高职机器人专业“四位一体”教学模式的构建与实施
2022-12-25 07:58郝建豹林子其
职业技术 2022年1期
郝建豹,林子其
(广东交通职业技术学院 工业机器人系,广州 510800)
0 引言
高职工业机器人技术专业作为培养机器人系统操作与编程、调试与维护以及系统集成岗位工作的,具有创新精神的复合型技术技能人才的新兴专业,对机器人实践要求非常高。目前专业课程实践教学过程中存在工业机器人及配套设备价格高,实训设备台套数少,实训效率低;工业机器人速度快、误操作多、实训安全隐患高[1];高职学生爱动手但实践及科技创新能力低。高职学生不爱学,自主学习积极性低[2~4]等问题。
鉴于此,笔者所在工业机器人技术专业借鉴德国双元制教学模式及泛在学习理念,推行了基于专业课程资源平台、工业机器人技术虚拟仿真实训中心(Virtual Simulation Practical Training Center-Industrial Robot Technology, VSPTC-IRT)和工业机器人技术公共实训中心的 “理、虚、实、创”四位一体的教学模式。“四位一体”教学模式的改革实践提升了实践安全问题,解决了机器人设备少,学生动手机会少等问题,取得了良好的实践教学效果。
1 “四位一体”教学模式理论基础
1.1 德国“双元制”教学模式
德国“双元制”教学模式是一种以提高实践能力为目的的职业教育培训模式,其主要优点在于4个“双元”,即学生具有学生身份和企业员工身份的“双元”,学习场所具有学校与企业(学徒培训中心)交替进行的“双元”,授课教师具有理论授课教师及技能培训教师的“双元”,学习教材具有理论教材与实训教材的“双元”。其精髓在于学生学习过程与企业生产过程紧密相连。
德国 “双元制”职业教育模式对工业机器人技术专业教学模式的启示主要有以下3个方面:
(1)高职学生自主学习能力缺乏,不仅需要任课教师理论指导,需要企业工程师深度参与成立诸如技能大师工作室,实施“项目导师制”进行全程化实践指导。
(2)工业机器人的学习不仅限于课内,更应参加协会、科技创新工作坊、参与教师纵横向科研项目提高项目实践能力。
(3)教学资源的开发不应局限于理论教材,结合企业工程项目的实训资源的开发也是必不可少的。
1.2 泛在学习理论
泛在学习是一种任何人可以在任何地方、任何时刻获取所需的任何信息的方式,是提供学生一个可以在任何地方、随时使用手边可以取得的科技工具来进行学习活动的3A(Anywhere,Anytime,Anydevice )学习[5]。学习者依据自己的学习需求和学习目标,主动利用获取到的学习资源来学习的过程,是数字化学习和移动学习发展到一定阶段的产物[6]。总之,泛在学习理论就是学习者不受时间、地点限制,可以随时、随地、随需的进行学习。
泛在学习理论对工业机器人技术专业教学模式的启示主要有以下2个方面:
(1)开发数字化教材、课件、微课、视频等在线开放资源,提供学生理论学习所必需的资源。
(2)机器人实体设备具有应用局限性,可开发线上虚拟仿真实训工作站(线)等泛在学习环境,打破实体设备的限制。
2 “理、虚、实、创”四位一体教学模式
针对工业机器人技术编程、操作等实践难点,需要合理构建教学模式,才能完成专业教学目标。结合建设的精品在线开放课程,工业机器人技术公共实训中心、工业机器人技术虚拟仿真实训中心、工业机器人技术大学生科技创新工作坊实施“理、虚、实、创”四位一体的教学模式,“理、虚、实、创”为围绕工业机器人技术专业核心课程展开的“理论学习+虚拟仿真+实训操作+科技创新”四项教学活动,其相互关系如图1所示。
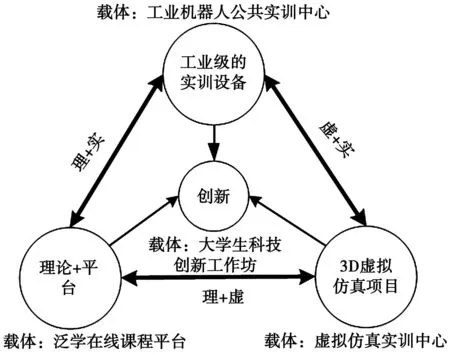
图1 “四位一体”教学模式模型
结合泛在学习理论,并借鉴 “双元制”职业教育模式的优点,通过“理、虚、实、创”四位一体教学方式,线上线下混合教学,即线上机器人仿真编程与操作,线下对机器人实际操作,学生快速、熟练掌握编程、操作技巧、并初步提高创新能力,保证实训操作人身及机器人设备的安全,大幅度提高实践教学的效果,提高学生对编程能力及操作水平,实现理论教学和实践的“深度融合”。“四位一体”教学模式的构建,对于教师最大的优点在于易教,对学生来说安全、易学,并解决了实践教学中存在的效率低等问题。
3 “四位一体”教学模式保障体系
3.1 校企协同打造具有实践和创新能力的专兼相结合的教学团队,为“四位一体”教学模式实施提供师资支撑
优秀的教学团队是保证工业机器人技术专业顺利实施“四位一体”教学模式的保障,为此在校级工业机器人技术教学团队、工业机器人技能大师工作室、工业机器人技术产学研科技平台基础上,进一步加强专兼协同的教学团队建设。具体措施为:
首先,培养高水平专业带头人,支持专业带头人参加高水平的培训学习、提升职教理念、跟踪智能制造业产业发展趋势,准确把握专业建设、岗位技能、职业等级技能、实践与创新改革方向等。
其次,与合作企业密切协同,加强骨干教师培养,安排骨干教师到企业学习,同时展开校企合作,每年派出老师分别在寒暑假参加企业的培训,通过培训、促使师资队伍的素质能逐年提高。
最后,聘请行业企业的专业人才担任技能大师工作室的核心人员,支持其指导大学生科技创新工作坊学生科技创新,综合实训等。
总之,依托科技平台和技能大师工作室,提高团队整体素质,有助于“四位一体”教学模式的顺利实施。
3.2 借助课程教学资源平台,进行理论学习
在学生进行仿真实训及实际机器人操作前,学生通过课程平台进行课前预习。为便于学生线上自主学习不受时间、空间限制,工业机器人技术专业8门专业核心课程在超星泛雅平台建设了在线开放课程,其中1门被评为省级精品在线开放课程,4门被评为校级精品在线开放课程。借助超星泛雅平台电脑 PC 端和移动手机端的资源,方便学生随时随地查看视频、微课、模拟考试、文档和 PPT 等课程资源。在线开放课程的建设为“理、虚、实、创”四位一体的教学模式理论内容的学习提供了平台。
3.3 构建“虚、实双中心”,落实教学保障
泛在学习环境——VSPTC-IRT以工业机器人四大家族之一的ABB公司的 RobotStudio软件为核心,构建了20多个3D 虚拟环境模拟真实操作,该VSPTC-IRT于2019年被评为校级虚拟仿真实训中心。
基于“先虚后实、虚实融合”原则,在虚拟仿真学习的基础上,学生去实训中心进行针对性训练。工业机器人技术公共实训中心于2018年评为校级实训基地。 “虚、实双中心”的构建可满足如下能力的培养:
(1)基础操作技能培养:熟悉和掌握工业机器人的线性运动、手动操作、示教器控制运动等基本操作;
(2)机器人典型应用仿真操作与编程能力提高:了解和掌握机器人码垛应用、机床上下料应用、搬运应用等操作与编程要点;
(3)综合应用能力培养:智能制造生产线提高学生综合操作技能解决工程问题的能力;
(4)发展与创新技能提升:依托大学生科技创新工作坊,学生可改进仿真及实体生产线,设计机器人集成工作站,提高创新能力。
3.4 打造大学生科技创新工作坊,提升学生科技创新能力以及职业能力
“理、虚、实、创”四位一体教学模式的核心目的就是提高学生的职业能力以及科技创新能力,成立工业机器人技术大学生科技创新工作坊是落实此目标的途径,工业机器人技术大学生科技创新于2018年评为校级大学生科技创新工作坊。大学生科技创新工作坊的学生选拔于工业机器人协会,其指导教师需具有2年以上企业工作经历的工程师或高级技师。学生完成的项目来自于工业机器人工程应用科技服务特色创新平台、工业机器人技术应用产学研科技平台的纵横向科研项目,如“面向快速插件的双臂机器人开发”等。
4 “四位一体”教学模式案例剖析
教学模式实施是达成专业教学目标的具体执行环节。工业机器人机床上下料是工业机器人典型应用之一,机器人和机床都属于比较昂贵的设备,也是最容易出现碰撞的教学案例。以机器人机床上下料速度优化设计为例说明以学生为中心的“四位一体”混合、互动式的教学新模式的教学过程,实施中基于“课堂+线上线下”,遵循“课前预习、课中学习、课后拓展及创新”的教学原则,具体设计如表1所示。

表1 “四位一体”实践教学模式设计
4.1 课前自主学习
学生根据泛雅学习平台的“自主学习工作页”,了解教学目标、需掌握的知识点与技能点、重难点和教学实施过程。学生自主学习在线平台上的视频、微课、动画等学习资源,根据自己学习情况利用虚拟仿真实训中心的机床上下料工作站进行仿真验证与测试。学生对自学出现的问题可以在线展开讨论。教师应当设置任务点,并根据学生的学习状况及时指导,充分调动学生的自主学习能力。
实施中任务点学生应自主学习、自主体验,便于构建属于自己的学习经验和知识体系。虚拟仿真项目应协作完成,可相互取长,可避免个别学生不能完成项目而影响积极性。教师应关注讨论区,关注后台完成任务点的人数,观看微课时长等统计信息,为课堂组织做准备。
4.2 课堂学习
“四位一体”的教学模式课堂实施中以教师主导、学生主体,目标是打造 “动起来”的有效、高效实体课堂。课堂中分为创设情境导入、根据自主学习情况及时总结的知识点与技能点讲解、 虚拟仿真、实际操作、总结总评五个教学环节。
(1)创设情境导入:以某同学实操编程视频,视频是描述“速度”,重点显示机器人空载和搬运工件时速度一致以及接近对象时速度仍然没变化。结合预习内容,学生寻找错误为教学切入点。同时检测预习情况以决定授课内容。
(2)重难点讲解:借助手机学习通APP等信息化教学手段,讲解中应注意与学生互动。
(3)虚拟仿真:学生每人有个仿真软件程序练习包示,练习界面如图2所示。应用指令在虚拟仿真实训工作站进行速度优化,仿真编程,利用RobotStudio展示速度优化前后效果对比,小组讨论评价任务指令掌握情况,推荐最优,下载到实体站。保证全体学生动起来,教师注意学生表现,进行个性化指导,并记录学习的难点。

图2 机器人机床上下料虚拟仿真工作站
(4)实际操作:现场操作应用、加深对指令的理解。机器人机床上下料实体工作站如图3所示。机器人机床上下料实体工作站以可视化的虚拟仿真编程方式改进并展示系统的速度性能,仿真成功后下载到实体平台练习,在这个过程教师观察学生职业素养包括安全意识,并根据学生的表现评定学生的平时成绩。

图3 机器人机床上下料实体工作站
(5)总结和结束课程:教师对学生表现进行评价,对重难点进行讲解和答疑解惑。
实施中情境导入要能激发学生观看兴趣和探究欲望;知识讲解应采用多样化互动形式;充分利用设备,鼓励学生在仿真好的情况下,尽快实操;教师应注重对学生的评价。
4.3 课外拓展及创新
课后教师布置任务,利用VSPTC-IRT编程实现多机器人多机床柔性制造生产线虚拟仿真系统,其生产线界面如图4所示,并把编程、速度设计等完成情况上传到虚拟仿真实训中心,以检测学生知识面拓展情况。

图4 多机器人多机床柔性制造生产线虚拟仿真系统
依托大学生科技创新工作坊,以挑战杯、互联网+大学生科技创新创业比赛为契机,鼓励学生课外科技创新,激发学生学习兴趣。学生的课外创新——多工业机器人砚台制作虚拟仿真生产线,如图5所示。该创新作品也获得全国工业机器人虚拟仿真大赛作品一等奖。实践证明,“理、虚、实、创”四位一体教学模式的实施提高了学生的创新能力。

图5 多机器人砚台制作虚拟仿真生产线
5 结语
“四位一体”教学模式实施在工业机器人技术课程教学中的应用,明显提升了教学质量和人才培养质量。该模式获得2019年广东省教学成果奖二等奖,对推动“互联网+”背景下高职教学模式改革具有借鉴意义。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
少先队活动(2021年2期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
学生天地(2020年17期)2020-08-25
天津音乐学院学报(2020年1期)2020-06-11
数学大王·低年级(2020年3期)2020-03-12
科教新报(2019年27期)2019-09-10
科教新报(2018年20期)2018-10-21
财经(2016年32期)2016-12-05
新教育时代·教师版(2016年30期)2016-12-05