
智能网联汽车混合交通流稳定性与路段基本图分析
2023-01-06 08:25蒋阳升郝慧君姚志洪
工业工程 2022年6期
蒋阳升,郝慧君,姚志洪
(西南交通大学 1.交通运输与物流学院;2.综合交通大数据应用技术国家工程实验室;3.综合交通运输智能化国家地方联合工程实验室,四川 成都 611756)
随着自动驾驶领域和无线通讯技术的日趋成熟,我国对于智能网联汽车的研发越来越重视[1-4]。相关研究[4]表明,在未来的5年内,道路上约有10%的车辆为智能网联汽车,而在未来的30年内,该比例会上升至75%。所以未来的很长一段时间会呈现人工驾驶汽车(human-driven vehicles,HDVs) 与智能网联汽车(connected and automated vehicles,CAVs)共存的现象。因此,研究由人工驾驶汽车和智能网联汽车组成的混合交通流特性具有重要的意义。
国内外学者对混有智能网联汽车混合交通流特性的研究主要涉及到稳定性和基本图方面。在稳定性方面,Ma等[5]考虑未来年份的自动驾驶汽车不同渗透率(51%和91%) 的情况,研究结果表明自动驾驶汽车比例的提高不仅可以提升交通流量,还可提高交通流稳定性,但该研究仅考虑两种不同的CAV渗透率,未考虑其他渗透率对研究结果的影响。Alireza等[6]利用不同的跟驰模型和合理的假设来模拟不同类型的车辆具有不同的通信能力,在不同CAV渗透率下对交通流稳定性进行了研究,结果表明智能网联汽车渗透率的提高可以提升交通流量并减少冲击波的产生。Zheng等[7]提出6个性能指标以衡量智能网联汽车对混合交通系统的不确定性和稳定性的影响,得出智能网联汽车渗透率从5%增加到50%的过程中可以显著减少交通拥堵,提高混合交通系统在自由流和拥堵情况下的稳定性。Kesting等[8]对智能驾驶员模型(intelligent driven model,IDM)的相关参数进行延伸,得到自适应巡航模型,对匝道上交通通行能力进行仿真研究,仿真结果表明,CAV的渗透率达到25%时,交通拥堵可得到一定改善,通行能力有所提高。但上述研究均未考虑当CAV跟驰HDV时,由于前车缺乏相关通讯设施,两车之间无法形成车-车通讯,所以此时后车可被看作是功能不完全的CAV,即产生了CAV退化的现象。为研究这一问题,Minanes等[9]提出的PATH实车实验论证了CAV退化前相对于退化后而言,具有更高的稳定性。Shladover等[10]考虑不同跟驰状态下CAV的退化现象,并对高速公路的道路通行情况进行仿真模拟。在混合交通流的基本图方面。Yao等[11]描述了HDV和CAV的跟车驾驶行为,得到不同CAV渗透率下的混合交通流基本图模型,但其未考虑智能网联汽车的退化行为。为解决该问题,秦严严等[12]考虑CAV的退化,运用ACC模型和CACC模型分别作为智能网联汽车退化前后的跟驰模型,得出不同智能网联汽车渗透率下的混合交通流基本图模型。常鑫等[13]建立混合交通流中不同类型车辆的跟驰模型,推导了混有智能网联汽车车队的交通流基本图模型,并对模型参数渗透率和最大车队规模的敏感性进行了分析。
通过分析可知,现有研究存在以下不足之处。1) 现有研究大多运用不同的模型来描述不同车辆的跟驰行为特性,由于模型之间存在较大的差异,在现实中会对人工驾驶车辆造成影响。且有研究[14]表明,跟驰行为更加接近人类驾驶员能够提高交通流的稳定性,因此可采用同一模型来描述车辆间的跟驰行为。2) 现有研究对混合交通流特性研究不够全面,未同时从稳定性和基本图两方面对混合交通流特性进行深入的研究。综上所述,本文采用应用广泛的IDM模型来描述不同车辆的跟驰行为,考虑智能网联车的退化,以不同的参数来表征不同车辆的差异;在此基础上,通过推导交通流的稳定性条件和基本图模型,全面深入地研究智能网联汽车对于混合交通流特性的影响。最后,运用SUMO软件设计仿真实验,并基于数据分析验证本文研究的可靠性和有效性。
1 混合交通流车辆跟驰行为分析
1.1 跟驰模式
若一条道路上的车辆由智能网联汽车和人工驾驶汽车组成,设CAV渗透率为p,则HDV占比为(1-p)。根据车辆之间的前后位置关系容易得出,由智能网联汽车(CAVs) 和人工驾驶汽车(HDVs)组成的混合交通流中车辆间共存在4种跟驰模式。
1) HDV跟驰HDV。
当前后车辆均为人工驾驶汽车时,当前车的驾驶行为或速度突然变动时,后车需要一定反应时间来作出判断,再对自己的驾驶行为作出相应的调整。由于HDV占比为1-p,理论上,此种跟驰模式所占比例为P1。

2) HDV跟驰CAV。
当前车为智能网联汽车,后车是人工驾驶汽车时。与式(1) 类似,当前车的状态变动时,后车仍然需要一定的反应时间来进行调整。因此,本质与第1种的跟驰模式情况一样。这种跟驰模式所占比例为P2。

3) CAV跟驰HDV。
当前车是人工驾驶汽车,后车是智能网联汽车时,由于后车配有相关的感知设备(如摄像头、激光雷达等),当前车突然加减速时,后车的车载传感器会对其行为的变化进行准确的捕捉,再快速作出决策。与式(1) 和式(2) 相比,其期望车头时距更短。这种跟驰模式所占比例为P3。

4) CAV跟驰CAV。
当前后车均为智能网联汽车时,两车可实时实地共享道路信息和驾驶行为决策,实现“车-车通信”。例如,前车要作出加减速的决策时,后车能同时接收到此信息,从而立即作出相应的决策。在这种跟驰模式中,前后车可作为一个整体,车辆之间的期望车头时距更短。分析可知,该跟驰模式所占比例为P4。

1.2 跟驰模型
相关学者对不同自动化程度的车辆提出了不同的跟驰模型,例如描述人工车辆驾驶行为的智能驾驶员模型(intelligent driven model,IDM)[15]和全速度差模型(full velocity difference model,FVD)[16],以及描述CAV跟驰行为的协同自适应巡航控制模型(connected adaptive cruise control,CACC)[16]和自适应巡航控制车辆模型(adaptive cruise control,ACC)[17]等。其中,Treiber等[15]提出的IDM模型能够准确反映车辆的跟驰特性,已被广泛地用来描述人工驾驶汽车和自动驾驶车辆的跟驰行为[18-19]。因此,本文运用智能驾驶员模型来表征1.1节所提及4种不同跟驰模式。其中,IDM模型[15]的公式如式(5) 所示。

式中参数含义如表1所示。
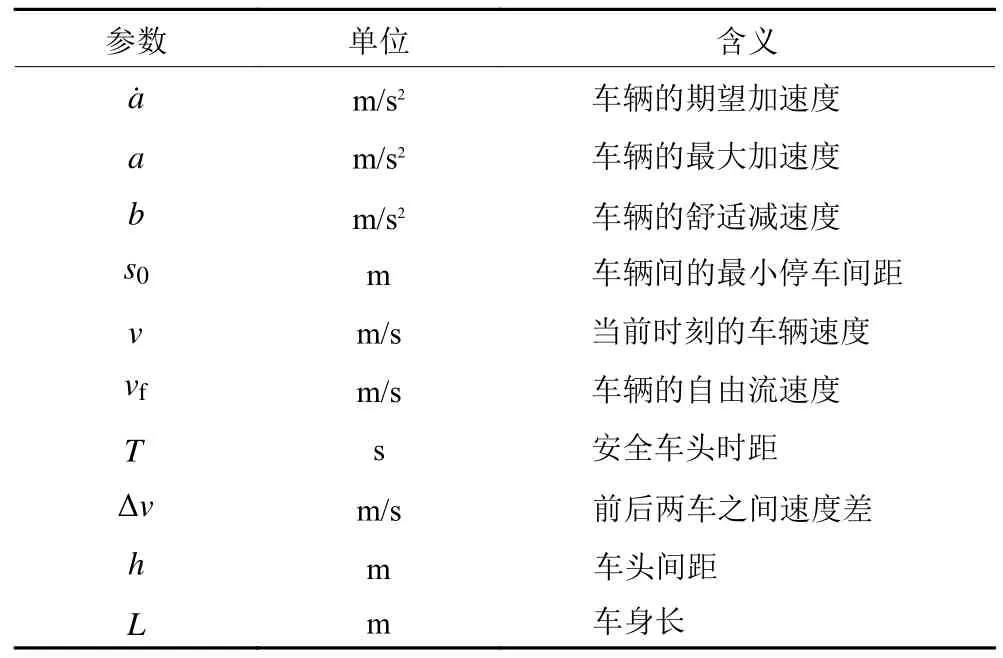
表1 IDM模型参数Table 1 Parameters of IDM
1.3 模型参数
如1.1节所述,当后车是人工驾驶汽车时,对前车的驾驶行为变动需要一段反应时间,需要与前车保持相对较大的距离,此时后车期望车头时距较大。当后方车是智能网联汽车时,该车所需要的期望车头时距较短。而当前后车均为智能网联汽车时,后车所需的期望车头时距最短。根据所跟驰车辆的不同情况,参考文献[20],设定不同跟驰模式下的IDM模型参数,如表2所示。

表2 模型参数取值Table 2 Parameter value
2 混合交通流稳定性与基本图模型
2.1 车辆构成分析
在1.1节描述的第4) 种跟驰模型,即前后方车辆都为CAV的情况下,两车之间可以进行车-车通讯实现实时联动,此时后方车辆为功能完全的CAV。但在第3) 种跟驰模式下,即智能网联汽车跟随人工驾驶汽车时,由于人工驾驶汽车未配备车-车通信设备,后方的CAV无法与前车进行通讯,此时的CAV只能作为退化形成的DCAV(Degraded-CAV)运行,即可以通过前车的行为变化及时进行自我调整,但无法进行实时的通讯交互,如图1所示。

图1 智能网联车退化示意Figure 1 Degradation of connected automated vehicles
由上文可知,当智能网联车的渗透率为p时,不同车辆数量占比如表3所示。用N代表车流中所含车辆总数,NHDV、NDCAV、NCAV分别代表HDV、DCAV、CAV的数量。可得,NHDV=N(1-p);NDCAV=Np(1-p);NCAV=Np2。
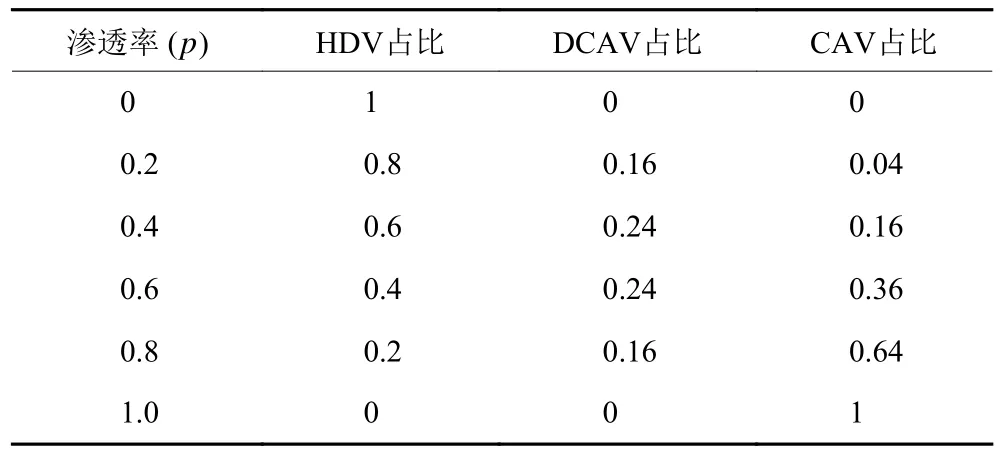
表3 不同渗透率下不同车辆占比Table 3 Proportion of different vehicles under different penetration rates
2.2 稳定性分析
交通流的稳定性是判断交通流受到的扰动对于其状态影响情况的重要根据。车队在道路上实际运行时会受到不同程度的干扰。其中,一些程度较轻的干扰可能会随着时间的推移而逐渐消失,从而不会对交通流状态造成太大的影响。为了对混入智能网联汽车的混合交通流抵抗扰动的能力进行探讨,本文进行了相关的稳定性分析。
Ward[21]提出的混合交通流稳定性的判别式如式(6) 所示。

式中,fv、fΔv和fh分别表示跟驰模型对车辆速度、前后车速度差、车头间距求一阶偏导,具体公式如下。

当交通流稳定时,车辆的速度差可看作是0。令式(5) 中的 Δv为0,fv、fΔv和fh分别表示车辆的期望加速度a˙对车辆速度v、前后车速度差 Δv和车头间距h的一阶偏导。则

混合交通流达成稳定的条件为[12]

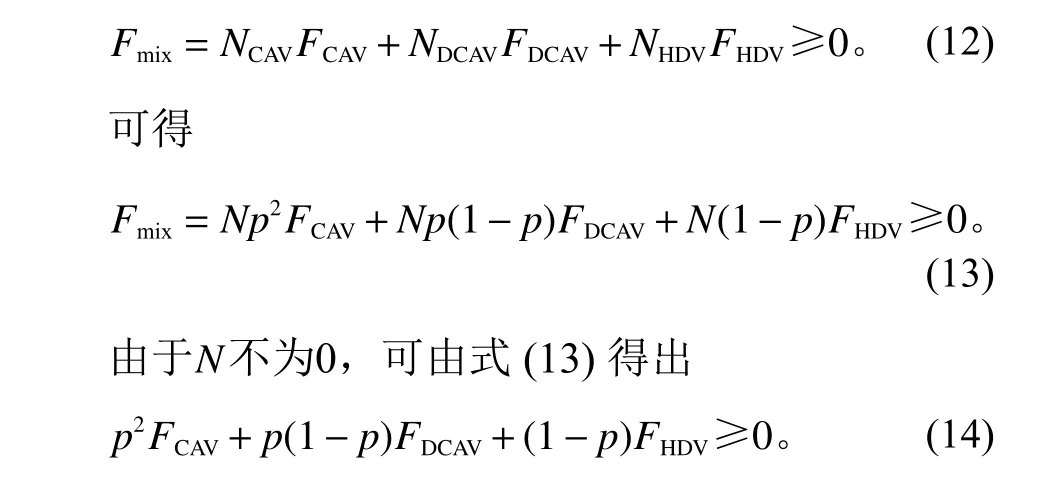
式中,i、j为车辆的编号;为第i辆车的控制公式关于车辆速度v、速度差 Δv与车头间距h的偏微分项。令FCAV、FDCAV、FHDV为功能完全的CAV、退化形成的DCAV和HDV的稳定性判别值,得到3种类型车辆的稳定性判别值。

令混合交通流稳定性判别值为Fmix。

则式(11) 可简化为
基于上述公式得到在不同车流速度、不同CAV渗透率下的交通流稳定性判别值,如图2所示。

图2 混合交通流稳定性判别值热力图Figure 2 Heat map of the stability discriminant value of mixed traffic flow
图2为混合交通流稳定性判别值热力图,其中,黑色轮廓曲线表示混合交通流稳定性判别值Fmix=0的阈值曲线。由图2可得如下结论。1) 黑色曲线外部代表稳定性判别值恒为正,即交通流在曲线外部的渗透率和速度值下一直保持稳定;同理,曲线内部对应的交通流稳定性判别值恒为负,交通流恒处于不稳定状态。2) 由Fmix=0曲线与x轴交点得知,在渗透率为0的状态下,交通流保持稳定的临界速度值,为0.61 m/s和21.53 m/s,与全人工驾驶车辆组成的同质交通流速度阈值一致。3)Fmix=0曲线的最高点为(9.53,0.756),即当渗透率大于75.6%时,无论速度怎样变化,混合交通流一直处于稳定状态。4) 当p增大时,混合交通流不稳定的速度区间逐渐缩小,因此,混合交通流中智能网联汽车的渗透率上升有利于改善混合交通流的稳定性。
2.3 参数敏感性分析
在2.2节给出的稳定性判别值公式中,计算了包含HDV、DCAV、CAV的混合车流的稳定值。当稳定值不为负时,即判断混合车流在此速度下达到稳定状态。在混合车流中,设定3种车辆的自由流速度都为33.3 m/s,可认定混合车流的自由流速度即为33.3 m/s。保持其他参数不变,仅改变自由流速度的取值,使其分别为15、20、25、30 m/s。所对应的混合流速度—稳定值曲线如图3所示。
从图3中可看出,随着混合车流的自由流速度增大,相同速度和相同渗透率下的稳定值会随之减小。以v=10 m/s,p=60%为例,当自由流速度vf为15 m/s、20 m/s、25 m/s、30 m/s时,混合流稳定值分别为2.48、0.22、-0.19、-0.32。

图3 vf敏感度分析结果Figure 3 Sensitivity analysis result of vf
2.4 基本图模型
由文献[21]可知,当交通流趋于稳定时,前后车辆速度差和速度微分值均为0。因此,令式(5) 中Δv和为0,可以算出4种跟驰模型下的稳定车头间距为

其中,i=1,2,3,4。h1表示HDV跟随HDV时的稳定车头间距;h2表示HDV跟随CAV时的稳定车头间距(由1.1节中对于跟驰模式的分析可知h1=h2) ;h3、h4分别表示CAV跟随HDV和CAV跟随CAV两种情况下的稳定车头间距。4种跟驰模型下h的平均值可看作混合交通流的稳定车头间距,为

式中,H代表混合交通流的车头间距。结合表2的数据可得

由交通流密度与车头间距的关系可得车流密度
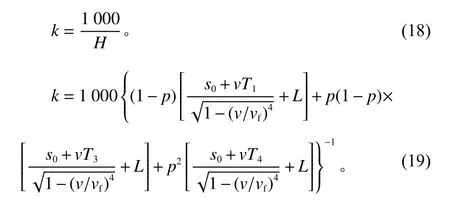
由交通流流量、密度和速度的关系式可知交通流流量为

根据式(19) 和(20),基于Matlab平台,在高速公路基本路段上对不同智能网联汽车渗透率下的混合交通流进行仿真,得到交通流流量、密度以及速度的关系曲线,如图4所示。仿真参数同表1。
分析图4可知,当智能网联车的渗透率为100%时,交通流流量可达到的最大值为2 519 辆/h,此时对应的车辆速度为20 m/s,对应的交通流密度为36.98 辆/km。且随着智能网联汽车比例的增大,混合交通流可在相同的速度区间内获得更大的交通流密度和交通流流量,说明智能网联车的渗透率能够提高道路交通通行能力。

图4 混合交通流流量、速度和密度关系图Figure 4 Flow,speed and density relationship diagram of mixed traffic flow
3 仿真验证
3.1 仿真环境设置
本节设计了仿真实验来验证本文的基本图模型,具体为在SUMO软件构建混合交通流仿真环境,利用软件收集交通流流量、密度和速度数据。其中,仿真路段设计为十段长度为1 km的单车道连接而成的正十边形环路,如图5所示。

图5 仿真路段图Figure 5 Simulation road map
不考虑车辆换道行为,按照模型参数设置混合交通流中不同类型车辆的跟驰模型参数,根据表2得到不同智能网联汽车的渗透率下的6次仿真实验中,不同类型车辆的比例如表3所示。
其中,3种车辆的安全车头间距按表2来设置,即HDV为1.5 s,DCAV为1.2 s,CAV为1.0 s。仿真时长设为7 200 s,每600 s收集一次仿真数据,包括检测时刻的车道上的车辆密度、速度和流量。
3.2 仿真结果分析
通过仿真实验中收集到的数据,得到不同智能网联汽车渗透率下,混合交通流流量和密度的关系图,如图6所示。
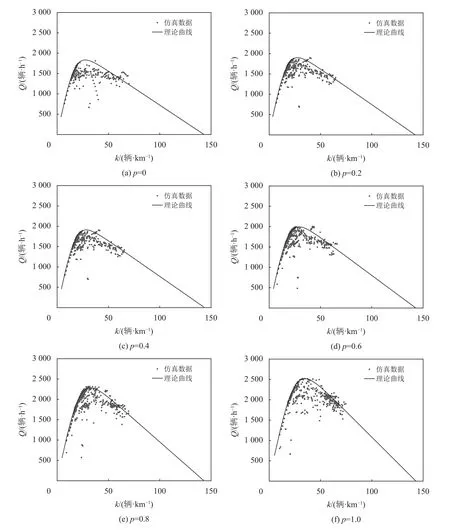
图6 仿真结果Figure 6 Simulation result
由图6可知,不同渗透率下的仿真数据点波动较大。分析可知,仿真过程中混合交通流难以达到稳定状态,因此,其结果与理论值差距较大。但仿真获得的数据点基本围绕理论曲线分布,证明了文中基本图模型的有效性及正确性。从图6的仿真散点分布可看出,随着CAV渗透率的提高,车流量的峰值逐渐升高,仿真获得的流量-密度数据点散布在理论曲线的两侧,与理论曲线的一致性较高,从而证明了智能网联汽车的应用能够提高道路的通行能力。
4 结论
本文通过运用不同参数的IDM模型来描述HDV、CAV以及退化后形成的DCAV的跟驰行为,在此基础上推导了混合交通流的稳定性判别条件和基本图模型,最后在SUMO中设计仿真实验验证了模型的有效性,通过分析可得出以下结论。
1) 通过分析混合交通流的稳定性可知,当CAV渗透率为0时,0.61m/s以及21.53m/s为混合交通流保持稳定的临界速度值。当CAV渗透率大于75.6%时,无论速度如何变化,混合交通流始终保持稳定。在稳定性判别值热力图中,车流不稳定速度区间随着CAV渗透率的增大而逐渐减小,表明智能网联汽车渗透率的提高有利于混合交通流的稳定性。
2) 通过推导混合交通流的基本图模型可知,对于同一车流速度,增大智能网联汽车的比例可提高交通流密度以及流量,说明CAV比例的增加可提升道路的通行效率。
3) 基于仿真实验收集的数据,证明了文中基本图模型的有效性和正确性。
本文同时从稳定性以及基本图的角度,更加全面地探究了含有CAV的混合交通流的特性以及CAV对于混合交通流的影响。但是本文在仿真过程中并未考虑车辆的实际换道过程,且对于随机减速的设置过于简单,与实际情况存在偏差。因此,在未来的研究中,将引入车辆换道行为,进一步分析CAV对混合交通流的影响。同时,本文仿真路段采用高速公路基本路段,未来将针对城市道路展开研究,并考虑信号灯对混合交通车流的影响。
猜你喜欢
中国交通信息化(2022年9期)2022-11-19
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
文萃报·周五版(2021年11期)2021-06-23
军事文摘(2020年24期)2020-02-06
电子制作(2019年11期)2019-07-04
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
中国交通信息化(2017年7期)2017-06-06
汽车文摘(2014年2期)2014-12-14
