
基于振动信号精确主频求解实现发动机转速测量的研究
2023-07-25 07:30王爱辉王选择张瑜灿尹晋平翟中生王浩伟
仪表技术与传感器 2023年6期
王爱辉,王选择,张瑜灿,尹晋平,翟中生,王浩伟
(1.湖北工业大学机械工程学院,湖北武汉 430070;2.中国特种飞行器研究所,结构腐蚀防护与控制航空科技重点实验室,湖北荆门 448035)
0 引言
汽车发动机转速是评定发动机性能的重要指标之一,通过外在手段快速测量转速对于汽车的生产与维修具有重要的意义[1-2]。在汽车外检等工程场景下,传统的汽车发动机转速测量需要在发动机转轴相关位置安装传感器,操作复杂,检测不便[3-6],因此,需要一种便携、高效、简易的测量方法,而利用发动机的外部振动信号间接测量汽车发动机转速可以有效克服上述缺点。
汽车发动机转速与振动频率有一定的对应关系,因此转速测量的问题可以转化为振动频率分析的问题。实现对振动信号主频频率的准确估计,即可满足发动机转速测量的要求[7-8]。
然而,发动机振动信号包含了大量的噪声信号与谐波信号,给主频的计算带来一定困难,对此,国内外许多学者进行了相关的研究,提出了诸多计算主频的方法。徐建等[9]提出一种基于单点虚拟振动功率的频率测量方法,引入PD指数因子自适应滤波,能够有效测量发动机振动主频,但基于转速单点虚拟振动功率的拟合关系测量发动机转速,需要测量前对待测发动机进行拟合,通用性不高。张帅等[10]利用三次自相关计算发动机每缸之间的时间差,移窗得到转速—时间曲线测量,通过小波消除基线漂移后,有效地提高了测量的精度。X. Shan等[11]提出振动信号与声音信号相结合的算法,通过提取2种不同的信号,互相关算法消除各自的噪声干扰,频率分析计算出主频,提高了测量稳定性。但是,现有的测量算法缺少对发动机缸数的识别,需预知发动机的缸数,才能计算发动机的转速,智能化程度低。
为此,本文提出一种基于移动正弦拟合的转速测量与缸数识别方法。通过截取一段时间的振动信号,首先进行FFT分析,粗略估计主频频率的大小;然后利用估计的主频频率计算1个取整的周期长度,以该周期长度作为正弦拟合的周期对振动信号进行移动拟合,一方面得到各点的拟合值,另一方面得到被拟合点的相位信息;基于拟合后的相位信息,通过解包裹算法的处理,得到精确的主频频率;然后以精确的主频频率为基础,对各点的拟合值进行平差处理,识别发动机的缸数;最后,根据转速与主频、缸数的数学关系,计算得到发动机转速。
1 基于振动的发动机转速测量原理
当发动机工作的时候,发动机曲轴上的激励载荷主要来自汽缸内的驱动力和运动部件往复运动的惯性力,其共同导致发动机外壳的规律性振动,分别表现为主频信号和谐波信号。从发动机曲轴的动力学分析可知,由于四冲程发动机每次点火曲轴旋转2圈,曲轴转速与发动机振动主频之间呈τ/2的关系,其中τ为发动机汽缸个数。数学表达为
(1)
式中:r为曲轴转速;τ为汽缸个数;f0为振动主频;s为发动机冲程数。
由于测量振动时,加速度计传感器安装在发动机某一部位,传感器与不同汽缸的距离不同,其测得的振动信号能量也不相同。以常见的四缸四冲程发动机为例,如图1所示,当传感器安装于发动机外壳某一部位时,与缸1相隔较近,缸1做功产生的振动较大,传感器信号幅值相应较大。缸2和缸4产生的信号幅值次之,缸3最小。

图1 四缸四冲程发动机工作示意图
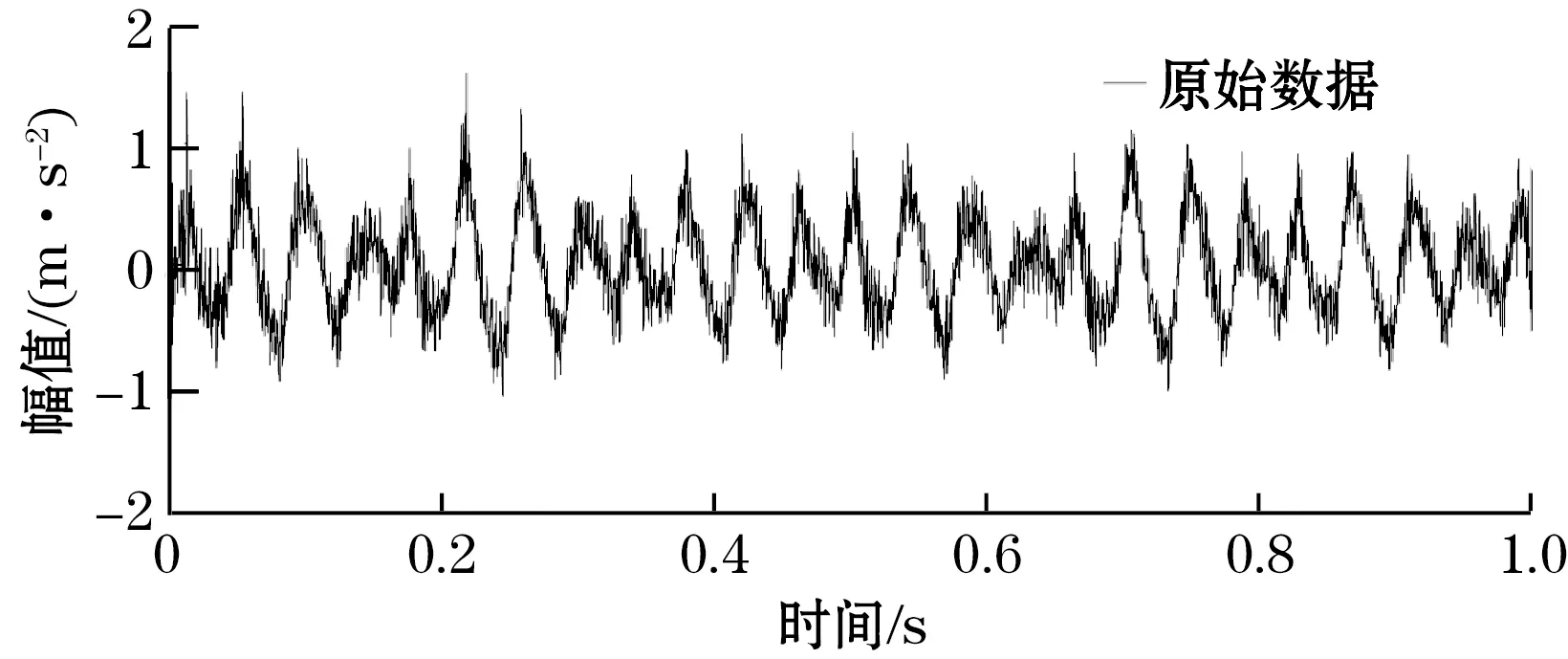
图2为传感器采样某四缸四冲程发动机的采样结果,采样1 s数据量m为5 000。从图中可以看出信号中含有幅值变化的振动信息,而且虽然信号中伴随着较大的高频噪声,但相邻2个发动机工作周期(图中括号段)内表现高度相似性。

图2 发动机振动信号
2 移动正弦拟合求取转速与缸数的方法
FFT常用于交流信号的频谱分析,但是在非整周期信号有限采样时间内,其精度不足。例如,对于采样周期为1 s的振动信号,FFT的分辨率为1 Hz,若待测车辆为四缸四冲程,则对应的转速分辨率为30 r/min,难以满足转速测量的要求。考虑到相位差法处理短时非整周期采样信号,具有更高的精度[12],本文提出通过移动正弦拟合得到信号的相位信息,再根据相位差精确计算信号主频的方法。
采用移动正弦拟合的方法精确计算振动信号的主频,需要首先确定一个与主频长度接近的整数值作为拟合的周期长度,再根据这个周期长度对振动信号进行分段逐点拟合。
2.1 正弦拟合及周期长度的确定
2.1.1 线性正弦拟合方法
幅值与直流偏置均为常数的单频正弦信号,一段时间内的离散采样序列yi={y0,y1,y2,…,yn-1},可以表达为
yi=Acos(i·Δ+φ0)+c+εi,i=0,1,2,…,n-1
(2)
式中:Δ为采样间隔相位;假设信号周期为k,则k=2π/Δ;εi为采样信号噪声误差;A、φ0和c分别为幅值、信号初始相位和直流偏置。
为了运用线性最小二乘拟合直接得到参数A、φ0、c的大小,令a=Acosφ0,b=-Asinφ0,式(2)展开为
(3)
式中:
(4)
式中atan2(b,a)表示四象限反正切值。
进一步,根据拟合算法可得:
(5)
式中:
(6)
(7)
通过求解式(5),计算出参数a、b、c的值,并根据式(4)确定该序列的初相位。
若确定的周期长度k为整数,且被拟合序列长度n为k的整数倍时,矩阵B可以简化为:
(8)
实际上,在后面的移动拟合过程中,一般直接取n=k,进行单周期的移动拟合。
2.1.2 周期长度的确定方法
在线性正弦拟合中,要求首先确定周期长度,且离散序列周期长度一定为整数值。若周期长度未知或不满足整数的情况下,实际采用的拟合长度越接近周期长度,拟合结果误差越小。
为此,这里拟合周期长度采用如下方案确定:首先对原始采样信号进行FFT运算,找到幅值谱的主峰值点对应的位置点,然后根据主频信号周期长度与峰值点位置Pm、采样信号长度m的关系,得到估计的周期长度k=m/Pm。
对图2中5 000个点进行FFT,频谱图见图3。由图3可知,幅值谱的主峰值点对应的位置点Pm=26 Hz,通过Pm估算拟合周期长度k=192点,满足k接近主频周期且为整数的要求。值得说明的是,在非整周期采样下,Pm位置点代表的频率与实际主频频率存在较大的误差[13],所以精确计算频率需要采用进一步的算法设计。
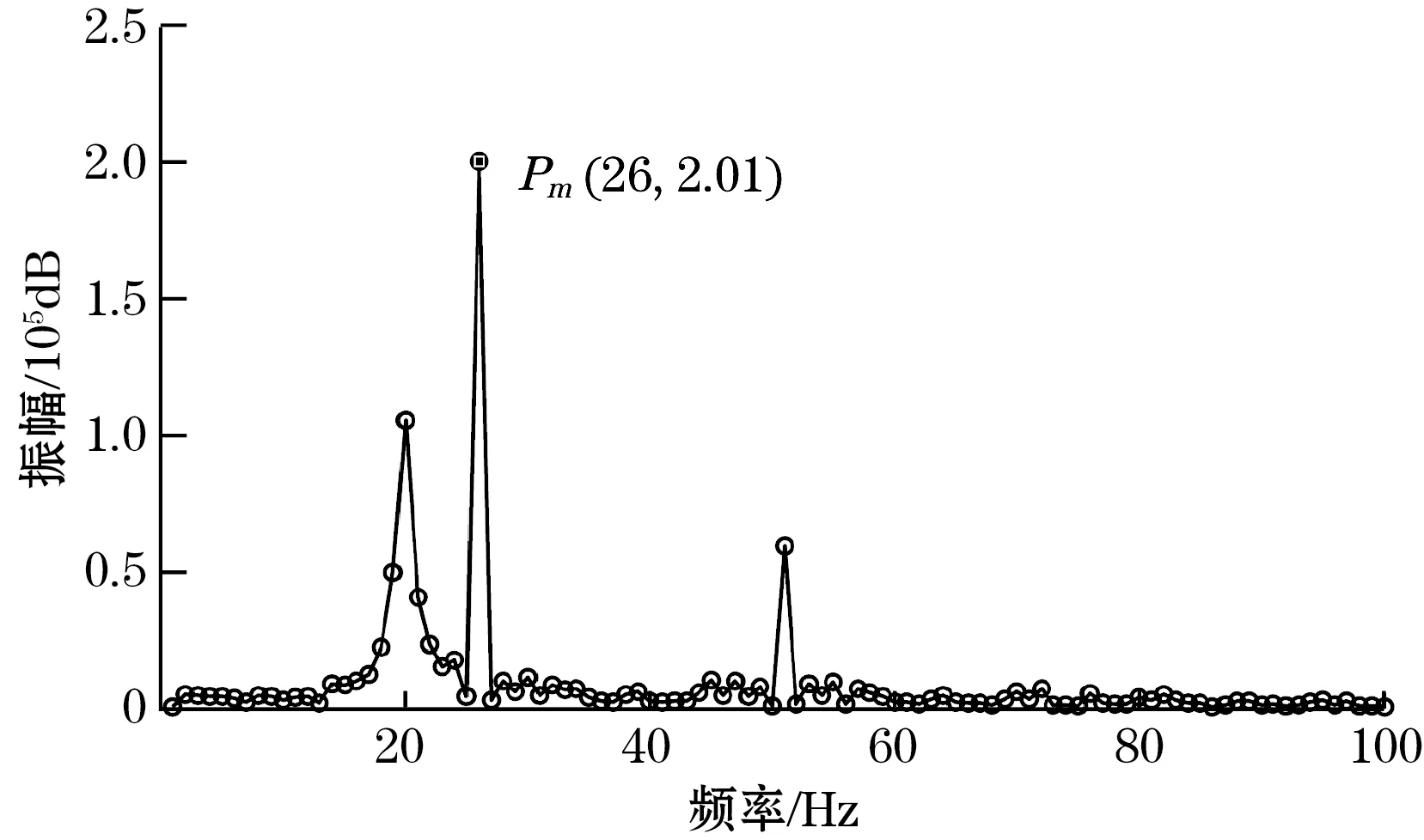
图3 FFT频谱图
2.2 移动正弦拟合原理
由上述推导可知,正弦拟合可以得到被拟合序列的初相位,移动正弦拟合类似于移动平均,通过分段逐段拟合,得到每段序列的初相位,形成采样信号上每点的相位信息。
图4展示了分段逐点的拟合方法,显示了第x、x+1与x+2次相邻3次拟合数据段的选取方法。重复的逐段正弦拟合必然导致较大的计算工作量。为此,根据相邻2次拟合区间存在大量重复数据,实际参与拟合的数据只是首尾2个点不同的特点,为了减少拟合计算量,采用递推的方法,以降低移动正弦拟合的计算量,提高算法的处理速度。具体公式推导如下。

图4 移动拟合示意图
设已知信号从x点开始的某一组拟合数据{yx,yx+1,…,yx+k-1}的传输矩阵为Yx,则下一组数据{yx+1,yx+2,…,yx+k}对应的传输矩阵为Yx+1。在移动拟合过程中,式(5)中B是恒定的,Y的变化受影响,其中:
(9)
(10)
通过数学推导,可以发现Yx+1与Yx之间存在如下递推关系:
(11)
通过式(11)只需要计算第1组数据的Y0值,就可以快速递推地拟合出整个采样时间内所有的Yx,再根据式(5)计算相应的ax、bx,从而得到各点的相位信息φx:
φx=atan(bx,ax)
(12)
这里被称为移动拟合相位,它的值被约束在(-π,+π)之间,被称之为包裹相位。图5为图2振动信号的移动拟合相位。

图5 信号的包裹相位
2.3 精确主频的计算方法
移动正弦拟合能够提高测量信号的精度,但是同时信号末端会损失一定的采样点。使用相位差法计算频率能够有效避免损失采样点导致的精度降低[14]。
相位差法计算频率的具体步骤如下:
(1)通过包裹相位计算连续化相位,求解公式为:
(13)
式中Wi为解包裹运算符:
(14)
(2)得到连续相位后,利用两点之间的相位差与时间差,计算精确主频:
(15)
式中:m1、m2分别为同类零点(上升、下降)或同类极点(波峰、波谷)所对应的2个位置;Ts为采样周期。

(16)
3 缸数识别算法的设计
由式(1)可知,发动机转速计算需要预先已知缸数。从图6拟合后的ax值可看出,在发动机的每个工作周期之间信号表现为高度相似性,而信号相似度越高,相减结果越接近0,因此利用平差法可以识别工作周期。
(a)原始数据
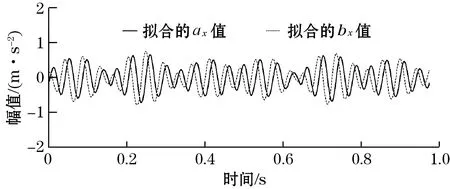
(b)拟合ax、bx图6 拟合后的ax、bx值
考虑到工作周期为主频周期的τ倍,τ为发动机的缸数。选用主频周期整数倍长度作为平差长度进行匹配计算与结果判断。
在平差计算中,避免受随机噪声与直流漂移干扰的影响,平差计算直接针对移动拟合结果ax进行数据处理,图6显示了图2信号进行移动正弦拟合的ax、bx值。其中,ax、bx相位相差π/2,相对于原始信号,虽然ax损失了一定数量的采样点,但是有效提高了信噪比。
平差的步骤如下:
(17)
式中τ为汽缸个数,τ=1,2,3,4…。

(18)
τ取不同值,对图6中的ax值进行平差法计算的结果Zi如图7所示。

(a)τ=1

(b)τ=2

(c)τ=3

(d)τ=4

(e)τ=5

(f)τ=6图7 平移作差结果
(3)计算τ值不同时,平差值Zi的方差σ2:
(19)

取σ2最小时所对应的τ值作为缸数。图7(d)的Zi方差最小,由此可以识别本汽车发动机为4缸发动机。将τ与式(15)中计算的精确主频f0代入式(1),则可以准确计算出汽车发动机转速。
4 实验
4.1 精度验证分析
为了验证本方法的精度,使用标准振动仪验证。振动仪为220 V 50 Hz市电供电,仪器内含有2个磁性线圈,振子在2个磁性线圈做周期往复运动,其振动信号频率应为标准的100 Hz。将型号为Lis344的加速度计传感器磁性吸附于振动仪工作表面,经过信号调理电路,使用STM32F407单片机的A/D功能进行采集,采样频率为5 kHz,采样周期Ts=0.2 ms,远高于信号频率,能够满足精度要求。
由于实际发动机转速测量中,采样信号的长度不可能恰好为信号的整周期量。为了模拟实际测试中信号非整周期数据量的测试条件,对于标准的100 Hz信号,截取T=0.333 s内(33.3个信号周期)即1 667个采样数据,分别进行FFT与移动正弦拟合分析,对比其计算结果。
FFT的计算结果如图8,由于只截取0.333 s时间内的数据,因此实际频率应为图示主频的3倍。由图可知,在非整周期采样下,FFT直接计算的主频频率为fFFT=34/T=102 Hz,误差为2%。
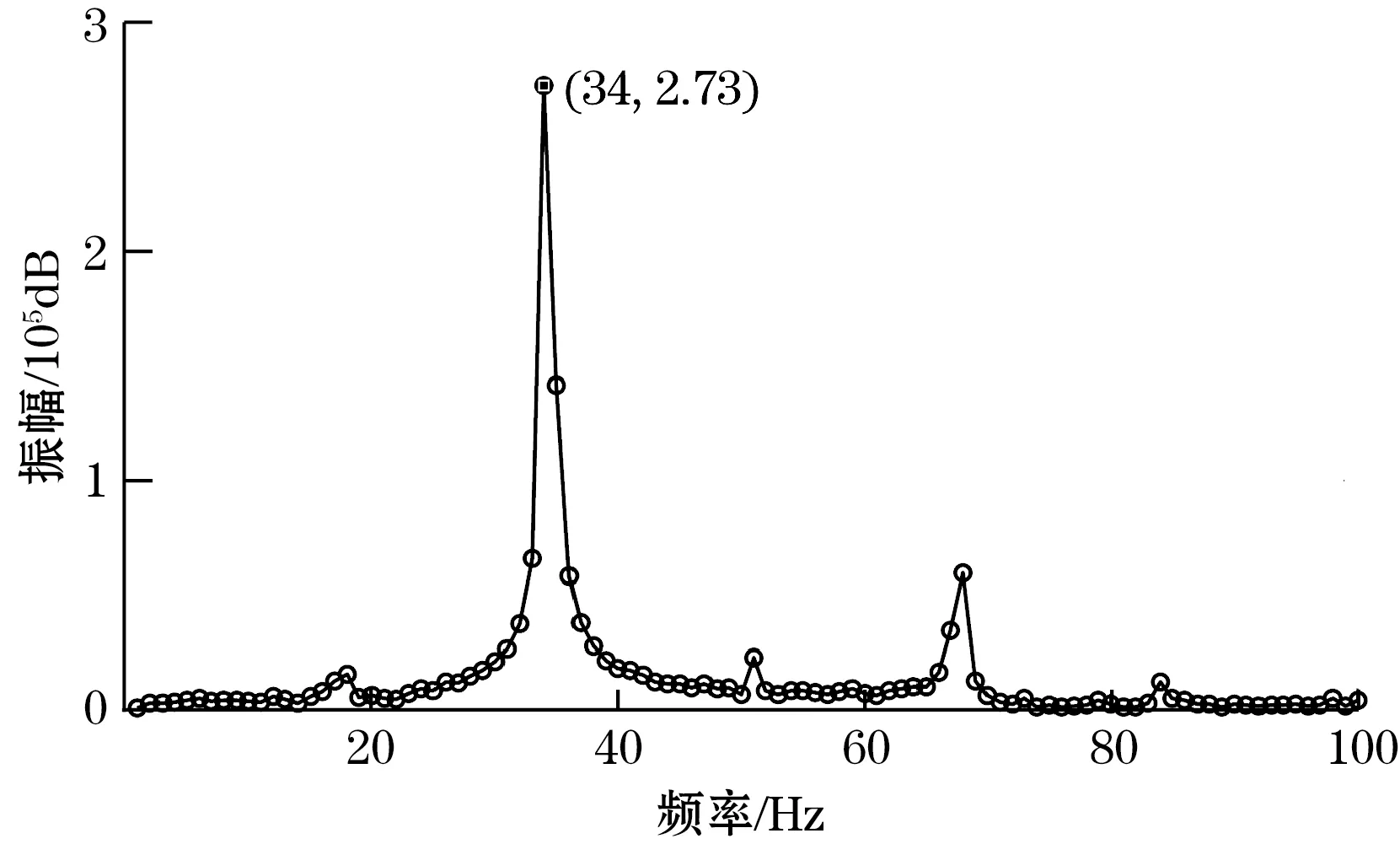
图8 FFT频谱图
移动正弦拟合后,信号的相位如图9,从图中看出,找到拟合后两端的上升零点m1、m2,两点的相位差为203.07 rad,采样序列差值为1 615,代入式(15)可得f0=100.06 Hz,误差为0.06%,显著提高了精度。

图9 移动正弦拟合得到的相位图
4.2 实际测试
对发动机型号为本田L15BL四缸四冲程汽油发动机进行了实际测试,实验现场如图10。将Lis344加速度计磁性吸附在发动机机盖上,STM32F407单片机A/D采集振动信号,采样频率为5 kHz,算法通过单片机实现,计算转速并显示。获取车载OBD接口输出值,其值作为实际转速进行对比。

图10 本田L15BL发动机测试图
进行发动机非平稳状态下的验证,实验中空挡滑行模拟汽车正常行驶转速,通过踩油门来控制发动机的转速。通过多次试验的结果分析,得到本算法在非稳态条件下的数据记录如表1,缸数计算为4缸,计算转速精度达到0.4%,符合转速测量的要求。
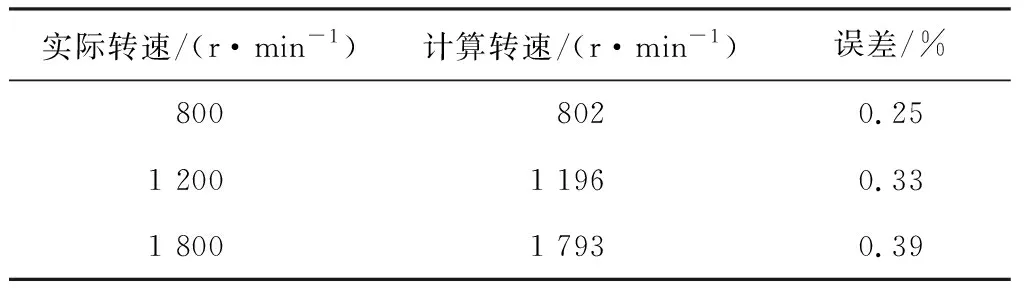
表1 实验记录
5 结束语
针对传统汽车发动机转速测量方法存在的操作复杂、检测不便等问题,提出基于振动测量的发动机转速测量方法。Lis344加速度传感器采集振动信号,经过信号调理电路转化成适合A/D采集的信号,再用STM32F407单片机进行采集处理。对信号进行一次FFT变换得到粗略的频率;在此基础上对信号进行移动正弦拟合,同时得到拟合后的信号与 拟合后的幅值与相位;计算首尾两点的相位差计算精确的主频;在得到精确主频后,利用线性插补的平差法计算发动机汽缸数;最后,根据精确的主频和发动机汽缸数,精确计算出汽车发动机的实时转速,整个算法由单片机内部资源实现。实验表明,该方法测量精度相对较高,满足发动机转速的振动测量要求。
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28
数学小灵通(1-2年级)(2020年9期)2020-10-27
中学生数理化·高一版(2018年6期)2018-07-09
作文大王·低年级(2017年11期)2017-12-05
小学生学习指导(低年级)(2017年12期)2017-11-22
电子制作(2017年7期)2017-06-05
中学生数理化·高二版(2016年9期)2016-05-14
电测与仪表(2016年15期)2016-04-12
读写算(上)(2015年6期)2015-11-07
电源技术(2015年5期)2015-08-22
