
基于遗传算法的芦苇笋采收机模糊PID控制策略研究
2023-01-31 10:07张秋尧高自成贾国海刘怀粤刘姜毅
液压与气动 2023年1期
张秋尧,高自成,贾国海,刘怀粤,刘姜毅
(中南林业科技大学 机电工程学院,湖南 长沙 410000)
引言
芦苇笋是一种营养价值颇高的农业作物,作为食材在我国已有上千年的历史。对于芦苇笋的采收常采用人工掰断的方式,劳动成本较高,因此亟需推进芦苇笋采收的机械化和智能化。
模糊控制和PID控制在机械控制领域应用广泛且效果理想,结合遗传算法可以有效避免局部最小值等问题[1-5]。侯春杰等[6]和王婷婷等[7]利用遗传算法分别先后优化和同时优化无刷直流电机的模糊控制器的模糊规则和隶属度函数,结果表明均有较强的鲁棒性和自适应性;刘延飞等[8]提出了遗传算法的适应度增强淘汰法则和基因感染交叉方法,使得PID控制器的效率进一步提高;李璀璀等[9]利用遗传算法优化了模糊PID控制器的量化因子和比例因子,改善了电动舵机的动态和稳态性能。
目前,市场上还没有较为成熟的芦苇笋采收机械。廖凯等[10]研制的芦苇笋采收机填补了国内无芦苇笋采收机械的空白。这台芦苇笋采收机以机械配合液压系统进行传动,通过控制升举机构和采摘装置对芦苇笋完成采摘,但在遇到负载力矩变化的情况下,需要人工操作改变控制电压来使芦苇笋采收机输出相应的力矩。本研究通过分析芦苇笋采收机采摘装置的液压系统传动原理,对液压马达和电液比例流量控制阀进行数学建模,并确定了系统的输入参数为负载力矩和控制电压,输出参数为液压马达角速度;对于两输入单输出系统,状态空间方程比传递函数更加简洁高效,因此采用前者的形式在MATLAB/Simulink软件中对系统的数学模型进行仿真;采用通过遗传算法同时优化模糊规则和隶属度函数的模糊PID控制器实时控制电液比例流量控制阀的阀口开度,从而调整和稳定液压马达输出轴转速以应对外部负载力矩的变化,实现采摘装置同步带速度的智能调控。
1 系统原理
1.1 采摘装置工作原理
芦苇笋采摘机的采摘装置以液压马达进行驱动,液压马达的输出轴与同步带传动主动轴直接连接,通过多个齿轮并排相互啮合实现相邻两条同步带的正反转动,其结构如图1所示。其工作原理为通过采摘装置的一对同步带夹持住芦苇笋并产生向后牵引趋势,配合升举机构改变采摘装置的抬升高度和俯仰角度,将芦苇笋掰断进而完成采收工作。
在采收过程中,负载力矩的变化会影响液压马达的输入压力和输出转速,造成采摘装置工作不稳定,从而影响采收效率。因此需要通过液压马达输出角速度的实时反馈来调整液压系统控制器的输出电压,进而控制液压马达的入口流量以改变同步带传动轴的转速,使同步带速度保持稳定。
1.2 同步带及液压系统原理
为能够实时调节同步带在采收过程中的运行速度以应对负载的变化,利用传感器测量液压马达的输出转速,并将其电压信号输入到液压系统的电控制器。电控制器对预设电压和反馈电压进行处理运算后输出控制电压,通过改变电液比例流量控制阀的比例电磁铁的位移来调整阀口开度,改变液压马达转子转速,最终达到调节同步带运行速度的目的。
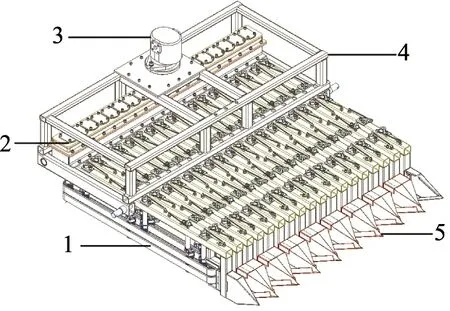
1.同步带夹持采摘避让机构 2.传动机构 3.液压马达 4.支撑架 5.分流板图1 芦苇笋采收机采摘装置结构示意图Fig.1 Structural diagram of picking device of reed shoot harvester
在采摘装置的液压系统中,使用单向液压泵和二位二通阀即可满足采摘工作中的同步带单向运转要求,其液压原理图如图2所示。在采收过程中,通过开关装置给换向阀通电调节其工作位置以切断卸荷回路,液压油通过电液比例二通流量控制阀流向液压马达的进油口,液压马达开始工作。
2 数学模型
2.1 液压马达模型
根据质量守恒定律可以得到液压马达的增量流量连续性方程:
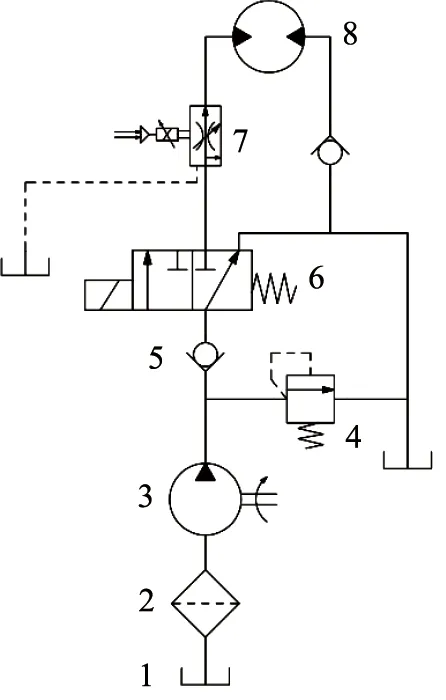
1.油箱 2.滤油器 3.单向液压泵 4.溢流阀 5.单向阀 6.电控二位二通阀 7.电液比例流量控制阀 8.液压马达图2 采摘装置液压系统原理图Fig.2 Schematic diagram of hydraulic system of picking device
(1)
式中,qm—— 液压马达流量
Vm—— 液压马达排量
ωm—— 液压马达转子角速度
λm—— 液压马达泄漏系数
pmi—— 液压马达输入压力
Vmi—— 液压马达进油腔容积
k—— 液压油体积模量
液压马达与同步带之间的增量式力矩平衡方程为:
(2)
式中,Jm—— 液压马达转轴和同步带主动轴的总转动惯量
c—— 液压马达与负载的黏性阻尼系数
G—— 负载的扭转弹簧刚度
θm—— 液压马达输出轴转角
T—— 同步带施加在液压马达输出轴上的负载力矩
2.2 电液比例流量控制阀模型
比例电磁铁的基尔霍夫增量式数学模型为:
(3)
式中,u—— 线圈电压
i—— 线圈电流
L—— 线圈电感
R—— 线圈绕阻
Ke—— 感应反电动势系数
x—— 阀芯位移
控制阀内的电磁铁的推力随着输入电压的增高而增大,在不考虑液压力的情况下,当电磁铁推力增长到与弹簧弹力、黏性力及惯性力之和相等时,阀芯停止移动,此时阀芯的力平衡公式为:
(4)
式中,Ki—— 电磁力系数
Ky—— 位移力系数与调零弹簧弹性系数之和
Ks—— 压缩弹簧弹性系数
B—— 阻尼系数
M—— 衔铁及阀芯质量和
通过流量控制阀的流量方程线性表达式为:
ΔqL=KqΔx-KcΔp
(5)
式中,qL—— 控制阀流量
p—— 控制阀压力
Kq—— 控制阀的流量增益
Kc—— 控制阀的流量-压力系数
2.3 液压系统状态方程
在液压系统中,控制电压Δu和负载力矩ΔT为输入变量;选取液压马达入口压力增量Δpmi、液压马达转子角速度增量dΔθm/dt、液压马达转子转角增量Δθm、比例电磁铁线圈电流增量Δi、阀芯位移速度增量dΔx/dt、阀芯位移增量Δx作为状态变量。整理式(1)~式(5)得出液压系统的线性方程组:
(6)
其中,输入变量为:
(7)
系统状态变量为:
(8)
输出变量为:
y=x6
(9)
整理以上方程组及变量,得出液压系统的状态方程和输出方程:
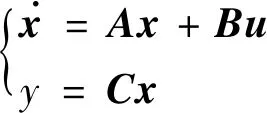
(10)
其中:

3 控制方法
3.1 模糊PID控制器
采摘装置液压系统中的电液比例流量控制阀的电控制器采用模糊PID控制器,由Mamdani模糊控制器和PID控制器组成。其反馈原理为:将液压马达输出轴转速的期望值和测量值之间的误差e和误差变化率ec输入模糊控制器,通过模糊控制器的隶属度函数和模糊规则作用后得到输出参数修正变化量ΔKP,ΔKI和ΔKD,再将3个参数变化量输入PID控制器运算后得到输出控制电压Δu,以调整电液比例流量控制阀阀口开度。
Kp,KI和KD参数整定原理如式(10)所示。
(11)
PID控制器控制规律的一般形式为:
(12)
(13)
KD=KPtD
(14)
式中,KP—— 比例参数
KI—— 积分参数
KD—— 微分参数
tI—— 积分时间
tD—— 微分时间
其离散形式为:
(15)
式中,u(k) —— PID控制器第k次输出电压
e(k) —— PID控制器第k次输入误差
3.2 遗传算法
遗传算法是模拟自然界生物在进化和繁殖过程中,对基因进行选择复制、交叉和变异操作的随机搜索算法[11],具有全局性搜索的特点,配合模糊PID控制器可以解决在运算过程中容易陷入局部最优解的问题。利用遗传算法同时对模糊控制器的模糊规则[12]和隶属度函数进行优化,寻找出最适合系统的隶属度函数和模糊规则,其控制原理如图3所示。
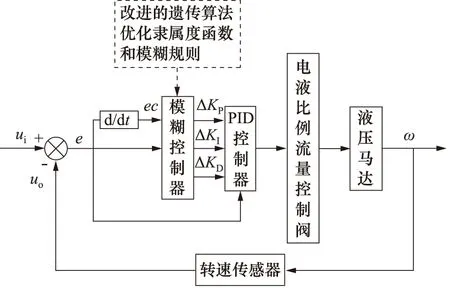
图3 遗传算法优化的模糊PID控制原理图Fig.3 Schematic diagram of fuzzy PID control optimized by genetic algorithm
利用遗传算法对模糊控制器的隶属度函数和模糊规则进行寻优包括如下过程:
1) 寻优参数编码
对模糊控制器输出参数和输出参数的隶属度函数设置模糊论域,并对输入参数e,ec和输出参数KP,KI和KD乘以适当的量化因子和比例因子对模糊控制器进行输入和输出。模糊集合选为{负大,负中,负小,零,正小,正中,正大},即{NB,NM,NS,ZO,PS,PM,PB}表示,以整实数[1,2,3,4,5,6,7]进行编码。在所有参数的隶属度函数中,模糊语言NB和PB分别采用Z形隶属度函数和S形隶属度函数,其他均采用三角隶属度函数;模糊语言NB和PB在隶属函数坐标系中的横坐标位置分别设为-3和3,此外需使用5位实数基因对NM,NS,ZO,PS,PM的横坐标进行编码以确定一个变量的隶属度函数,共需25位的基因确定5个变量的隶属度函数;3个输出变量的每个隶属度函数各对应49条模糊语言。将每个个体的隶属度函数和模糊规则编码在同一条染色体,因此每条染色体共含有172位基因。
2) 初始种群
随机生成一组规模一定、染色体长度为172的初始种群,经过一定次数的遗传迭代,最终获取适应度最高的个体。
为防止随机生成的浮点型隶属度函数编码在遗传过程中产生不合理结果,对模糊语言编码之间设置最小数值间隔。
3) 适应度函数
设置控制系统的目的为减小期望值和输出值之间的误差,因此将系统的目标函数最小值设为误差绝对值对时间的积分,同时为防止生成过大的控制能量和避免超调,分别将控制能量的平方、上升时间和超调量分别乘以适当的加权系数作为系统指标。
系统的目标函数与适应度函数应呈负相关,即目标函数越大,个体的适应度越小,因此适应度函数为:
(16)
4) 选择复制算子
在复制过程中,适应度大的个体将会替换掉适应度较小的相邻个体。选择复制算子采用适应度比例法——每个个体被选中复制的概率为其适应度值与种群适应度和之比,即:
(17)
式中,Pi—— 第i个个体被选中的概率
Fi—— 第i个个体的适应度值
m—— 种群规模
5) 交叉算子
每个个体的染色体上同时编入了隶属度函数和模糊规则,因此一对染色体在进行交叉过程中对应的两部分各自进行交叉。在交叉过程中以一定的交叉概率产生交叉点,若交叉点位于模糊规则片段,则在此片段内进行单点交叉操作;若交叉点位于隶属度函数片段,则在此片段内交叉点后的所有基因均进行算术交叉操作后四舍五入取整,算数交叉取整前的新个体基因为:
(18)
式中,xa和xb—— a和b个体基因

α—— 算数交叉系数
6) 变异算子
在遗传过程中每个个体会以一定的变异概率进行变异操作,若变异点位于模糊规则片段,则新个体的变异基因为在[1,2,3,4,5,6,7]内重新随机选取的1个整数;若变异点位于隶属度函数片段,则在对应的参数片段内重新生成1个与其他基因至少相差0.5且不重复的随机数,并以递增排序。
4 仿真与分析
设置遗传代数为100,种群规模为20,交叉概率为0.95,变异概率为0.05,系统采样时间为0.01 s。在MATLAB软件中运行程序,迭代完成后选出适应度最佳个体,其染色体模糊规则部分为{1762622,6226173,4346444,4654715,2316626,7216613,6425145,6335124,1546762,7156761,7512666,7341514,3563527,7676753,7374355,3243552,2634344,2426265,4432365,7465623,4554445},隶属度函数部分为{-2.5 -1 -0.5 1.5 2,-2 -1 -0.5 0 1,-2.5 -2 -1.5 -0.5 1,-2.5 -1.5 0 0.5 2.5,-1.5 -1 -0.5 0 1}。对染色体进行解码获得对应的模糊规则如表1所示,由上到下依次对应参数ΔKP,ΔKI和ΔKD,解码后的隶属度函数如图4所示。
为验证遗传算法优化模糊规则和隶属度函数的模糊PID控制器的性能,在Simulink软件中分别搭建了PID控制器、模糊PID控制器和遗传算法优化的模糊PID控制器模块以进行比较,其中遗传算法优化的模糊PID控制器Simulink仿真模块如图5所示。
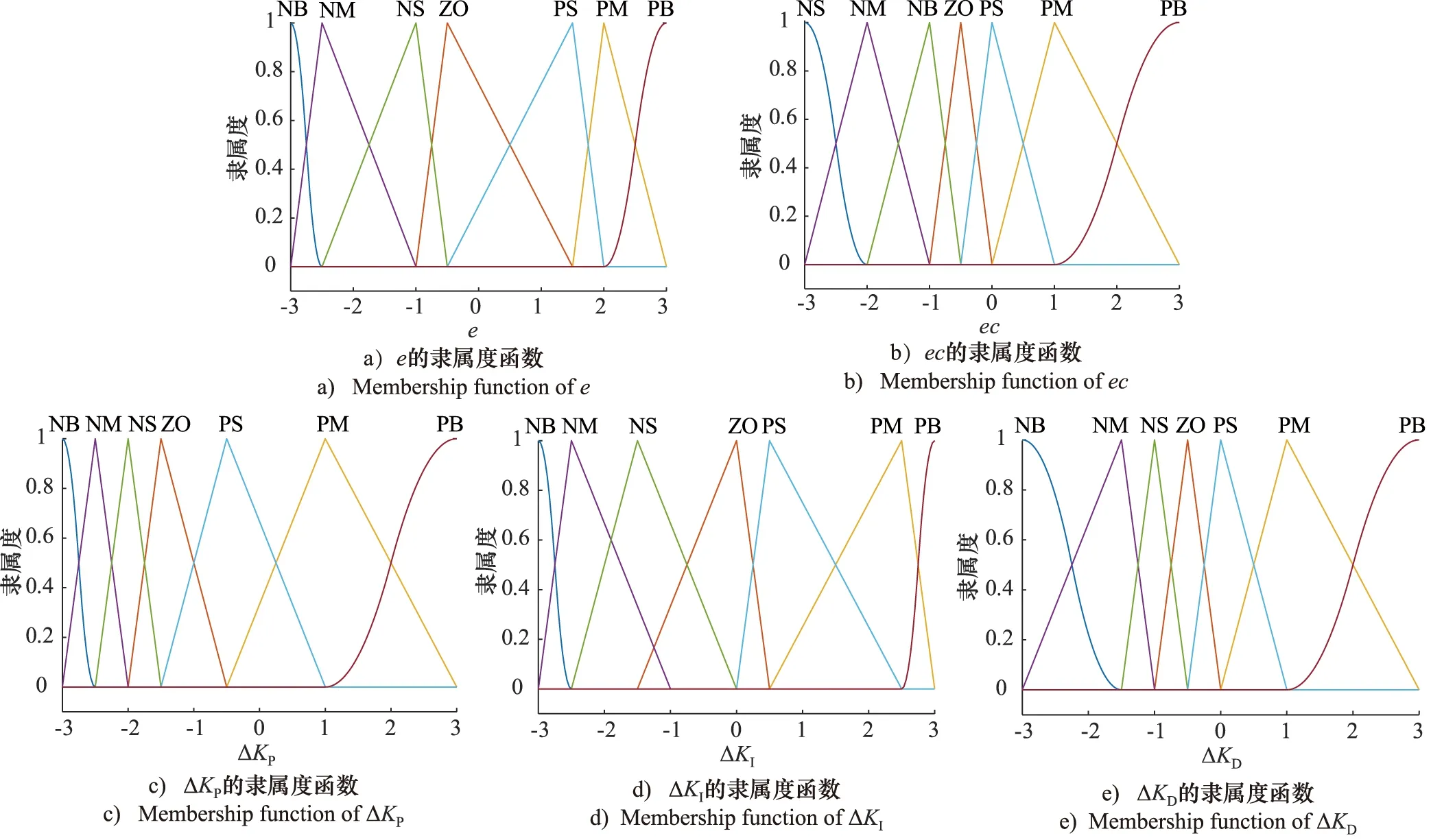
图4 遗传算法优化后模糊控制器隶属度函数Fig.4 Membership function of fuzzy controller optimized by genetic algorithm
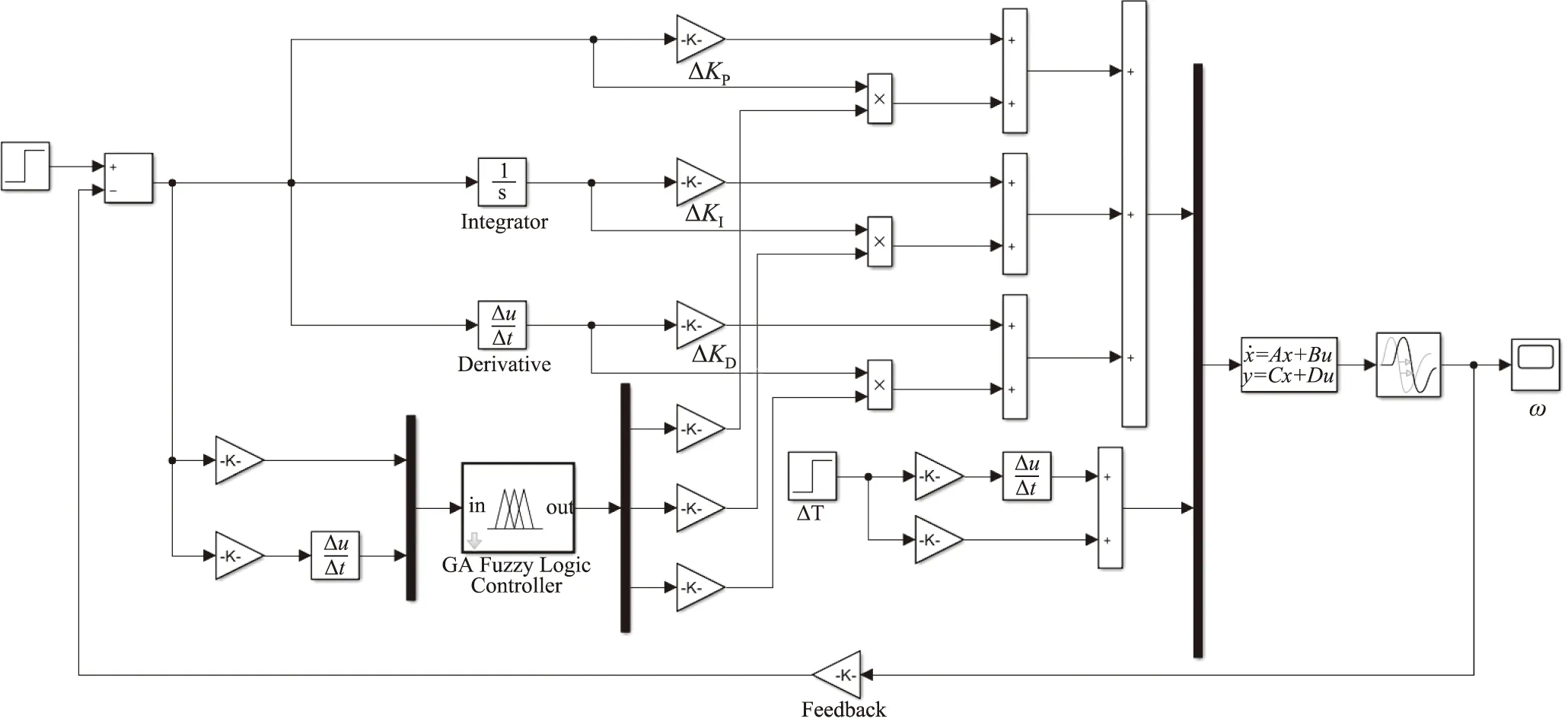
图5 GA Fuzzy PID Simulink仿真模块Fig.5 GA Fuzzy PID Simulink simulation module
由阶跃响应曲线可知,普通PID控制器的响应曲线震荡较为明显,性能较差,最大超调量为11.8%,达到稳态所需时间为1.02 s;模糊PID控制器的响应较为稳定,无超调和震荡,达到稳态耗时0.84 s;采用遗传算法优化的模糊PID控制器响应较快且无超调,在0.73 s时达到稳态,无震荡。

图6 无负载情况下控制器阶跃响应曲线Fig.6 Step response curve of controller under no load
为验证采用遗传算法优化的模糊PID控制器在外界干扰下的稳定性,在1.5 s时刻接入40 N·m的负载力矩,得到不同控制器在干扰情况下的阶跃响应曲线,如图7所示。
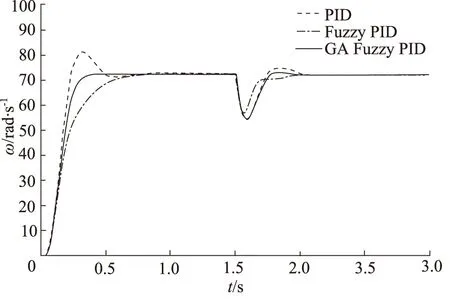
图7 有负载情况下控制器阶跃响应曲线Fig.7 Step response curve of controller under load
由有载情况下的响应曲线可知,普通PID控制器在受到力矩干扰后会产生较大震荡,转速最大下降17.66 rad/s,收敛过程中产生3.0%的最大超调量,经历0.86 s后回到稳态;模糊PID控制器在受到干扰后产生了较小震荡,转速最大下降13.78 rad/s,收敛过程中产生轻微波动且无超调,回到稳态所需时间为0.72 s;采用遗传算法优化的模糊PID控制器受到干扰产生震荡后迅速回到收敛值,收敛过程中基本无波动和超调,最大转速下降17.82 rad/s,经历0.71 s回到稳态。
综上所述,普通PID控制器在响应阶跃信号时达到稳态时间较长,超调较大,鲁棒性较差;模糊PID控制器作出响应时上升平稳但时间较长;采用遗传算法优化的模糊PID控制器在受到信号时能够迅速达到收敛且不产生超调,上升时间短,且在受到干扰后能及时恢复稳定,抗干扰能力和鲁棒性较强,能够为芦苇笋采收机在采摘过程中受到的力矩变化及时做出调整,很好的满足降低人工操作难度,提高采收效率的要求。
5 结论
为降低芦苇笋采收机的人工操作难度,提高采收效率,提出了一种基于遗传算法优化模糊规则和隶属度函数的模糊PID控制器来控制芦苇笋采收机采摘装置,以自动调整控制电压使液压马达提供相应的转速。
通过改进遗传算法的复制和交叉操作使得在同一条染色体上的隶属度函数和模糊规则同时遗传和优化,最后通过解码得到适应于芦苇笋采收机液压系统的模糊规则和隶属度函数。
利用遗传算法优化后的模糊PID控制器对液压系统的状态方程在Simulink中进行仿真,验证控制器在有负载和无负载工况下的可行性。结果表明,采用遗传算法优化的模糊PID控制器比普通PID控制器和模糊PID控制器有着更块的响应速度、更好的鲁棒性和抗干扰性,能够满足芦苇笋采收机的工作需求。
猜你喜欢
重庆理工大学学报(自然科学)(2022年2期)2022-03-23
长春大学学报(2021年4期)2021-05-17
制造技术与机床(2017年3期)2017-06-23
小学生导刊(2017年15期)2017-05-17
中国质量与标准导报(2016年10期)2016-11-29
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
工业设计(2016年7期)2016-05-04
工程建设与设计(2016年4期)2016-02-27
中国设备工程(2011年11期)2011-10-21
