具有Bazykin功能反应的捕食者-食饵扩散模型的稳定性
2023-01-13 13:34赵明阳孙福芹刘朋燕
天津职业技术师范大学学报 2022年4期
赵明阳,孙福芹,刘朋燕
(天津职业技术师范大学理学院,天津 300222)
众所周知,生态系统能够反映物种与物种间、物种与自然环境间的相互作用,捕食者-食饵模型作为一类经典的生态系统模型,可以用来研究2个物种之间的动态相互作用,对于维护生态系统中物种的稳定性具有重要意义。在此基础上,众多学者深入分析捕食者-食饵相互作用的特征,构建了带有多种功能性反应函数的捕食者-食饵模型,包括Holling I-III功能反应、Holling-Tanner功能反应、Beddington-Deangelis功能反应以及Ratio-dependent功能反应等[1-4]。然而,在对捕食者-食饵模型的研究中,鲜有文献考察Bazykin功能反应函数。Bazykin功能反应可以描述捕食者饱和的不稳定力量与猎物竞争的稳定力量,这对于了解种群之间的作用更具实际意义。另外,现实世界中的猎物和捕食者总是处于运动状态,为准确模拟猎物和捕食者的动态特征,需要在模型中考虑种群的空间扩散[5-8]。因此,本文构建一个具有Bazykin功能反应的捕食者-食饵扩散模型,研究模型的有界性和平衡点的存在性,并对平衡点的局部稳定性、全局稳定性以及Turing不稳定性进行分析。
1 模型组成和初步结果
1.1 模型组成
考虑了一个具有Bazykin功能反应的捕食者-食饵扩散模型[9]如下
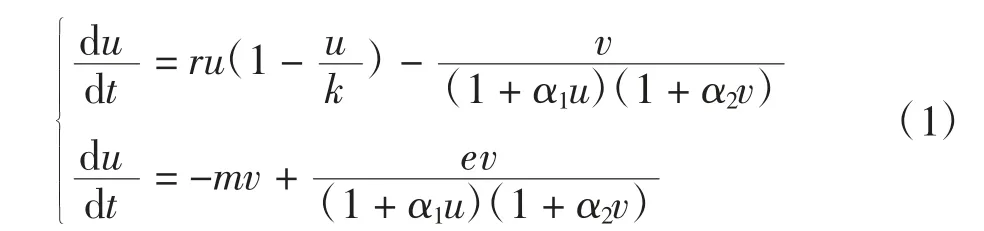
式中:u(t)为t时刻食饵种群的数量;v(t)为t时刻捕食者种群的数量;增长率r∈R+;环境承载力k∈R+;e为食饵到捕食者的转化率(0<e<1);m为捕食者的恒定自然死亡率。
Bazykin型功能性反应函数为f(u,v)=1/(1+α1u)·(1+α2v)。其中,α1和α2为2个正常数,且α1>α2,用来描述捕食者饱和的破坏稳定力和争夺猎物的稳定力。
在现实世界中,猎物和捕食者始终处于运动状态,该现象可以利用自扩散来模拟。假设所考虑的2个种群总是在运动,每一个种群都遵循1条路径,路径的长度用x表示。考虑以上假设,模型(1)可以写为如下形式
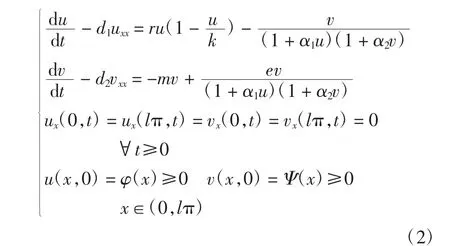
式中:d1、d2分别为食饵和捕食者的扩散率;x为捕食者或食饵在时刻t所在的位置;lπ为所在区域的范围。Neuman边界条件表示食饵和捕食者的移动距离为0~lπ。以上所有参数均为非负[10]。
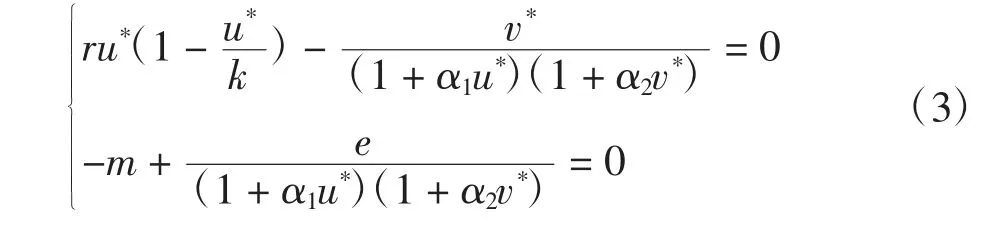
1.2 平衡点的存在性
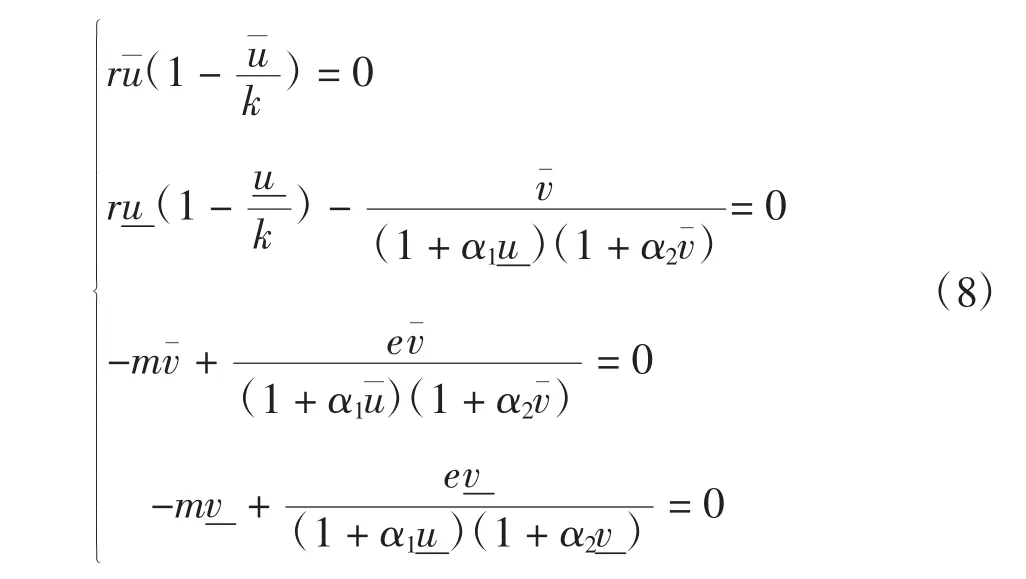
通过求解du/dt=0,dv/dt=0可以得到模型(2)的平衡点,显然,模型(2)有平衡点E0(0,0),E1(k,0)以及E2(u*,v*)。u*、v*可根据方程组(3)求解得出
1.3 有界性
下面给出问题(2)解的有界性结论。
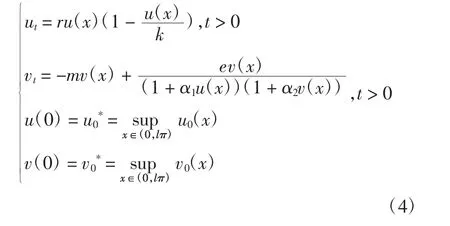
定理1当u0(x)≥0,v0(x)≥0且不恒等于0时,系统(2)有唯一解(u(x),v(x));当t>0,x∈(0,lπ)时,0<u(x,t)<u*(t)且0<v(x,t)<v*(t)。其中,(u*(t),v*(t))为常微分方程(4)的唯一解
进一步可以得到

证明令
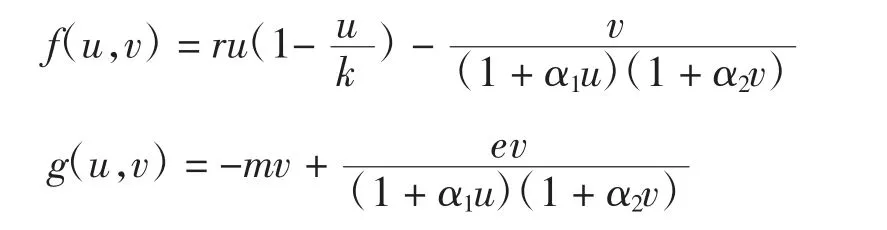
f和g的偏导数为

因此,f和g为Lipschitz函数,故存在正数c1、c2对于u1、u2、v1、v2有

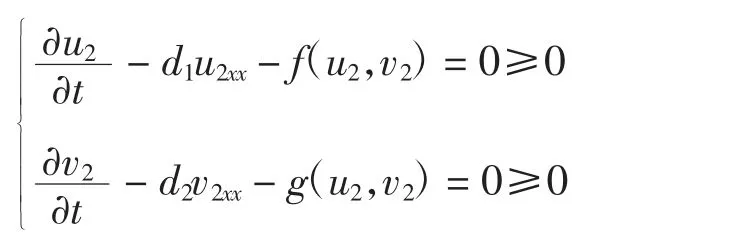
令(u2(x,t),v2(x,t))=(u*(t),v*(t)),满足方程
令u1(x,t),v1(x,t)=(0,0)满足方程

其中,0≤u0(x)≤u0*,0≤v0(x)≤v0*,则(u1(x,t),v1(x,t)),(u2(x,t),v2(x,t))分别为系统(2)的上解和下解。强极大值原理表明,当t>0且x∈(0,lπ)时,u(x,t)>0,v(x,t)>0。至此,完成了第一部分的证明。
u(x,t)≤u*(t),v(x,t)≤v*(t),u*(t)为方程ut=ru(x)(1-u(x)/k)的唯一解,且u(0)=u0*>0。容易证明当t→+∞时,u*(t)→k。所以,对于∀ε>0,∃T0>0使得u(x,t)≤k+ε。从而得到,当t>T0,x∈(0,lπ)时,sup u(x,t)=k。
令
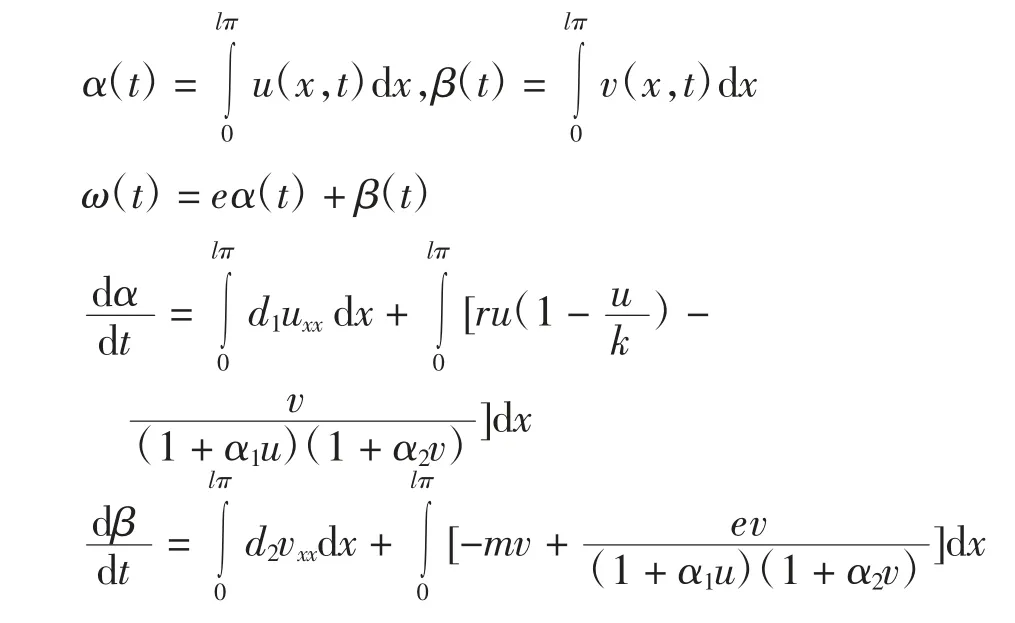
根据Neumann边界条件
可以得到


得到

2 稳定性分析
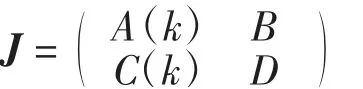
系统(2)在任意点(u,v)处的Jacobian矩阵为J=(mij)∈R2×2,
D=diag(d1+d2)及其对应带有Neumann边界条件的实值Sobolev空间可定义为

其内积为

相关χ的Hilbertian范数记为‖·‖2.2,相关的特征值问题为

其中,kn=(n/l)2和cos(nx/l),n=1,2,3…分别为式(7)的特征值和特征函数。
2.1 E1(k,0)的局部稳定性
平衡点E1(k,0)的线性化系统为Ut=DΔU+J(k,0)·U,矩阵-(n/l)2D+J(k,0)的特征值为

定理2当R1=m+e/(1+α1k)<0时,系统(2)在平衡点E1(k,0)处是局部渐近稳定的。
2.2 E1(k,0)的全局稳定性
分别定义系统(2)的上常数解和下解(u1,v1)=(k+ε,M)和(u2,v2)=(ε,0)。其中,ε、M为正常数且ε足够小;定义()和(),m=1,2,3…为耦合抛物型方程[11]
和

根据Pao[11]的定理2.1

运用比较定理证明方程u(x,t)≤γ(x,t),(x,t)∈[0,lπ]×[0,+∞],通过下面的抛物方程

得到t→+∞时,γ(x,t)→k,在[0,lπ]×[t0,+∞]中,存在t0>0时,u(x,t)≤k+ε,这意味着平衡点E1全局吸引,并且定理2证明了在满足特定条件的情况下,E1局部渐近稳定,因此能够得到E1全局稳定。
2.3 E2(u*,v*)的Turing不稳定性
系统(2)在正平衡点(u*,v*)处的雅可比矩阵为
系统(2)写成如下形式

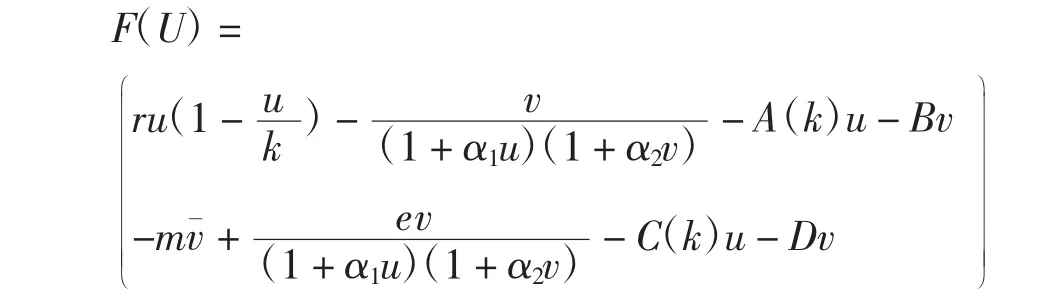
F(U)是围绕平衡点E2(u*,v*)的非线性函数。
系统(2)在E2(u*,v*)处的线性化系统为:Ut=DΔU+J(u*,v*)U-(n/l)2D+J(u*,v*)。其中,-(n/l)2D+J(u*,v*)的矩阵为
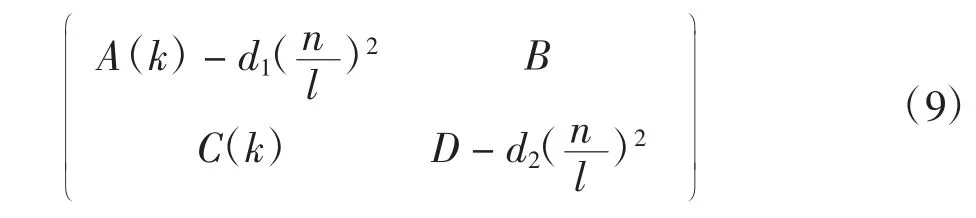
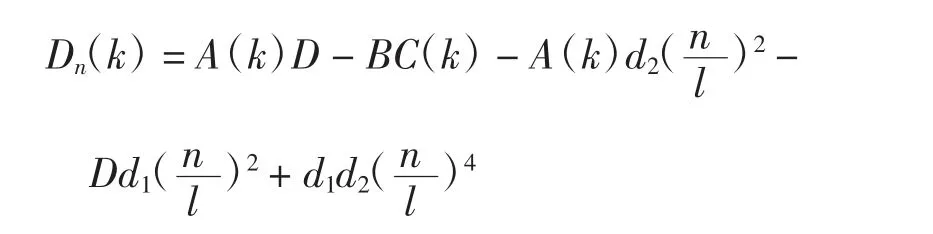
矩阵(9)的特征值为方程(10)的解

Turing不稳定性的存在需要满足以下2个方面[12]:
(i)当没有扩散时,平衡点是线性稳定的,D0(k)>0;
(ii)在扩散存在时,平衡点变得不稳定,Dn(k)<0。
由于
所以
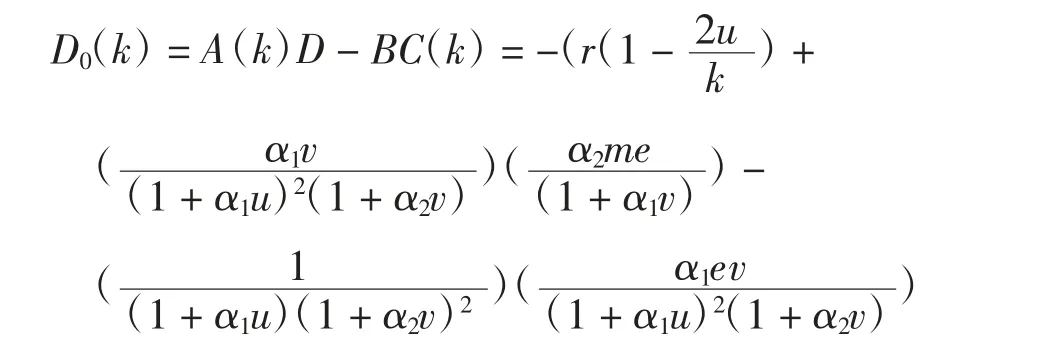
显然D0(k)<0,由此可以得到Turing不稳定性的不存在性。
3 结语
本文考虑了齐次Neumann边界条件下,具有Bazykin功能反应的捕食者-食饵扩散模型。首先,证明了模型的有界性和平衡点的存在性,得到模型的3个平衡点E0、E1、E2;其次,证明了在没有E2的情况下,E1的局部稳定性以及全局稳定性;最后,通过对平衡点E2(u*,v*)的特征方程进行分析,证明Turing不稳定性的不存在性。通过分析具有Bazykin功能反应函数的捕食者-食饵扩散模型的稳定性,有助于未来对具有Bazykin功能反应函数模型的分支问题进行更深一步的研究。
猜你喜欢
南华大学学报(自然科学版)(2022年5期)2023-01-10
数学物理学报(2022年5期)2022-10-09
延边大学学报(自然科学版)(2022年2期)2022-09-13
六盘水师范学院学报(2021年6期)2022-01-09
百科探秘·海底世界(2020年11期)2020-12-31
数学大世界(2020年23期)2020-09-14
动漫星空(兴趣英语)(2018年4期)2018-10-30
传媒评论(2018年7期)2018-09-18
上海师范大学学报·自然科学版(2018年3期)2018-05-14
中外文摘(2016年13期)2016-08-29