
微半球谐振陀螺角速度解算优化与噪声抑制方法研究
2023-07-25 07:29丁徐锴李宏生
仪表技术与传感器 2023年6期
陈 洋,丁徐锴,李宏生
(东南大学仪器科学与工程学院,江苏南京 210096)
0 引言
微半球谐振陀螺仪是一种基于哥氏效应工作的高精度振动陀螺仪[1],利用径向振动驻波的进动效应来检测基座旋转。其具有体积小,性能好,抗噪声等优点[2],是工业领域广泛使用的惯性导航器件[3]。
微半球谐振陀螺仪通常有力平衡和全角2种工作模式。在全角模式下,通过外界给定激励产生驻波振型,当外界存在旋转时,根据Bryan效应[4],哥氏力将引起驻波进动。当外界旋转角频率远小于谐振子的谐振频率时,可以认为振型的进动角度与外界旋转角速度成正比,因此通过对振型角速度的计算可以得出外界旋转角速度的大小。
然而,由于全角模式对谐振子结构的对称性要求十分严格,目前的加工工艺不可避免地会引入结构误差,使得谐振子能量损耗不均匀,进而导致频率裂解以及阻尼失配等固有误差[5],极大地影响角速度测量精度。赵万良[6]通过对采集数据和拟合数据求出理想进动角和实际进动角之间的误差,并通过数学补偿的方法,降低了角度测量误差。加州福利亚大学欧文分校团队[7]通过识别和补偿增益失配,角度误差降为原来的1/10。方海斌等[8]通过改进信号处理方式以及降低电路热噪声的方式,减少了半球陀螺的输出噪声。朱枫等[9]提出用跟踪微分器对陀螺角速度信号进行滤波,缩短了系统的上升时间与调整时间,提高了航空光电稳定平台的视轴稳定精度。
本文将根据半球陀螺仪的通用运动方程对微半球谐振子角度解算进行分析,针对常规解算方法得出的角速度信号中有跳点的现象,采用一种基于偏导法的解算方法,消除角速度信号中的跳点,并通过仿真和实验进行了验证;针对角速度信号噪声较大的现象,利用自抗扰控制算法,减小角速度信号的噪声,并通过理论分析、仿真和实验验证了抑制角速度信号噪声的可行性。
1 微半球陀螺测控原理与角度解算原理
根据Lynch半球谐振陀螺理论模型[10],半球谐振陀螺的运动方程为:
(1)
式中:Ω为外界角速度;fx和fy为电极上施加的静电力;θω为频率主轴方位角;θτ为阻尼主轴方位角;ω为谐振频率;τ为时间衰减常数。
且有:
(2)
式中:ω1为陀螺谐振子频率主轴x的谐振频率;ω2为频率主轴y的谐振频率;τ1和τ2为2个主轴的衰减时间常数。
理想情况下陀螺谐振子运动轨迹如图1所示。图1中,a为理想谐振子椭圆轨道长半轴,q为短半轴,θ为长轴方位角,φ′为理想谐振子振动的相位。

图1 微半球谐振子理想轨道模型
使用平均法[10]对式(1)进行分析,可以获得如下缓变量:
(3)
式中:E为陀螺振幅,Q为陀螺正交误差量;R、S用于解算进动角;L用于表征相位误差;sx,cx,sy,cy分别为x、y方向位移信号的正余弦分量;φ为谐振子振动的相位。
在全角模式下,谐振子振型随外界输入角速度而自由进动,且振型角速度与外界输入角速度成正比。当谐振子工作在谐振频率时,用较小的驱动力可以获得较大的振幅,但谐振子工作环境的改变会导致谐振频率不断变化,需要设计锁相环回路实现相位锁定,保证激励电压频率与谐振频率一致。为了使幅度E不受损耗,需要不断补充能量,设计幅度控制回路,保持幅度E稳定。同时,为了抑制陀螺谐振子的正交误差,设计正交控制回路,将Q控制在0附近。此时,根据谐振子的振型进动角速度可以反推出外界角速度的大小。
根据式(3)可推出振型进动角度θ的表达式为
(4)
然而,由于arctan函数的局限性,式(4)计算出的θ范围为[-π/2,π/2],为了能够在直角坐标系下正确地观察振型进动,对θ进行如下扩展[11]:
(5)
扩展后θ的范围为[-π,π]。
2 基于偏导法的角速度解算优化
利用常规的微分法可得角速度为
(6)
由式(5)可知,角度在-π和π处会发生突变,故用微分法得出的角速度会在此处产生跳点。在Simulink中搭建仿真模型,设置外界旋转速度为30(°)/s,角增益因子为-0.5,此时振型角速度应为
(7)
通过仿真得到的角速度信号如图2所示。

图2 原始算法角速度信号仿真
由图2可知仿真结果与理论计算一致,但跳点现象十分明显。常规做法为设置阈值η,当θ发生变化时,判断|θnow-θlast|与η的大小,其中,θnow为当前角度值,θlast为上一时刻角度值。出现跳点时,在角速度解算中减去对应跳变值,即
(8)
在Simulink中进行仿真,参数与之前设置相同,仿真得到的角速度信号如图3所示。
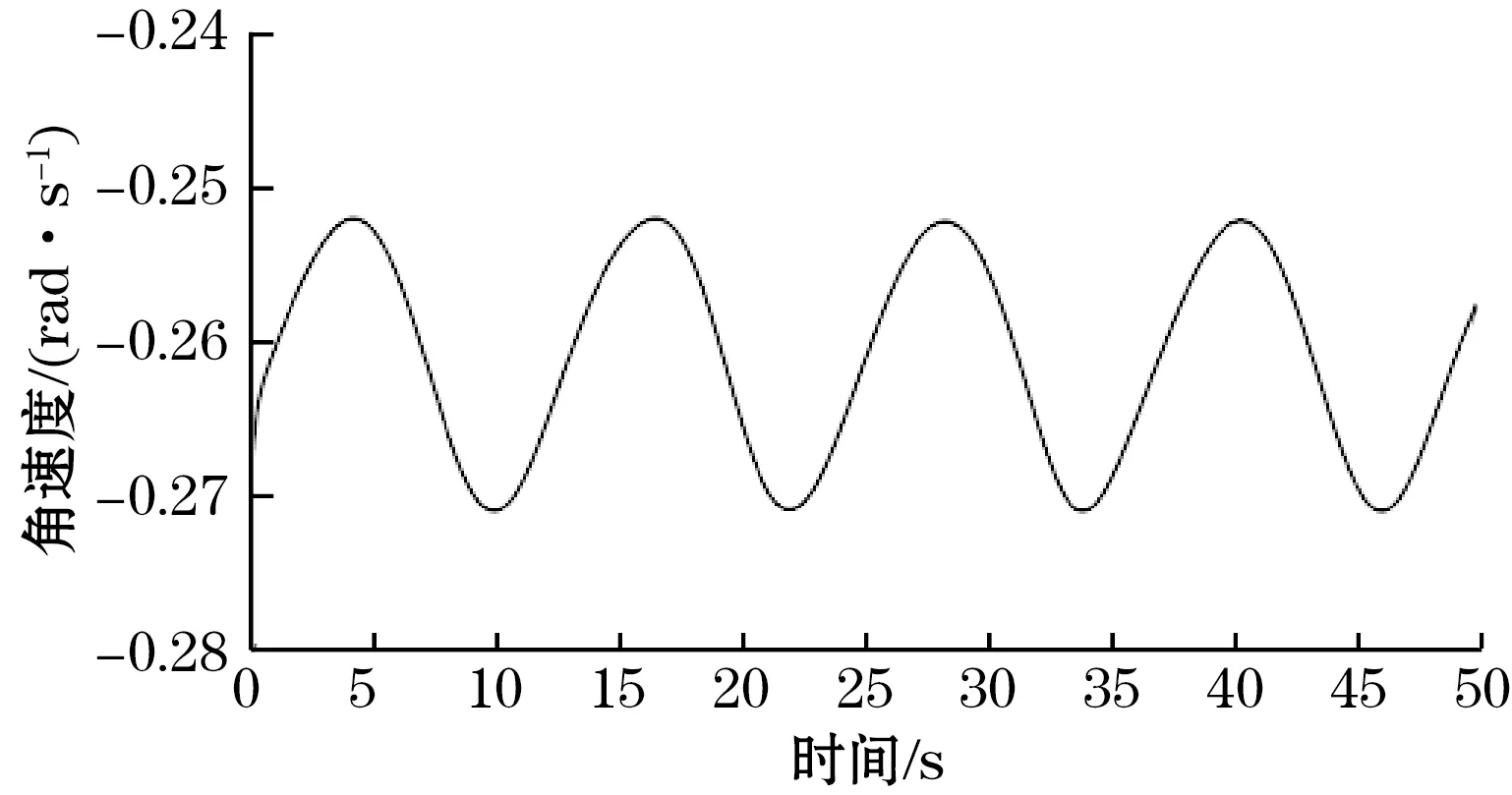
图3 常规算法角速度信号仿真
由图3可见,常规算法在理想模型中消除了跳点现象。但由于硬件电路等噪声信号的存在会影响式(5)中cx和S的值,导致判别出错,实际实验中,在某些时刻仍会出现跳点现象。
针对常规算法仍不能完全解决跳点现象的问题,利用偏导法对角速度进行求解,根据式(6)可得:
(9)
式中
U2=R2+S2
(10)
根据式(3)可知,缓变量S和R不会发生突变,故式(9)为连续函数,且此时θ的范围为[-π,π],利用函数连续性便可消除跳点现象。在Simulink中进行仿真,得到的角速度信号如图4所示。

图4 偏导法消除跳点仿真图
由图4可见,利用偏导法消除了角速度信号中的跳点现象。
3 基于自抗扰控制的角速度噪声抑制
在半球谐振陀螺全角控制模式下,由于谐振子的结构不够理想以及硬件噪声等问题,利用常规微分的方式得出的角速度信号噪声较大,考虑利用自抗扰控制算法中的跟踪微分器对信号噪声进行抑制。
自抗扰控制算法主要包括3个部分:ESO(状态观测器),非线性PID控制器以及TD(跟踪微分器)。ESO目的是根据系统输出估计出系统变量的扩张状态,并输出系统变量的估计值,根据系统输入与观测器的输出估计值,得到输入信号的误差,利用非线性PID进行控制,由此可以对总扰动量进行估计和补偿,增强了系统的鲁棒性。TD的目的是为了给输入信号安排过渡过程,利用TD可以有效避免信号发生突变,而是使得输入信号缓慢变化过去,有效避免常规微分器在输入信号发生突变时,输出信号出现较大波动的现象,从而改善输出信号的信噪比,其离散化形式为
(11)
式中:T为系统采样时间,本文T=0.001 s;r为速度因子,决定跟踪微分器的跟踪速度;v0(k)为跟踪微分器输入;x1(k)为过渡信号,是跟踪v0(k)的信号;x2(k)为x1(k)的微分;y(k)为跟踪微分器输出。
由于存在硬件噪声等问题,在式(9)中利用常规微分器获取角速度信号时,S、R信号中通常混有噪声信号γS(t)和γR(t),此时角速度输出为
(12)
式中:
(13)
由式(12)可见,当采样时间越小,对噪声的放大作用越明显,在Simulink中搭建仿真模型,在原始的R和S信号中分别加入均值为0,方差为1×10-10的随机噪声,角速度信号如图5所示。

图5 偏导法角速度信号仿真
根据图5可见,常规微分器下噪声信号对角速度信号影响较大。
为减弱噪声的放大效应,针对式(9)中的微分项,将跟踪微分器替代常规微分器,此时角速度为
(14)
式中:T1和T2均为采样时间,且有
(15)
由式(14)可见,跟踪微分器对噪声信号起到了抑制作用。在Simulink进行仿真,其余参数与之前相同,仿真图如图6所示,仿真结果表明,跟踪微分器减小了角速度信号噪声。
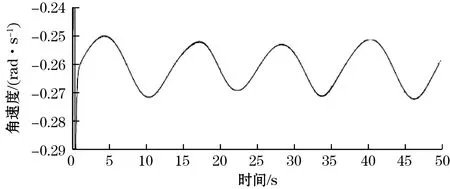
图6 跟踪微分算法角速度信号仿真
4 实验
4.1 实验平台和测控系统
为进一步验证本文所提算法的正确性,对微半球谐振陀螺进行实验验证,图7为测控电路。

图7 测控电路实物图
4.2 实验验证
将测控电路与半球陀螺谐振子放置在转台上,接通测控电路电源,设置陀螺仪输出采样频率为125 Hz,设置转台以+30 (°)/s的速率进行转动。实验结果如图8所示,可以看出常规算法存在跳点现象,利用偏导法进行角速度解算后实现了跳点现象的消除,但存在较大噪声,通过自抗扰控制算法,角速度信号的噪声得到明显抑制。
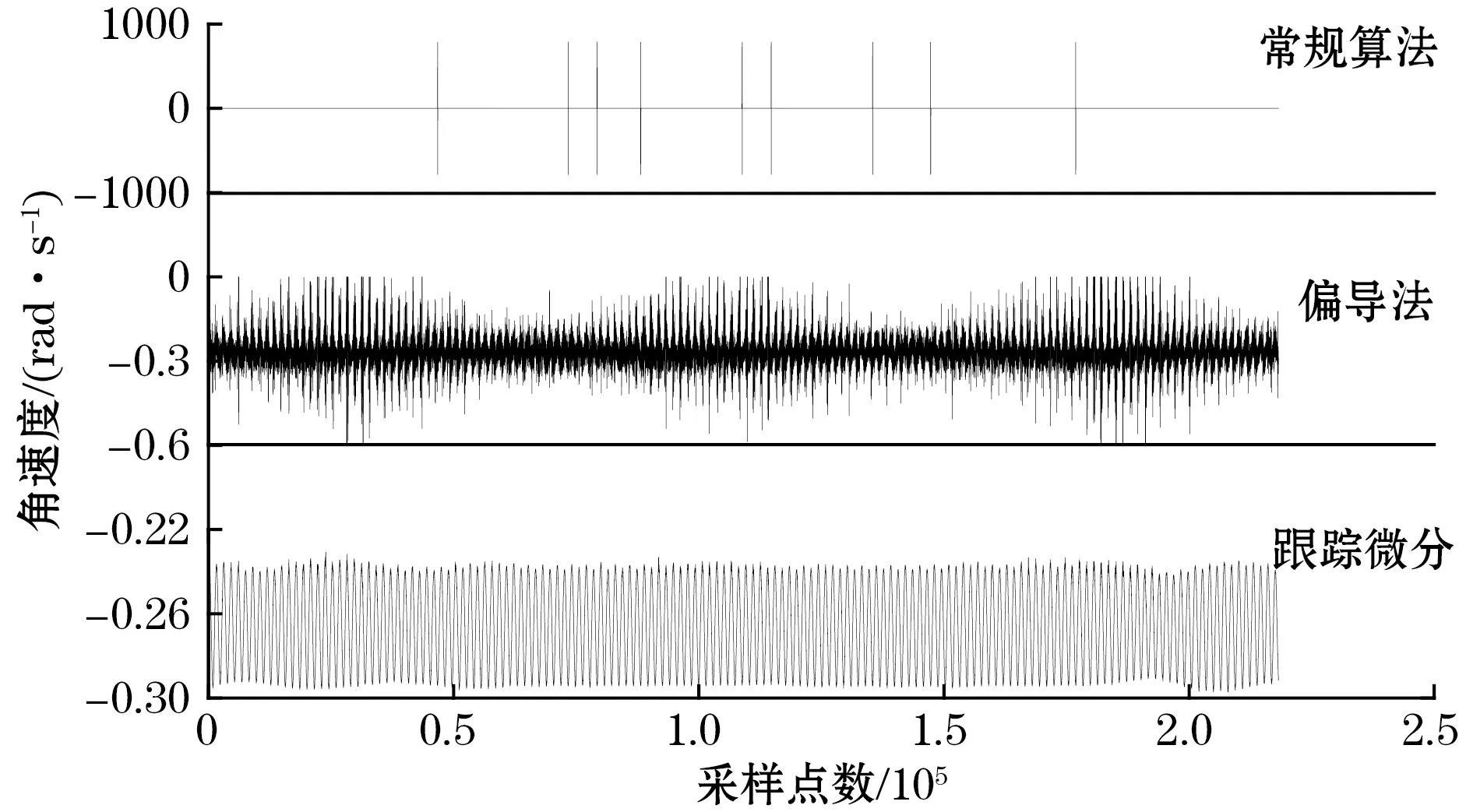
图8 实验数据图
由式(7)可知,当外界角速度为30(°)/s时,振型进动角速度为-0.261 8 rad/s,与实验结果一致。
根据式(11),速度因子r对噪声抑制效果有较大影响,设置陀螺仪外界输入角速度为0 (°)/s,采样时间30 min,不同速度因子下角速度噪声如表1所示。

表1 速度因子对噪声的影响
由表1可见,随着速度因子r的增大,跟踪微分器对噪声抑制效果越好,并且随着r的增大,跟踪微分器对噪声的抑制效果越来越不明显。
为了进一步验证自抗扰控制算法抑制噪声的有效性,设置陀螺仪输出采样频率为1 Hz,采样时间1.5 h,零偏稳定性以及角度随机游走对比结果如表2所示。
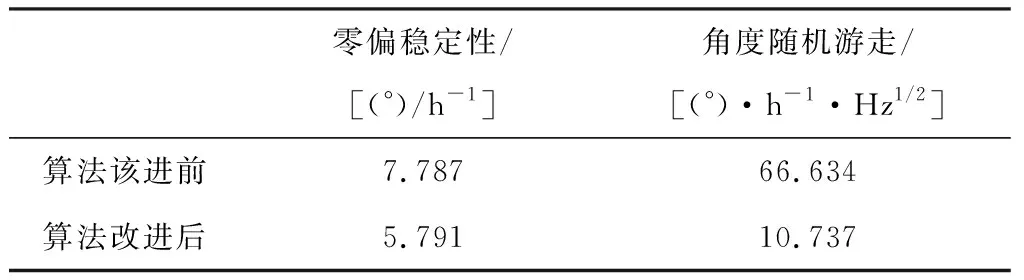
表2 陀螺噪声性能对比
实验结果表明,通过自抗扰控制算法,有效抑制了陀螺仪角速度信号的噪声。由表2可知,输出角速度信号的零偏稳定性提高了25.63%,角度随机游走降低了83.89%。
5 结论
本文针对微半球谐振陀螺在工作状态下输出角速度信号存在跳点现象的问题,用偏导法对角速度解算方法进行优化,实验证明该方法可以消除跳点现象。针对输出角速度信号噪声较大的问题,通过自抗扰控制算法进行处理,测试结果表明,通过自抗扰控制算法,输出角速度信号的噪声得到明显抑制,具有应用价值。
猜你喜欢
中国惯性技术学报(2019年1期)2019-05-21
纤维复合材料(2018年2期)2018-12-07
雷达学报(2017年1期)2017-05-17
中国化肥信息(2016年33期)2016-05-17
系统工程与电子技术(2016年2期)2016-04-16
现代防御技术(2014年4期)2014-07-10
振动、测试与诊断(2014年6期)2014-03-01
现代防御技术(2014年6期)2014-02-28
常熟理工学院学报(2011年4期)2011-03-20
常熟理工学院学报(2011年4期)2011-03-20
