基于直觉模糊集和CLAHE红外舰船图像增强算法
2022-12-14 08:36李海军孔繁程魏嘉彧沈祉怡
兵器装备工程学报 2022年11期
李海军,孔繁程,魏嘉彧,马 羚,沈祉怡
(1.海军航空大学岸防兵学院, 山东 烟台 264001; 2. 92192部队,浙江 宁波 315100)
1 引言
红外成像技术具备结构简单、环境适应性强、隐蔽性好的特点,成为精确制导武器的关键技术之一。然而,受到海上环境以及大气等因素影响时,导致的红外图像对比度下降、图像轮廓细节模糊、噪声干扰明显、亮度分布失衡等问题,给后续红外目标的检测任务造成极大的困难。所以,为能获取高质量红外图像,需要对图像进行进一步处理,使图像的对比度提升,噪声减少,细节清晰,能够满足实际应用的需求。
红外图像增强算法主要目的使突显图像中的物体轮廓细节,增强对比度。当前的红外图像增强算法按操作域划分为空间域和频率域2种增强算法。空间域算法包括均值滤波、同态滤波[1]、双边滤波[2-3](BF)、直方图均衡化[4-5](HE)等。而频率域算法包括Retinex图像增强[6]、小波变换[7-8]等。
He等[9]提出一种引导滤波器(GIF),GIF能避免梯度反转的问题,保持双边滤波的边缘保护的特点,时间复杂度较低,但也是存在细节缺失的现象。Liu等[10]通过GIF把红外图像分为基本层和细节层抑制伪影的产生,但滤波参数需自行设定,场景细节过度增强,图像不自然。基于HE的增强算法通过把分布不平衡的直方图映射成均匀分布的直方图,能够显著提升图像的对比度,但易出现损失图像的细节和过度增强的情况。后来提出了不同的改进算法,例如自适应直方图均衡化算法[11](AHE)等,算法针对HE的细节缺失和过度增强的缺点进行了改进,但会增强图像均匀区域的噪声。由于图像具有模糊性的属性,Pal等[12]提出通过模糊集理论进行图像增强,且获得了较好的增强效果。Parihar[13]提出了基于上下文的模糊对比度增强(fuzzy-contextual contrast enhancement,FCCE)算法,首先通过模糊集理论构建了模糊相异直方图的模型,然后基于图像中的上下文联系,使图像能够更符合视觉效果。基于模糊集的增强算法主要是将图像从空间域映射至模糊集域,然后进行处理,再从模糊集域映射回空间域,模糊集能够使图像的清晰度提升、噪声减少,但无法提升图像对比度。由于模糊集原理所限,很难描述一些不完整或者是模糊的信息,目前已发展多种有效的变体。直觉模糊集[14]通过引入非隶属度函数,使其能够更精确地表示出模糊信息,弥补模糊集理论的不足。Deng等[15]将图像分层后连续对子图像的目标和背景进行模糊化、双曲化等直觉模糊增强操作,区域的视觉质量得到显著提升,图像的弱边缘得到增强,但算法对于噪声干扰较为敏感。
本文针对以上算法的问题提出一种新的基于直觉模糊集和CLAHE[16]的红外舰船增强算法,首先使用引导滤波将红外图像分成细节层和基本层,利用迭代非局部均值滤波对细节层图像去噪,然后通过直觉模糊集,增强图像的边缘和细节信息,基本层图像通过CLAHE提高了图像对比度。
2 相关理论
2.1 引导滤波
引导滤波是一种通过局部窗口操作来保护平滑图像边缘的线性滤波器,其公式可定义为:
q=akIi+bk∀i∈ωk
(1)
式中:q为输出图像;i和k为ω滤波窗口的像素索引值;Ii为引导图像;ak、bk为滤波窗口的比例系数。
为能使输出图像更接近输入图像p,即令两者差值最小,以此构建最小代价拟合模型:
(2)
式中:E(ak,bk)为代价拟合函数;Pi为输入图像的第i个索引像素,通过引入修正因子ε对模型中ak的解进行修正。
利用上式通过线性回归得到参数ak、bk分别为:
(3)

2.2 非局部均值滤波
自然图像的像素在灰度,图像边缘和几何结构方面具有相似性都是相互关联的,噪声则与其显著不同。非局部均值滤波[17](nonlocal-mean,NLM)是考虑到图像像素中的噪声具有非相关的特性,而图像中包含较多的冗余信息,通过判断图像中的相似区域,对这部分区域进行平均,得到当前像素的估计值,能够很好地去除图像中的噪声。图像处理过程如下:

(4)
式中:Q为像素点x的矩形窗口搜素区域;ω(x,y)为像素点x,y之间的相似度大小;d(y)为以为中心的矩形邻域窗口。
设以像素点x、y为中心的矩形窗口为D(x)、D(y),则权值ω(x,y)可表示为:
(5)

由式(5)看出平滑系数h大小代表着高斯函数的变化程度,h越大函数变化越平缓,去噪程度越高。
3 IFS-CLAHE增强算法
通过研究分析引导滤波和直觉模糊集等方法,本文提出一种基于直觉模糊集和CLAHE的红外舰船图像增强算法。使用引导滤波对图像进行分层时会在一定程度上增强细节层的噪声,且基本层使用直方图均衡也会造成过度增强的问题。针对上述问题,本文在基本层使用改进的CLAHE进行对比度优化,细节层首先经过迭代非局部均值滤波进行降噪,然后根据直觉模糊增强红外图像的弱边缘和细节信息,最后对图像进行融合。算法流程如图1所示。
3.1 分层处理
红外舰船图像I作为引导.滤波的引导图,首先经过引导滤波fguide处理得到图像的基本层Ib:
Ib=fguide(I(x,y),I(x,y))
(6)
再通过原图像I减基本层Ib得到细节层Id,结果如图2所示。
Id=I(x,y)-Ib
(7)

图1 算法框图
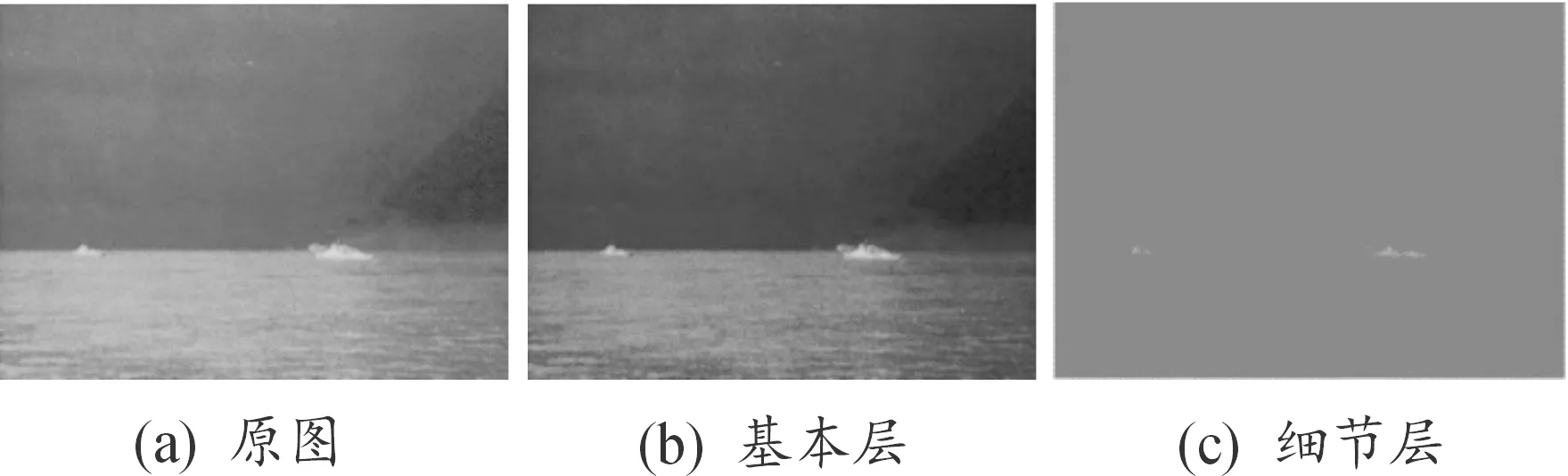
图2 红外舰船图像分层结果
3.2 细节层处理
1) 迭代非局部均值
针对细节层主要目标是减少噪声以及增强细节信息和边缘。通过引导滤波分层后,细节层的噪声虽有所减少,但还是存在一定未被消除的部分噪声,所以针对后续处理,首先应进行噪声抑制再进行红外图像细节的增强。
迭代非局部均值是将迭代过程引入NLM,其用公式可表示为
(8)

Qn={x1±k(n+1),x2±k(n+1)}
(9)
式中:x1、x2为像素点x的横纵坐标;k∈[0,N],N为正整数。当n=0,1,2即迭代进行至第1、2、3轮时,假设初始搜素范围3×3,则对应的第2、3轮的矩形窗口搜素区域为5×5和7×7,如图3所示,通过此种方式进行迭代过程,对整幅红外图像进行去噪。
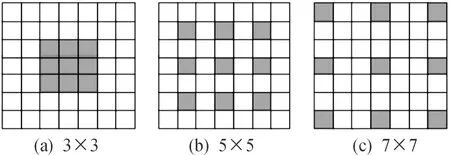
图3 矩形窗口搜索区域变化过程示意图
2) 直觉模糊增强
直觉模糊集基于物体的多样性和差异想性,而不同的人对于不同的物体看法不同,难以较为精确地表示,通过构建IFS能够很好的解释物体的不确定信息。直觉模糊集定义如下:设X为给定论域。则X中的一个直觉模糊集A为
A={〈x,μA(x),γA(x)〉|x∈X}
(10)
式中,μA(x)∈[0,1]和γA(x)∈[0,1]表示隶属函数和非隶属函数,对于∀x∈X,都有0<μA(x)+γA(x)≤1,而犹豫度用πA(x)=1-μA(x)-γA(x)来表示。
假设图像X在(i,j)的灰度值为gi, j,图像中共包含L个灰度级,并构建模糊集Gf={gi, j,μi, j}:
(11)
式中:gmax、gmin为图像中的最大、最小灰度值;μf衡量gi, j属于模糊集gf的程度。根据图像的灰度值连续变化的过程,选择Bala[18]直觉模糊集进行细节层的边缘和图像细节增强。其隶属函数可表示为:
A(μf)=1-(1-μf)
(12)
利用上式将红外图像进行直觉模糊处理,然后需要将图像从模糊域转换回空间域,这里本文通过差值修正法进行去模糊化处理,以此解决常用方法易造成犹豫度图像丢失隶属度部分的问题,将图像转换会空间域后,即可得到新的隶属度。
(13)

图4 细节层变化过程示意图
3.3 基本层处理
CLAHE算法在AHE基础上通过利用变换函数.限制图像对比度来进行增强。其核心为对直方图进行裁剪分块后再进行映射,再通过双线性插值.消除图像的块效应。
CLAHE算法步骤如下:
1) 将图像进行分割得到大小相同互不相交的m×n子块,m、n的可取4、8、16等,子块包含N个像素。
2) 将所有子块进行直方图均衡化并计算得到直方图。
3) 求解裁剪幅值T。
4) 对直方图进行裁剪并重新分配像素点。
5) 裁剪后的子块再进行直方图均衡化。
6) 利用双线性插值算法重构每个子块的灰度值。
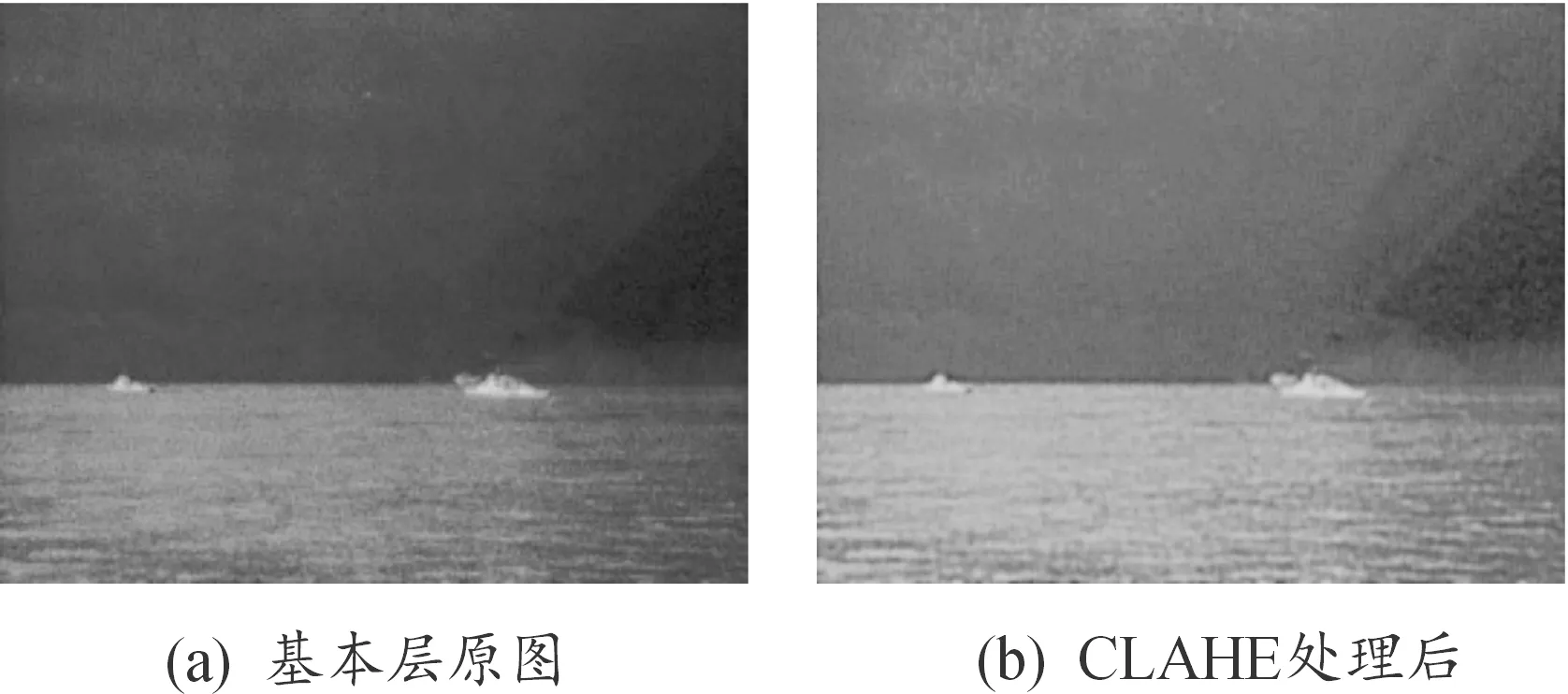
图5 基本层变化过程示意图
3.4 图像融合

(14)
4 实验结果与分析
为验证本文算法的有效性,本文进行仿真实验,实验环境为CPU corei9-12900KF,GPU为显存12G NVIDIA GeForce RTX 3080ti,开发平台为Matlab R2021a。本文采用了文献[1]同态滤波(HF)增强方法,文献[2]中的双边滤波(BF),文献[4]中的HE算法,文献[6]基于Retinex的增强方法,文献[16]中提出的CLAHE以及文献[19]非锐化掩模(UM)作为对比算法对图像进行处理,图像是公开数据中选取的3种典型代表,包括图6中场景1单一尺度红外舰船图像,图7中场景2包含多尺度舰船图像各自的尺度、角度亦不相同,以及图8的场景3岛屿背景干扰舰船图像,首先对得到的图像进行主观评价,再利用信息熵以及平均梯度和结构相似度3个衡量图像质量的指标来对图像增强效果进行客观评价。
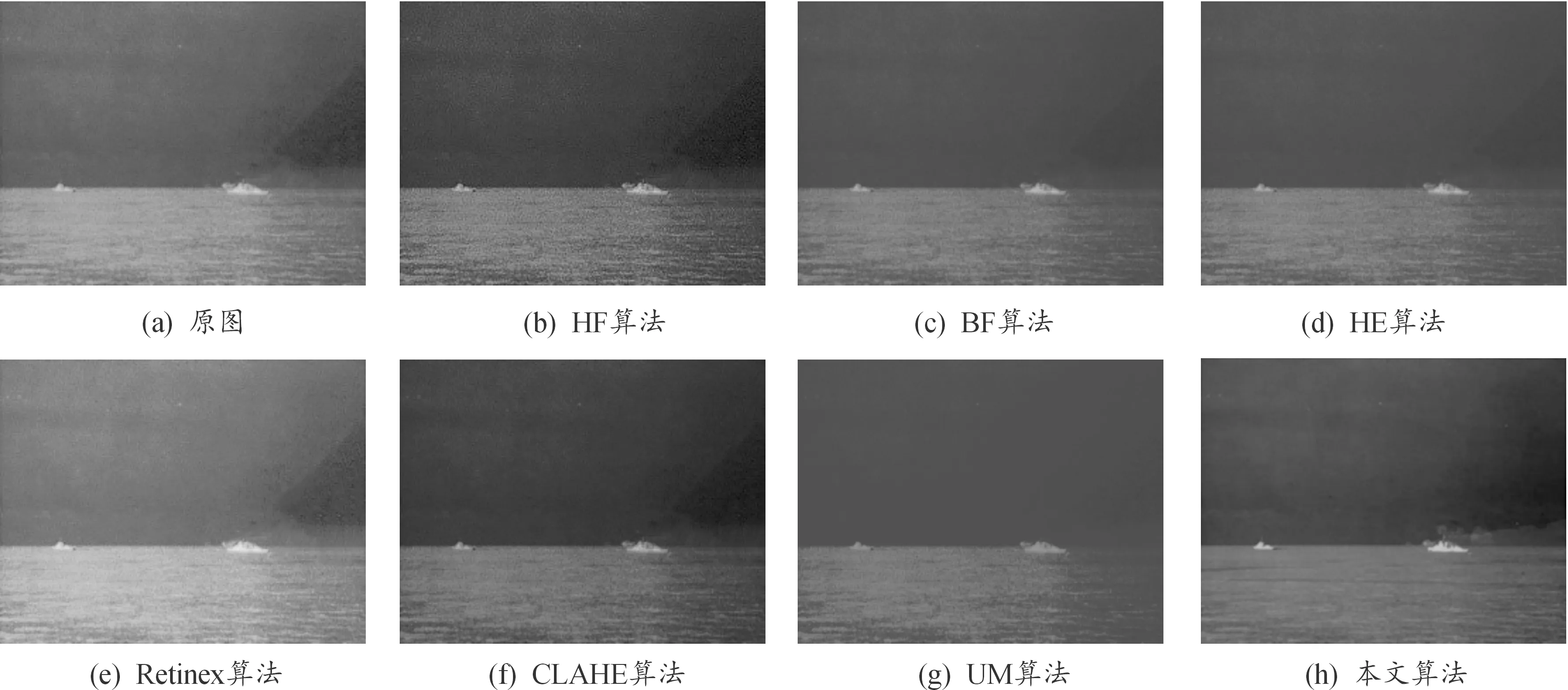
图6 单一尺度红外舰船场景图1
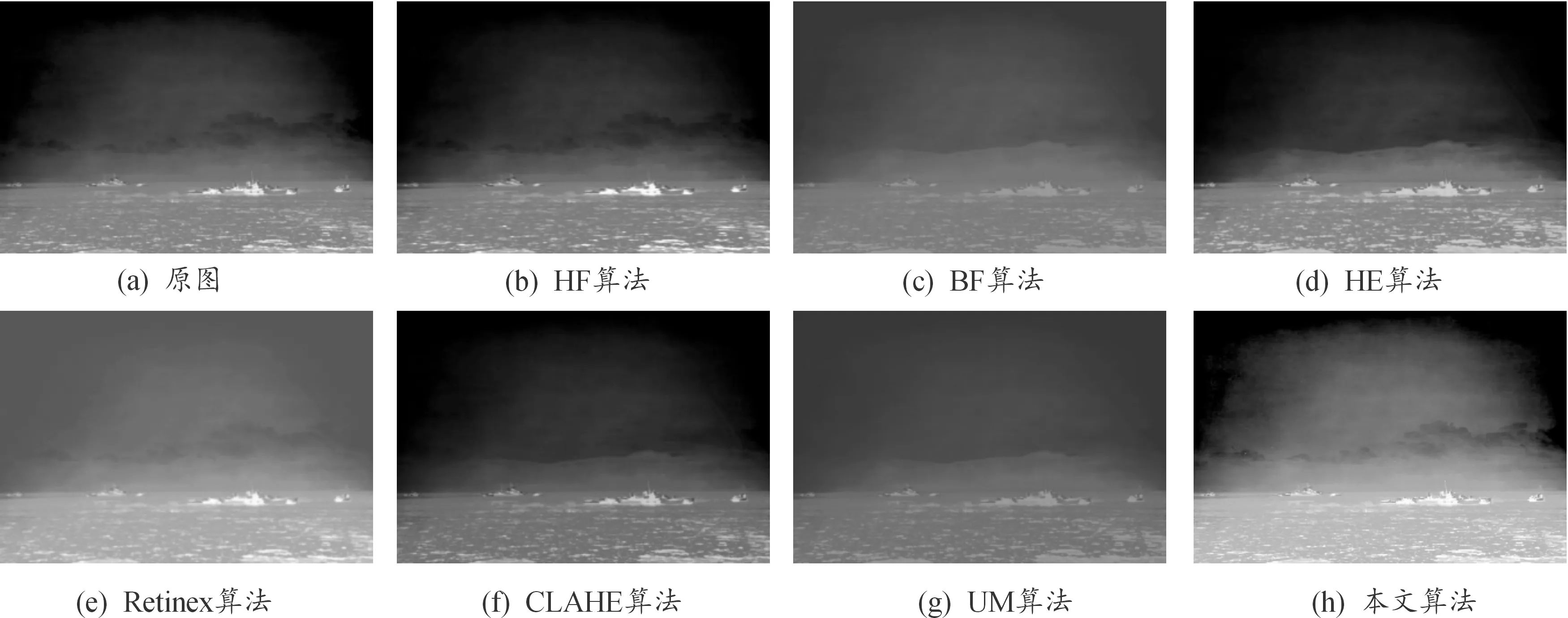
图7 多尺度红外舰船场景图2

图8 岛屿背景干扰红外舰船场景图3
4.1 主观效果评价
原图6、7、8(a)中是红外舰船的原图。图6、7、8中展示的是不同增强算法对红外图像增强效果。HF算法在场景的整体亮度以及目标对比度上略有提升,但是图像轮廓不够明显,舰船的细节纹理难以体现。利用BF算法进行降噪时,舰船的细节均有不同程度丢失,图像的对比度较弱,在场景2中难以分辨出右侧舰船,图像在整体上看偏模糊。
通过场景1的图6(d)能够看出HE算法在图像整体对比度有所提升,但出现了过度增强的问题,图像中天空的纹理细节消失,整体噪声明显,对场景2、场景3等复杂环境增强效果一般。CLAHE算法具有较好的亮度以及对比度,且很好地解决了HE过度增强的问题,但无法对天空有效增强,纹理细节仍较为模糊,针对场景2多尺度舰船图像,其亮度以及对比度有所提升,舰船整体轮廓较为明显,但对海杂波较为敏感,且舰船的纹理细节部分信息消失,相对于原图更难分辨出舰船的细节,几乎看不到左侧小目标舰船。基于Retinex的增强方法对舰船的细节有一定的增强效果,并且对背景较暗的图像的亮度提升明显,但是在场景3中由于亮度的变化使得对比度较低,分辨目标有所困难。UM算法使得图像中层次感略有提升,亮度分布更均匀,但对比度仍不足且细节信息被抑制,在场景2中背景较暗,目标捕捉困难。
图6—图8(f)中本文算法对图像对比度和亮度有明显改善,图像中的天空和海面的细节得到显著增强,右侧舰船后的岛屿轮廓细节更加丰富,视觉效果得到提升。
4.2 客观评价
为能够客观评价本文算法对红外舰船图像的增强效果,本文采用信息熵、平均梯度以及结构相似性这3项指标来衡量不同算法增强红外舰船图像的性能。
信息熵:信息熵能度量图像中信息丰富程度,其值越大图像信息越丰富。其定义为
(15)
式中:p(xi)表示随机事件X为xi的概率。
平均梯度:平均梯度能够反映图像边缘的反差和纹理特征的变化,也可以衡量图像清晰度的大小。其值越大图像的清晰度以及边缘保持效果更好。可定义为
(16)

结构相似性能够衡量图像整体的质量以及失真程度,该指标更加符合人眼视觉的感知,其值越大表明图像失真程度越低,显示效果越好。
表1表示了6种对比算法以及本文算法对3个不同场景增强效果的信息熵和平均梯度值。
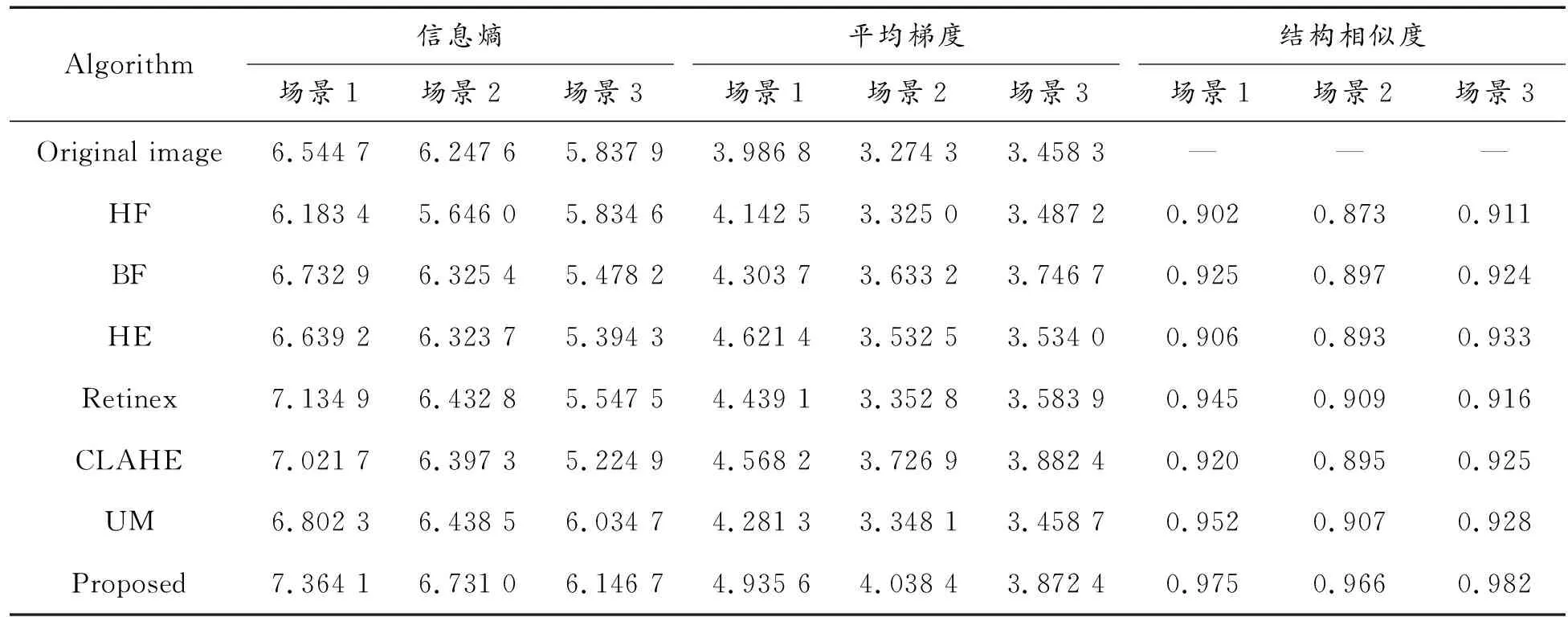
表1 不同增强算法客观评价结果
从信息熵的结果来看,本文算法在场景1、场景2和场景3的信息熵值均最高,而HE算法和HF算法提升始终不明显。而且除了本文算法以外,其余算法在场景2中无论是平均梯度还是结构相似度的指标数值均较低,表现不佳,表明传统经典算法对于包含多尺度目标的红外图像增强效果有限。场景3中UM算法表现较好,分析其原因可能是整体亮度分布均衡,对比度有所提升。综上,本文算法无论是在主观上图像增强的表现,还是客观指标上在各个场景中与其他算法的对比,本文算法在突出舰船目标、对比度提升、图像细节和边缘轮廓等方面均表现出较好的鲁棒性,且具有较好的视觉效果。
由于HE、CLAHE和UM算法的复杂度较低,本文算法运行时间相对这3种略有增加,但比HF算法以及BF算法运行效率高得多,能够保证实时性要求。综合整体的性能表现、运算效率和视觉效果来讲,本文算法适合工程应用提升图像质量的任务。各算法运行时间见表2。
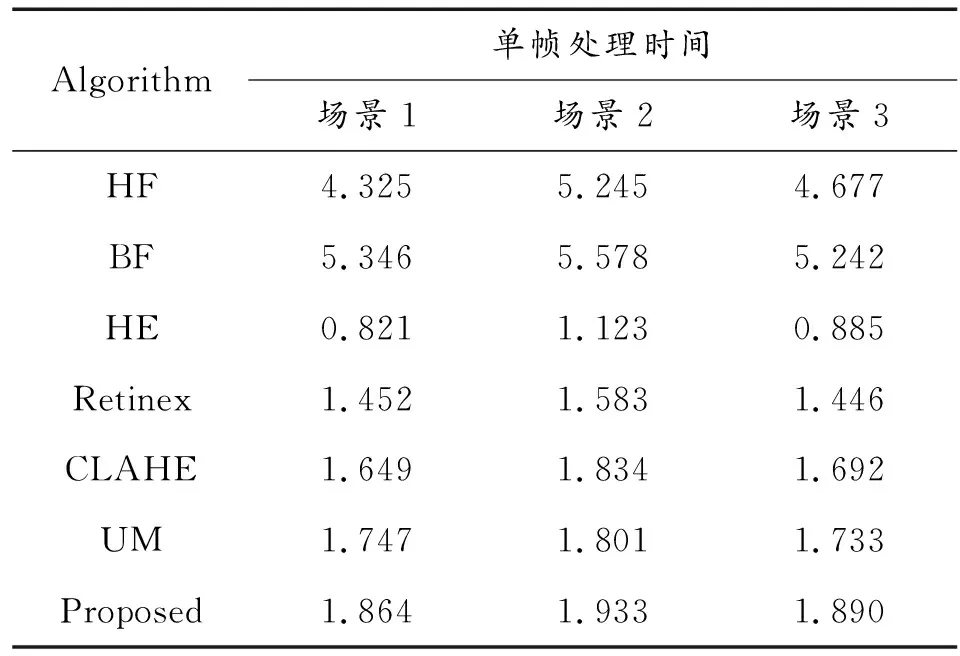
表2 各算法运行时间
5 结论
1) 从红外舰船的图像问题出发,提出一种基于直觉模糊集和CLAHE的红外舰船图像增强算法。算法主要通过分层处理、细节层增强、基本层增强和图像融合四步对图像进行增强。
2) 本文所提算法能够使图像具有更合理的对比度,以及更丰富的舰船轮廓细节,更易观察到暗弱区域的小目标舰船。
3) 本文所提算法在场景1和场景2中相对其他算法信息熵平均提升0.5左右,平均梯度提升0.6左右,3个场景的结构相似度均值为0.974,因此,本文算法增强红外舰船图像具有较好的效果。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
燃气涡轮试验与研究(2021年6期)2021-08-01
湖北民族大学学报(自然科学版)(2021年1期)2021-04-02
数学大世界(2021年4期)2021-03-30
海洋信息技术与应用(2020年4期)2021-01-18
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
山东农业大学学报(自然科学版)(2020年5期)2020-11-02
中国生物医学工程学报(2019年5期)2019-07-16
摄影之友(影像视觉)(2018年12期)2019-01-28
西华大学学报(自然科学版)(2018年6期)2018-11-24