别器相位牵引范围的1/4[12]。在相干解调时,由于信号中有调制的导航电文数据,必须使用PLL 二象限反正切鉴别器,线性牵引范围为180°,其3σ经验门限值为45°[13]。PLL 经验门限可以表示为:
式中,θε为PLL 跟踪环的动态应力误差,σj为除动态应力误差外其他误差源造成的1σ相位颤动,主要包括热噪声、振荡器噪声(振动和阿仑偏差引起的相位颤动)等。相干解调PLL 跟踪门限的1σ经验值为:
式中,σtPLL为1σ热噪声,σV表示由振动引起的1σ振荡器颤动,θA表示由阿仑偏差引起的振荡器颤动。
作为载波环主要的跟踪误差源,PLL 的热噪声计算公式可以表示为:
式中,Bn为载波环噪声带宽(Hz),CN0为载波噪声功率密度比,(C/N0)dB=10 lg(C/N0),T为预检测积分时间(s),λL为载波波长。
动态应力误差是根据系统的稳态误差得到的,它取决于环路的带宽和阶数[14]。如果环路滤波器对阶跃函数的响应有过冲,那么最大应力误差可能会稍大于稳态误差。设n为环路的阶数,则其3σ动态应力误差可表示为:
式中,dnR/dtn表示视线方向最大加速度(加加速度)值,单位为°/sn,ω0为跟踪环路的固有频率。固有频率与噪声带宽Bn之间的关系取决于环路阶数:一阶环路Bn=0.25ω0,二阶环路Bn=0.53ω0,三阶环路Bn=0.784 5ω0。
假设一个三阶环路的噪声带宽为18 Hz,接收机到卫星视线方向的最大加加速度为10 g/s,则其视线加速度动态可表示为:
由此,可以得到该三阶环路的3σ动态应力误差为15.35°。
在分析环路的跟踪误差与门限值的关系时,动态应力误差是作为3σ效应叠加到相位热噪声颤动误差上的。
对于锁相环,跟踪环路的带宽越窄,其PLL 误差越小,从而降低了跟踪门限处的CN0值(即CN0门限值)[15]。考虑高动态BD 接收机载体平台的加加速度为10 g/s,惯导提供的辅助信息误差小于1 ms,辅助后载波跟踪环的加加速度动态应力为0.01 g/s[16]。由仿真结果可知,普通北斗导航接收机带宽为18 Hz,加加速度动态应力为10 g/s 时,载噪比CN0门限值为28 dB-Hz;而惯导辅助的北斗导航接收机载波环带宽为5 Hz,加加速度动态应力为0.01 g/s 时,载噪比CN0门限值为19.8 dB-Hz。可见,在满足加加速度动态条件下,惯导辅助后北斗导航接收机的CN0门限值能够降低约8 dB-Hz。
由上述分析可知,普通北斗导航接收机的载波跟踪环带宽为18 Hz,对应的跟踪阈值为28 dB-Hz,当干扰源为窄带干扰时,载波跟踪环抗干扰能力为J/S=31.64 dB;当干扰源为宽带干扰时,J/S=34.65 dB。而在惯导辅助接收机中,典型的载波跟踪环带宽为5 Hz,对应的跟踪阈值为19.8 dB-Hz。当干扰源为窄带干扰时,J/S=40.23 dB;当干扰源为宽带干扰时,J/S=43.24 dB。表1 为普通北斗导航接收机与惯导辅助接收机的抗干扰性能对比,由表1 可见,惯导辅助北斗导航定位系统中,接收机的跟踪门限值比普通的接收机降低了约8 dB,而接收机的干扰信号功率比提高了8.59 dB,证明了深组合系统中的接收机比一般的北斗导航接收机跟踪性能提高约8 dB。
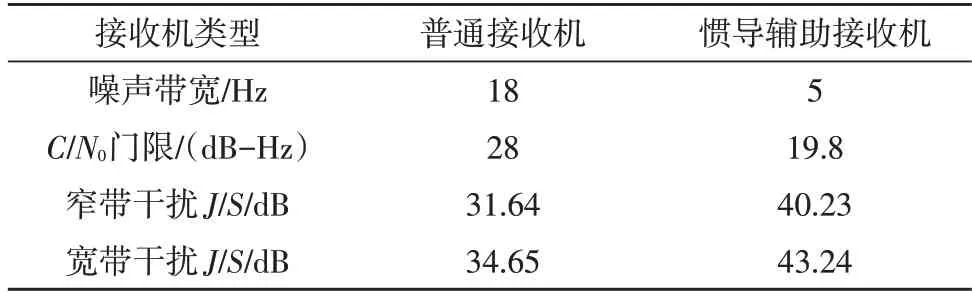
表1 普通接收机与惯导辅助接收机性能对比
4 实验验证
4.1 仿真分析验证
令14 个导航信号均匀分布在整个天顶。设置导航信号功率为-133 dBm,导航信号相对于噪声的信噪比(SNR)为-33 dB,施加六个宽带噪声干扰,干扰信号功率设置为-43 dBm,入射俯仰角和方位角分别为(25°,30°)、(65°,90°)、(45°,150°)、(45°,210°)、(65°,270°)和(25°,330°),即六宽带干扰干信比为90 dB。空时频联合处理对六宽带干扰陷零的响应图如图1 所示,抗干扰处理前后的信干噪比(SINR)统计结果如下:
输入信号的SINR=-97.8 dB(六干扰叠加),SNR=-33 dB。干扰抑制后SINR=-34.3 dB,SNR=-33.1 dB。抗干扰处理增益为69.6 dB。
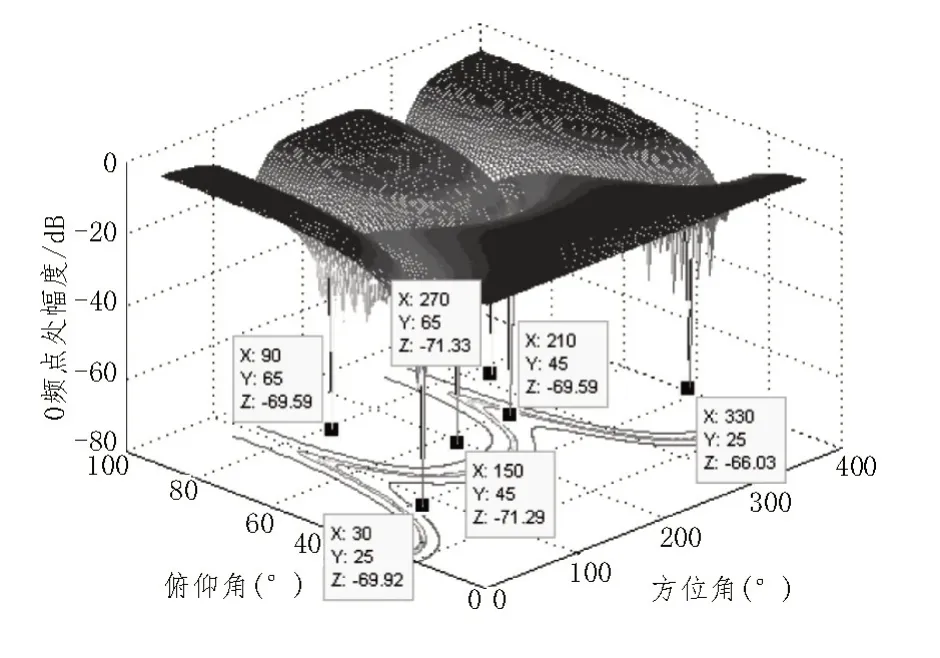
图1 六宽带干扰陷零响应图
根据前述分析对于干信比为90 dB 的六宽带干扰,抗干扰处理增益需要大于66.7 dB。根据仿真结果,抗干扰处理增益约为69.6 dB,能够满足干扰下的导航定位需求。
进一步对抗干扰处理前和抗干扰处理后的信号频谱进行分析,如图2 所示。
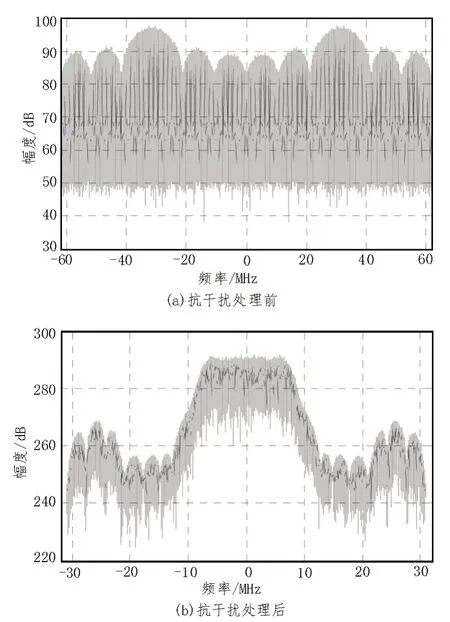
图2 抗干扰处理前信号频谱图
可见,经抗干扰处理后,有用信号带宽内的干扰信号被有效滤除,抗干扰处理功能有效。抗干扰处理后的信号可进行有效捕获。信号抗三宽带干扰捕获图如图3 所示。
4.2 实际测试验证
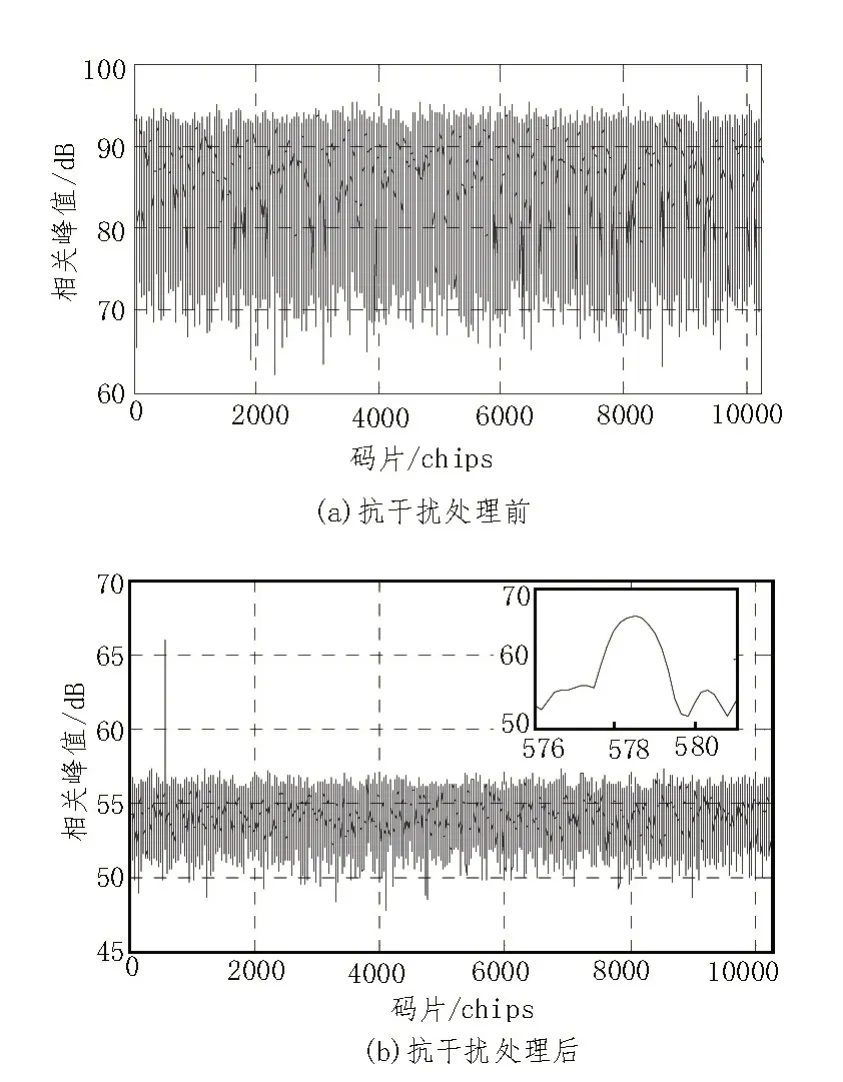
图3 信号抗三宽带干扰捕获图
采用该文算法的北斗卫星导航接收机组成测试系统进行抗干扰性能测试。干扰数量为六宽带干扰,干扰样式为宽带干扰。测试结果如表2 所示。测试结果表明:采用该文设计的导航接收机具有较好的抗干扰性能,抗六宽带干扰干信比优于90 dB。
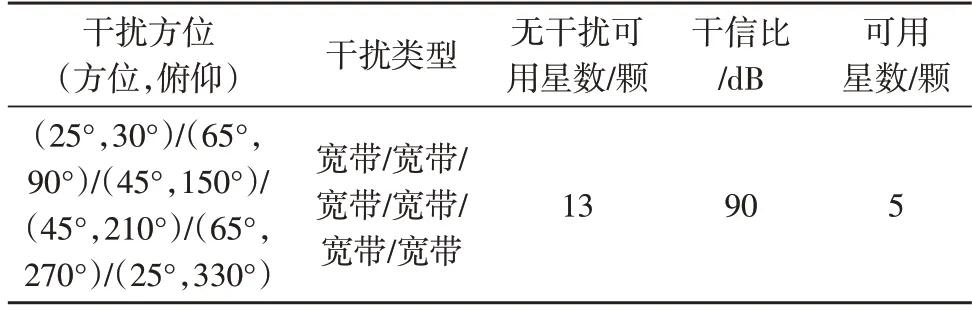
表2 抗干扰性能测试结果
5 结论
文中提出了一种北斗/惯导深耦合与数字多波束结合的自适应空时频抗干扰方法。该方法可有效体提升接收机处理增益,从而具有较好的抗干扰性能。针对该方法对六宽带干扰进行了仿真分析和实验验证。结果表明,采用该方法的卫星导航接收机具有较好的抗干扰能力,抗六宽带干扰干信比优于90 dB。
猜你喜欢
航天控制(2020年5期)2020-03-29
测控技术(2018年2期)2018-12-09
北京航空航天大学学报(2018年1期)2018-04-20
上海公路(2018年4期)2018-03-21
中国惯性技术学报(2017年1期)2017-06-09
祖国(2016年20期)2016-12-12
计算机工程(2015年4期)2015-07-05
电测与仪表(2014年8期)2014-04-04
现代防御技术(2014年6期)2014-02-28
铁路通信信号工程技术(2014年6期)2014-02-28
