
引江济淮工程(安徽段)控制网设计与实施
2023-05-25 09:24程启明
黑龙江水利科技 2023年4期
程启明
(安徽省水利水电勘测设计研究总院有限公司,合肥 230022)
0 引 言
引江济淮工程是以城乡供水和发展航运为主,结合农业灌溉补水和改善巢湖及淮河水生态环境、防洪排涝等综合利用,为跨流域、跨省的重大战略性水资源配置工程。工程从长江下游引水,经巢湖穿越江淮分水岭,向淮河中游地区补水,不仅改善皖北地区水资源紧缺状况,还改善巢湖水生态环境、增加淮河生态基流。工程自南向北依次分为引江济巢、江淮沟通、江水北送三大段落。
引江济淮工程安徽省境内输水线路总长587.4km,沿线控制性建筑物数量多、类型广。输水河道分批分段施工,施工单位多,建设周期长。工程设计和施工阶段,各参建单位共布设控制点约1500 余座。由于控制网来源于不同的建设单位、不同的仪器和方法、各局域网互不连通,导致控制点埋设不合理,基准不统一,精度不一致。基于上述情况,必须建立全线点位合理、基准兼容、精度统一的测量控制网,为工程建设期施工、竣工期验收和运行期监测提供统一的控制测量基准。此外,考虑到重要建筑物地区的投影变形要求, 为保证工程质量提供可靠的平面系统。在仪器、观测及数据处理等方面, 充分利用先进的现代测绘技术和手段,以期最终实现施工河段精准贯通,竣工河道水势流畅[1]。文章系统介绍了控制网设计方案、标石埋设、外业观测、数据处理及精度统计等情况,可供类似大型水利水电工程以借鉴。
1 布网原则及方案设计
1.1 控制网布设原则
根据控制网的目的和用途,平面和高程控制网在全面控制、统一设计、整体实施的原则下,按高精度、可靠性、可行性、经济性等目标优选最佳布网方案。采取整体布局、分区分级布设,以已有成果、测区地形、交通状况、作业效率等因素综合考虑,优化设计,既满足工程不同时期建设需要,又经济合理。
1.2 控制网方案设计
根据工程规模和线路长度,为满足输水河道和沿线建筑物施工对控制点的密度和精度要求,同时考虑到工程竣工验收和运行管理阶段的测量需要,确定基本平面控制等级为D 级,首级高程控制等级为二等。根据控制网设计等级和工作量,平面控制采用GNSS 测量,高程控制采用水准测量的方案。由于工程输水线路长、控制面积大,沿线建筑物多,施工周期长,为统一控制基准和保证精度要求,经充分论证,选择以下设计方案。
1.2.1 平面控制网方案设计
平面控制网分区布设。基本网以国家B、C 级GPS 点为基准,沿工程输水河道两侧均匀布设D 级GNSS 控制点,点间距为5km 左右。由于跨巢湖区域水面开阔,南北两岸相距约10 ~20km,沿巢湖周边采用C 级GNSS 控制点布设,以满足控制网的精度要求。选取8 座枢纽及4 座重要建筑物,每处控制点增加至不少于4 个,平面精度按二等布设,对于长度投影变形值超出2.5cm/km 的测区,其平面坐标采用“一点一方向”挂靠于基本网的国家坐标系下。
C、D 级GNSS 控制网采取连续网形结构,同期同步观测,整体数据处理。建筑物测区二等GNSS 控制网分片布网,分段观测,分片数据处理。各等级GNSS 控制网的精度要求见表1。
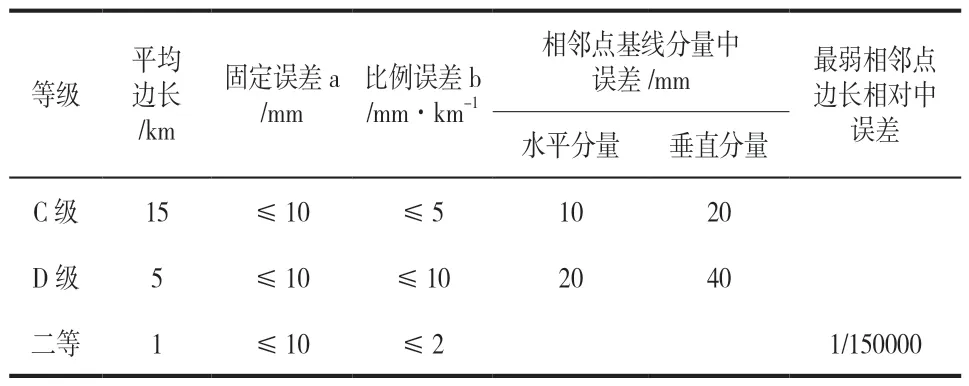
表1 平面控制网精度要求
1.2.2 高程控制网方案设计
高程控制网分级布设。首级高程控制以国家一、二等水准点为基准,采用二等水准网沿输水河道单侧布设,普通标石间距为5km 左右,基本标石间距为30km 左右(即每5 座普通标石采用1 座基本标石间隔)。加密高程控制网以首级二等水准点为基准,采用三等水准测量,联测工程范围内所有平面控制点高程。二、三等水准高程控制网精度要求见表2。
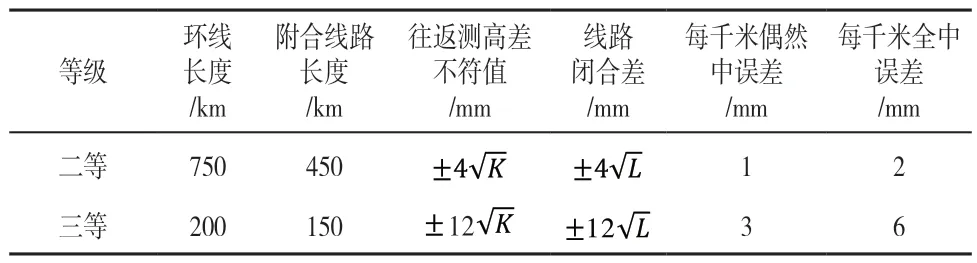
表2 高程控制网精度要求
2 控制网实施
2.1 平面控制网测量
2.1.1 标石埋设
平面控制点位经优化设计后, C 级GNSS 点采用混凝土预制基本标石, D 级和二等GNSS点采用混凝土预制普通标石。基本标石柱体上表 面20cm×20cm、 下 表 面40cm×40cm、 柱 高55cm,普通标石柱体上表面20cm×20cm、下表面40cm×40cm、柱高40cm。标石埋设时,底部浇筑70cm×70cm 面积、20cm 厚的混凝土底盘。
2.1.2 观测方案
GNSS 控制网使用2.5mm+1ppm·D 精度的双频GNSS 接收机进行静态组网观测。跨巢湖区域的C 级GNSS 网为增强网形结构、提高观测精度和减小设站对中误差,一次性采用15 台接收机,同步观测2 个时段,每时段观测时长圴超过4h。D 级和二等GNSS 网,采用大地多边形构网,其中D 级网采用12~16 台接收机同步观测1 个时段,观测时长超过1h;二等GNSS 网根据15 个独立测区的点位数量,分别采用6~8 台接收机一次性同步观测2 个时段,每时段观测时长超过1.5h[2-3]。
2.1.3 GNSS 基线处理
各等级GNSS 控制网的观测数据按单基线双差固定解进行基线解算,解算结果对重复基线、同步环、异步环分别按表3 要求进行数据质量检核。
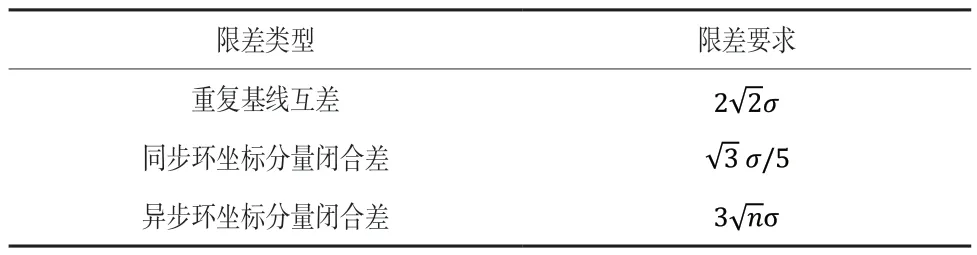
表3 GNSS 控制网同步环、异步环、重复基线闭合差限差要求
上表中,n 为闭合环边数,σ 为相应等级的相邻点间基线精度,以平均边长计算(下同)。
C 级网重复基线最大互差为6.7mm,同步环坐标分量最大闭合差为34.2mm,异步环坐标分量最大闭合差为40.5mm。D 级网蜀山泵站枢纽以南分区的重复基线最大互差为11.9mm,同步环坐标分量最大闭合差为36.5mm,异步环坐标分量最大闭合差为88.9mm;蜀山泵站枢纽以北分区的重复基线最大互差为11.0mm,同步环坐标分量最大闭合差为20.2mm,异步环坐标分量最大闭合差为31.9mm。GNSS 控制网基线三项检核精度均满足上述限差要求。
2.1.4 GNSS 网平差
GNSS 控制网先进行三维无约束平差,再在国家坐标系下进行二维约束平差。无约束平差的基线分量改正数绝对值需满足公式(1)的要求,约束平差的基线分量改正数与无约束平差结果的同一基线,相应改正数较差的绝对值需满足公式(2)的要求。
工程C、D 级网无约束平差后的三维坐标分量改正数均小于1/3 限差。
本工程C 级网共联测1 个B 级GPS 点和2 个C 级GPS 点,D 级网共联测24 个C 级GPS 点。二维约束平差时,为了检核联测国家GPS 点位的精度,在最终平差方案确定前先采用不同的联测点组合方案进行试算,并将平差结果与已知成果进行比较并分析,逐步剔除点位位移较大的已知联测点,以获得最佳的二维约束平差方案。经平差后,C 级网最大点位中误差为7.9mm,D 级网蜀山泵站枢纽以南分区最大点位中误差为9.2mm,蜀山泵站枢纽以北分区最大点位中误差为18.5mm。
工程枢纽及重要建筑物测区二等GNSS控制网,为满足控制点间投影边长变形值不大于2.5cm/km的要求,经计算兆河节制枢纽、凤凰颈引江枢纽、龙德闸、朱集站测区的边长变形值大于此值。控制网在国家坐标系下平差后,以测区内一点的坐标为起算点,该点至另一点的方位角为起算方向,边长不进行高斯投影改正(选择一条起始边,投影至测区中央子午线),选择测区的平均高程面作为边长投影面,进行挂靠国家坐标系的计算[4-5]。
2.2 高程控制网测量
2.2.1 二等水准点埋设
二等水准点位经优化设计后,采用混凝土预制基本和普通两种标石。标石为长方体柱形,截面20cm×20cm、柱高120cm。标石埋设时,上部嵌入预制窨井并加盖标志盘,基本标石底部浇筑120cm×120cm 面积、20cm 厚的混凝土底盘,普通标石底部浇筑60cm×60cm 面积、20cm 厚的混凝土底盘。
(1)屋盖桁架在场馆外进行吊装。该工程结构新颖,其支撑设计、桁架安装过程节点选择、杆件应力与应变控制、主桁架高空拼装和58 m超长桁架吊装技术,均需进行严密的验算。
2.2.2 水准观测方案
二、三等水准使用0.3mm 精度的数字水准仪及其配套铟钢条码尺观测。二等水准线路在巢湖南岸的引江济巢菜子湖线、西兆河线以及明渠段交汇处设置结点,向南沿菜子湖线和西兆河线各布设一条水准线路,向北沿明渠至江淮沟通和江水北送段连通成水准线路。
二等水准采用单程往返观测,由于线路经过的淮河水面平均宽度超过350m,在此处采用三角高程跨河水准测量,在跨河处两岸建立A、B 和C、D 四个临时观测点,同岸之间的观测点高差采用水准观测,不同岸之间的高差使用全站仪三角高程观测。
三等水准采用单程双转点观测,两组转点尺承放置距离≥0.5m,高差不超过10cm,依次观测左、右路线。
2.2.3 外业数据处理和计算
水准测量外业观测数据,笔者基于VSTO 开发了水准测量数据处理系统进行处理和计算。
每一测段完成后,处理系统需要人工干预填入准确的起终点名、观测日期、气象元素,将仪器(天宝和徕卡水准仪)记录的文本文件转换为包含往返测(或左右路线)的水准观测手簿Excel 文件。通过读取水准线路文件夹下的所有测段观测手簿文件,根据所有测段点名自动生成线路的测段小结,并计算往返测不符值及其限差。然后读取线路的测段小结数据,形成外业高差和概略高程表。
外业高差和概略高程表引入所有水准点大地坐标和起终点高程后,进行各项改正数处理。根据需要,处理系统可人工选取并纳入相邻线路的测段小结文件,进行每千米水准测量偶然中误差的计算。
2.2.4 已知点稳定性及兼容性分析
以二等或三等水准往返观测已知水准点间高差进行检测,已知水准点检测结果见表4。
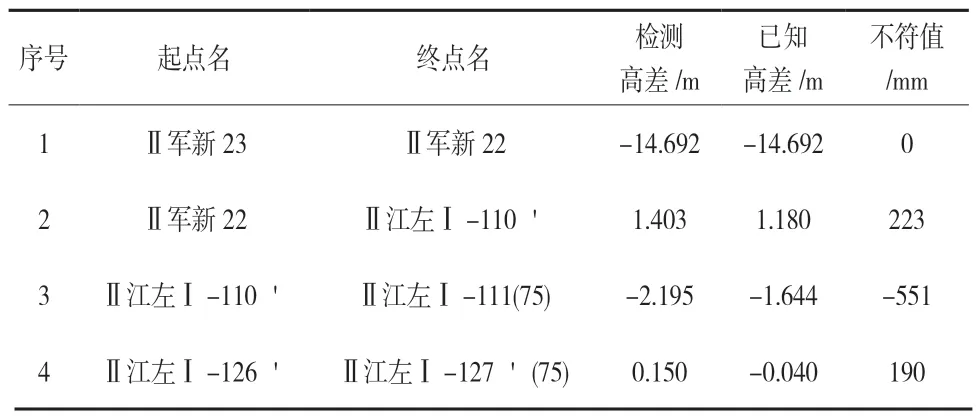
表4 已知水准点检测结果
根据检测结果分析,Ⅱ江左Ⅰ-110'、Ⅱ江左Ⅰ-111(75)、Ⅱ江左Ⅰ-127'(75)三点不稳定,Ⅱ六合12 与Ⅱ六合13-1 两点稳定,Ⅰ信怀75 与Ⅰ信怀76 两点稳定,Ⅰ信怀77(06)点稳定性较差,Ⅱ亳太8 与Ⅱ亳太11 两点较为稳定,Ⅱ亳太9 稳定性较差。
将经过改正后的水准线路观测高差与已知点按附合线路计算,高程系统兼容性分析结果见表5。
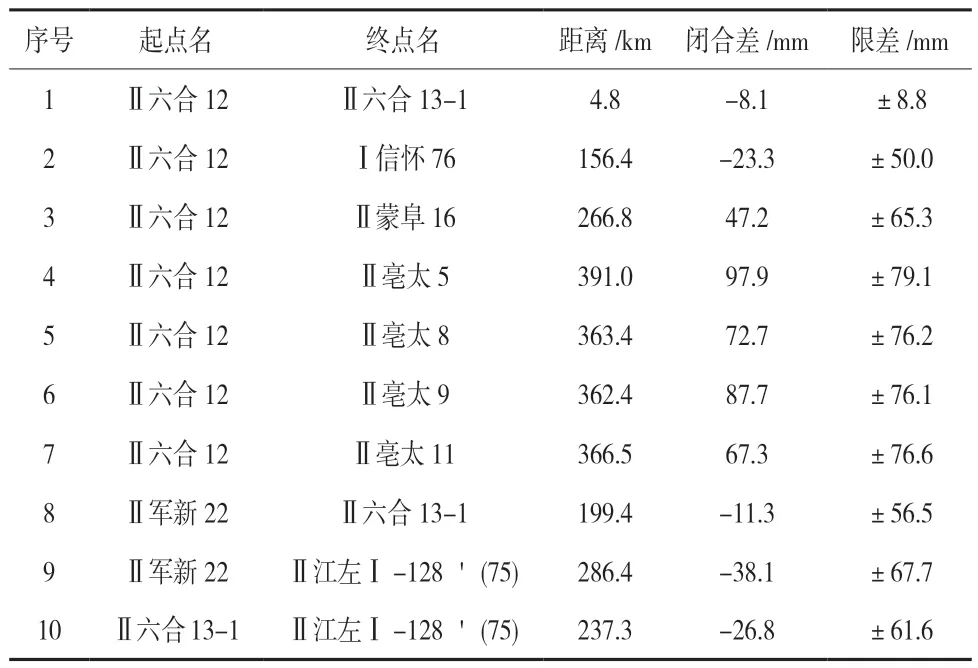
表5 已知水准点高程系统兼容性分析结果
根据计算结果分析,水准点亳太5 与其他水准点存在明显的系统兼容差。信怀线与六合线水准点系统吻合度较好,但是信怀线与阜蒙线、亳太线水准点均存在系统兼容差且超过线路限差,故二等水准网采用Ⅱ江左Ⅰ-128'(75)、军新22、六合13-1、六合12、阜蒙16 以及亳太11 作为起算点。
2.2.5 水准测量精度评定
二等水准测量194 个测段,往返测不符值最大为-7.54mm。不符值<1/3 限差的测段占总测段的79.4%,介于限差1/3~1/2 的测段占总测段18.0%,介于限差1/2~3/4 的测段占总测段的2.6%。每千米水准测量偶然中误差介于±0.52~±0.57mm,满足规范±1mm 要求。
三等水准测量382 个测段,左右路线不符值最大为12.2mm。不符值<1/3 限差的测段占总测段的95.5%,介于限差1/3~1/2 的测段占总测段0.5%。每千米水准测量偶然中误差介于±0.46~±0.63mm,满足规范±3mm 要求。
2.2.6 水准网平差
二等水准网长江西路以南有3 条附合线路,线路总长362km,平差后单位权中误差为1.6mm,最弱点高程中误差为11.7mm。长江西路以北有2 条附合线路和1 个闭合环,线路总长436km,平差后单位权中误差为2.2mm,最弱点高程中误差为17.7mm。
三等水准网长江西路以南有41 条附合线路,线路总长706km,平差后单位权中误差为 3.2mm,最弱点高程中误差为13.3mm。长江西路以北有50条附合线路,线路总长约774km,平差后单位权中误差为2.7mm,最弱点高程中误差为18.8mm。
3 结 语
引江济淮工程惠及安庆、芜湖、合肥、六安、淮南、阜阳和亳州7 个市,工程等级高,路线复杂,建筑物多,工程量大。安徽段控制网通过合理的技术方案设计,采用先进的测量技术、规范的作业程序以及严格的质量控制,无论是平面还是高程网,在观测数据质量合格前提下,通过联测已知点的比选,合理确立平差模型,从而获得质量优、精度高的结果数据。工程布设的平面和高程控制网,为工程建设、竣工验收和运行管理提供了基准统一的平面和高程成果,同时也为大型水利水电工程高等级控制网的建立积累了经验。
猜你喜欢
高技术通讯(2021年3期)2021-06-09
北京测绘(2021年1期)2021-02-05
科学(2020年5期)2020-11-26
防灾减灾学报(2020年3期)2020-09-25
水利规划与设计(2019年7期)2019-08-07
家庭影院技术(2018年11期)2019-01-21
地矿测绘(2016年4期)2017-01-05
舰船电子对抗(2016年5期)2016-12-13
铁道科学与工程学报(2016年5期)2016-06-24
航天器工程(2014年5期)2014-03-11
