
捕获器负泊松比蜂窝降冲击设计及其动态响应研究
2022-11-25 07:15康骁,肖阳,王笑,李辰,李营
宇航总体技术 2022年5期
康 骁,肖 阳,王 笑,李 辰,李 营
(1.北京理工大学先进结构技术研究院, 北京 100081; 2. 武汉理工大学船海与能源动力工程学院, 武汉 430063; 3. 北京宇航系统工程研究所, 北京 100076 )
0 引言
星箭分离是卫星发射任务成败的关键环节之一。而捕捉器作为星箭分离装置中的重要部件,其设计的合理性对分离释放过程中卫星设备的安全有着重要影响,因而一直以来是星箭分离设计研究的重点[1]。星箭火工分离过程中,爆炸螺栓起爆分离后,会使对接螺栓产生较高速度飞向捕捉器,进而会产生较大冲击、振动响应,甚至会直接穿透捕捉器壳体,导致卫星设备的损坏[1-2];此外,高速对接螺栓碰撞后会发生反弹,若回弹速度较高,舌片卡簧没能成功将其捕获,则会形成随机运动,影响卫星的在轨调控[1]。因而如何设计缓冲装置从而减小捕获过程中的冲击振动响应;如何通过吸能、耗能的方式实现对分离螺杆动能的吸收、耗散,从而保证对对接螺栓的成功捕获,是两个捕捉器设计中要考虑的关键问题。围绕以上两个问题,众多专家学者对捕捉器的结构进行了设计优化,其中包括杨浩亮等[3]提出的利用锥形捕捉壳体,通过对接螺栓、复合材料衬套以及锥形壳体间的碰撞摩擦以及卡死从而达到缓冲吸能以及捕获的效果。同时也包括加装橡胶缓冲垫,通过缓冲垫的低刚度实现对冲击力的减弱,并通过橡胶垫的黏弹性阻尼耗散冲击能量。在此基础上,在转接头以及安装平面间也加装橡胶垫,从而抑制振动、冲击向星体设备的传递。除此以外,滕来等[2]提出运用正蜂窝结构实现分离过程冲击的抑制。以上措施虽取得了较好的降冲吸能效果,然而降冲效果有限,且由于摩擦耗能、阻尼耗能较难通过仿真手段精确预测,需要大量实验经验积累,因而设计成本高、效率低。亟需可设计性强、吸能效果良好的结构实现相关缓冲吸能效果。近年来,随着增材制造手段的发展,基于负泊松比点阵结构[4]的缓冲吸能结构自提出后在许多防护结构当中得到了较为广泛的应用[4-10],相比于正泊松比结构,负泊松比结构拥有更高的平台应力,从而会产生更好的吸能效果[5]。然而其在火工分离装置中尤其是捕捉器中的应用较为有限。因而本文开展了针对含负泊松比点阵结构捕捉器的仿真计算研究,并将相关缓冲吸能效果与传统锥套捕捉器进行了对比。该研究为负泊松比缓冲吸能结构在捕捉器中的应用提供了理论及技术支撑。
1 研究背景
1.1 捕获器的应用需求
星箭分离火工装置需具备3项功能:分离之前,确保星箭可靠连接;分离时,保证星箭可靠分离;分离之后,确保不产生影响在轨飞行的危害。一体化的低冲击捕获器将上述3项功能集成,广泛应用于火箭星箭之间的对接。
爆炸螺栓是较早应用于火箭的一种火工分离装置。爆炸螺栓利用所装炸药产生的拉伸、剪切力学效应,使指定的部位断裂来完成解锁功能。爆炸螺栓无法限制分离后卫星一侧螺杆的运动,螺杆可能发生回弹,返回并再次插入弹体一侧的对接孔。必在后端框内侧设计盒形结构,捕获器安装在该盒形结构内。捕获器的核心零部件包括螺母、螺杆,要对其加以可靠约束,否则会形成随机运动,在头体之间产生干扰,影响卫星起控。为此,卫星一侧需要设计爆炸螺栓捕获器,阻止螺杆回弹。螺柱头以一定速度和冲量撞击结构特定部位(锥套、蜂窝等吸能结构),形成应力波和结构谐振。
爆炸螺栓外形及主要结构如图1所示,该规格的爆炸螺栓是火箭头体对接常用爆炸螺栓中尺寸最大的。爆炸螺栓工作时,剪切销在装药作用下切断,螺杆向前冲出,完成头体之间的解锁。

图1 爆炸螺栓Fig.1 Explosion bolt
舌片卡簧和缓冲块、螺杆和螺母组成被捕获体,如图2所示。
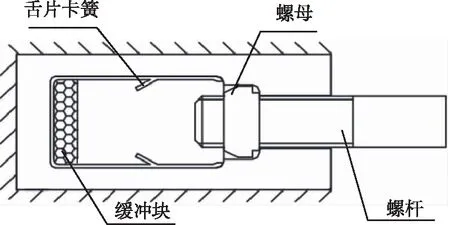
图2 捕获器组成Fig.2 Composition of the capturer
捕获器工作流程见图3,爆炸螺栓起爆解锁后,被捕获体在爆炸冲击作用下向前运动;螺母前端导向楔面撞击挤压舌片卡簧,舌片在挤压力的作用下发生弹性变形;被捕获体穿过舌片,撞击缓冲块,缓冲块吸收动能,减小对设备的冲击;被捕获体反弹,向后运动,直至螺母的台阶面被舌片反向止动。
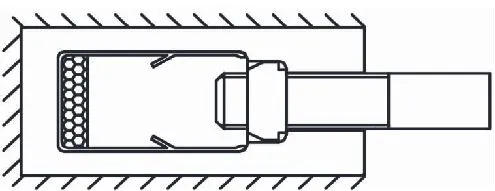
(a) 爆炸螺栓解锁

(b) 撞击舌片卡簧

(c) 穿过舌片撞击缓冲块

(d) 捕获图3 捕获器工作流程Fig.3 Working process of the capturer
1.2 负泊松比蜂窝降冲击的优势及应用
当前,随着增材制造技术的发展,负泊松比蜂窝结构正逐渐运用到抗冲结构的设计当中,并取得了良好的缓冲吸能效果,在此也考虑该结构在捕捉器中的应用。
泊松比的定义是材料受到单向拉伸或压缩时,横向应变与轴向应变的比值,其数学表达式为
(1)
式中,ε1为与压缩或拉伸方向垂直的应变,ε2为与压缩或拉伸方向平行的应变。对应变符号规定为压缩应变为正,拉伸应变为负。因此,当两个方向的应变都是压缩应变的时候,泊松比为负值,产生压缩-收缩现象。泊松比虽然是描述材料力学性能的物理量,但是可以用来描述多胞结构,这是因为在研究多胞结构性能的时候,假设多胞结构是连续介质,并用等效性能来表征结构的实际性能。对于各向同性材料来说,泊松比的取值范围在-1~0.5之间,而多胞结构往往是各向异性的,因此泊松比的取值范围远远大于各向同性材料,能够提供较大的设计空间。
虽然常见的天然材料的泊松比都大于0,但是负泊松比材料并不单单只能通过人工合成出来。负泊松比现象首先是在20世纪初,在黄铁、砷等材料中与一些动物的皮肤中发现的。虽然自然界中一直都存在负泊松比现象,但是直到1987年Fnis等[4]首次制备出了负泊松比泡沫材料,才明确提出了负泊松比这一概念。负泊松比现象的产生来自于特殊的元胞形状,能够产生负泊松比的元胞都具有类似的形状特点,在受到轴向压缩的时候,内凹的部分会产生横向的压缩变形,元胞向一起集中,如图4所示[6],而表现出刚度、强度等[5-9]的増强效应。正是负泊松比多胞结构与众不同的力学性能,吸引了越来越多的科学家去研究它的机理和应用,同时也展现出了在工程应用中的广泛前景[9-17]。
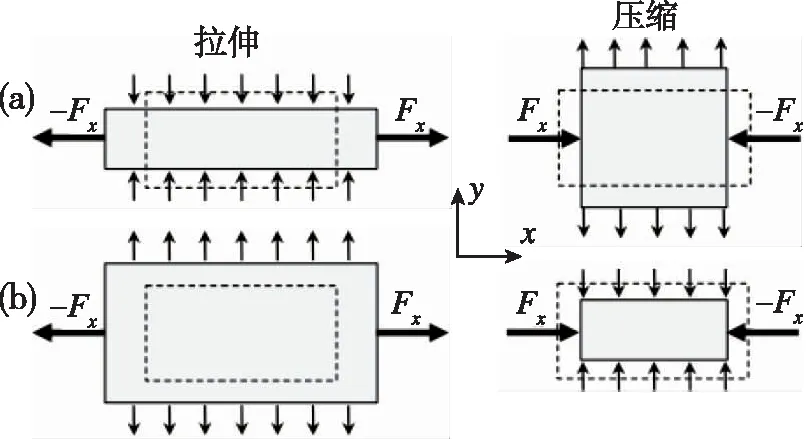
图4 拉压荷载下的材料行为[2]Fig.4 The material behavior under compression or extension load[2]
多胞结构由于能够产生较大的压缩应变,所以表现出良好的能量吸收性能。在多胞结构受到轴向压缩的时候,作用力能够做功,用作用力与位移的乘积来表示。多胞结构的能量吸收性能主要由相对密度和平台应力来决定,相对密度越低,多胞结构能够产生的应变越大,作用力的位移也就越大,而平台应力越大,作用力也就越大。但是相对密度与平台应力是一对矛盾的性能,平台应力是由多胞结构失效时的应力决定的,其与相对密度成反比关系,泊松比为正的多胞结构难以实现二者的统一。泊松比为负的多胞结构在弹性区的初始刚度小于泊松比为正的多胞结构,但随着应变的增大,产生刚度增强效应,最终获得更高的平台应力,以较低的相对密度实现了较高的平台应力。负泊松比多胞结构在受到轴向压缩的时候,结构的等效弹性模量能够得到一定程度上的增强,结构失效时的应力也相对更高。图5所示为正负泊松比多胞结构的准静态压缩应力应变曲线示意图,曲线与应变坐标轴围成的面积是单位体积吸收的能量,能够表征两种结构的能量吸收性能。

图5 正泊松比与负泊松比多胞结构的轴向压缩应力应变曲线示意图Fig.5 The schematic plot of the compression strain-stress curve of structure with positive and negative poisson’s ratio
2 捕捉器设计与计算分析
本文针对捕捉器的仿真计算模型包括两种结构。一种为传统锥套外壳的捕捉器,如图6(b)所示,传统锥套捕捉器包含螺栓、外壳、锥套以及实验板等。当螺栓受到分离冲击而向锥套移动过程中,螺栓、衬套以及锥套间会发生碰撞摩擦,从而耗散冲击产生能量。另一种为采用负泊松比蜂窝的捕捉器,如图6(c)所示,该模型由点阵结构、衬套、螺栓、外壳等组成。这种捕捉器在壳体内加装了负泊松比点阵结构,通过负泊松比结构的塑性变形吸收螺栓的冲击能量。为了比较两种捕获器结构的捕获性能,本文通过Abaqus动力有限元仿真平台分别建立了两种捕获器的模型。其中,为了保证两个模型对于冲击加速度响应测试的一致性,利用相同尺寸的铝合金平板作为两种不同捕捉器的安装平台。同时,为了防止铝合金平板边界条件对结果的影响,仅在平板外缘限制冲击方向的位移。
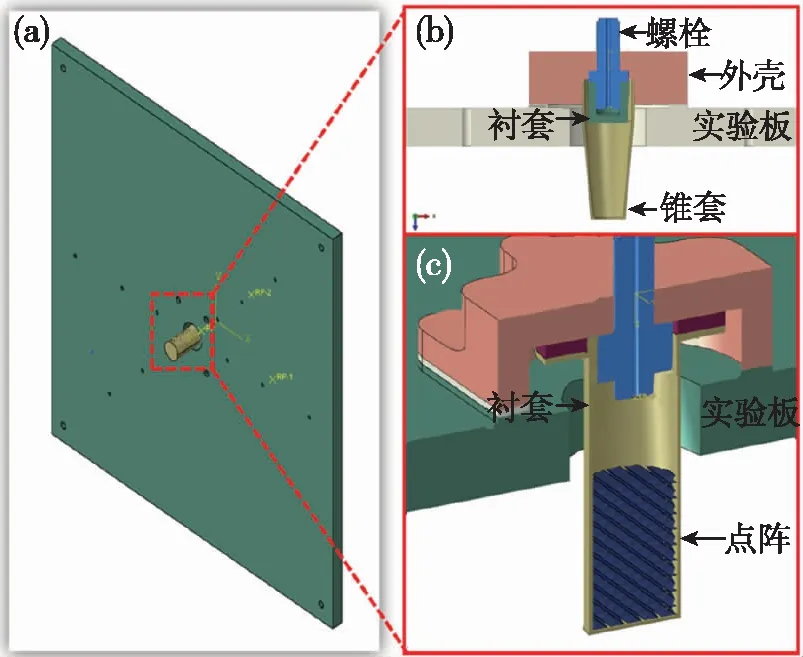
(a)捕获器位置 (b)传统锥套捕获器 (c)采用负泊松比蜂窝的捕获器图6 捕获器仿真计算模型Fig.6 Simulation model of the capturer
对于包含点阵吸能结构的捕捉器模型,在此选用三维手性结构,手性结构是典型的胞状负泊松超结构,Lakes[17]首次提出手性六角微观结构可具有负泊松比特性。“手性”这个词最初是指物体不能与本身的镜像重合,例如人的左右手,因此称为手性结构。手性超结构是由具有周期性分布的中心节点和弹性韧带切向连接形成的蜂窝型拓扑结构, 中心节点可以是圆形、矩形或任何其他几何形状。根据每个刚性节点连接的切线杆的数量,可将手性结构分为三切向杆手性结构、四切向杆手性结构和六切向杆手性结构等。将手性单元通过镜像组合可形成反手性结构,各个手性单元连接在一起形成完整的手性结构。其产生负泊松比效应的机理是:当结构横向受到压力时,刚性节点受力旋转,切向杆也随之旋转收缩产生负泊松比效应。如图7所示,所选用三维手性结构杆件直径为0.4 mm,长细比为4∶1。该结构在单向拉伸作用下会表现出独特的拉伸扭转耦合行为以及尺寸效应,具有良好的吸能效果。在此将该结构与捕捉器结构相耦合,如图8所示。
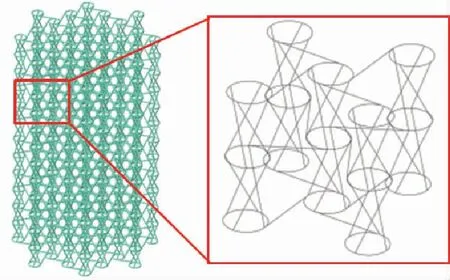
图7 三维手性负泊松比点阵结构示意图Fig.7 Schematic plot of the 3D chiral structure with negative poisson ratio

图8 捕捉器装配示意图Fig.8 Schematic plot of the assembly of the capturer
捕捉器中点阵结构采用不锈钢,该结构采用弹塑性模型,具体材料属性如表1所示,其他部分结构材料选用线弹性模型。

表1 点阵结构材料参数Tab.1 Material properties of the lattice structure
捕捉器的载荷以及边界条件的施加方式如图9所示。对于对接螺栓,设置初始速度为30 m/s,对于测试板,仅对对接螺栓速度方向进行约束。

图9 边界条件与载荷Fig.9 Load and boundary conditions with the conical enclosure
选择三维应力缩减积分单元C3D8R进行计算。设置相关接触单元保证捕捉器以及测试板中各部件间的接触, 在捕捉器与测试板、衬套与点阵结构之间采用Tie绑定连接。设置相关接触单元保证捕捉器以及测试板中各部件间的接触。在此基础上利用Abaqus/Explicit进行瞬态数值仿真求解。
3 结果讨论
通过动力有限元数值仿真分析,本文分别对捕获过程中捕捉器部件的变形过程、测试板应力传播过程以及测试板近场测点的加速度谱响应进行了分析讨论。
3.1 变形过程
此部分分别对传统锥套捕捉器的捕获过程以及基于点阵缓冲结构捕捉器的捕捉过程进行了观测。对于锥形捕捉器,如图10所示,当螺栓由于爆炸产生初速度后,会与衬套发生挤压、碰撞,从而使得部分动能从螺栓传递至衬套。进一步,衬套会与锥形壳体相碰撞、摩擦,该过程则会耗散大量能量,与此同时,螺栓也会与衬套产生碰撞、摩擦从而耗散能量。可见锥形壳体捕获器主要靠螺栓、衬套以及锥形壳体之间的碰撞、摩擦产生能量耗散。

图10 传统锥套捕捉器捕获过程Fig.10 The capture process with the traditional capturer
含三维手性负泊松比点阵结构的捕获器在捕获过程中的变形情况如图11所示,可见该类型缓冲结构主要依靠结构的塑性变形吸收冲击能量。三维手性结构在产生压缩过程中还会产生相关扭转变形,从而产生更高的平台应力,进而起到更好的吸能效果。
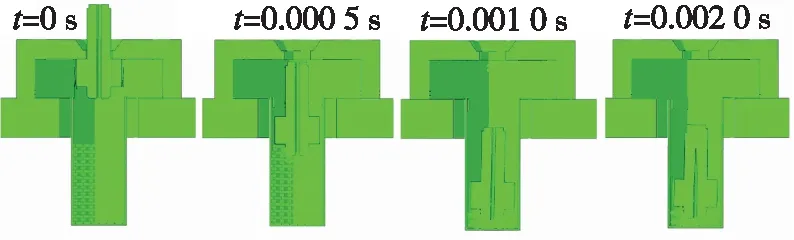
图11 三维手性负泊松比点阵结构捕获器捕获过程Fig.11 The capture process of the capturer with 3D chiral lattice structure
3.2 应力云图
捕获过程中的另一关键物理量为测试板的瞬态响应。测试板的响应用来模拟真实星箭分离过程中卫星部分的冲击响应。在此首先分析不同时刻测试板的应力分布情况。图12为传统锥套结构受冲击载荷作用下的应力分布变化。可见过程中冲击波不断从安装处向周边延伸,其在0.001 7 s左右达到峰值,之后峰值不断降低。而峰值主要出现在靠近捕捉器安装位置。
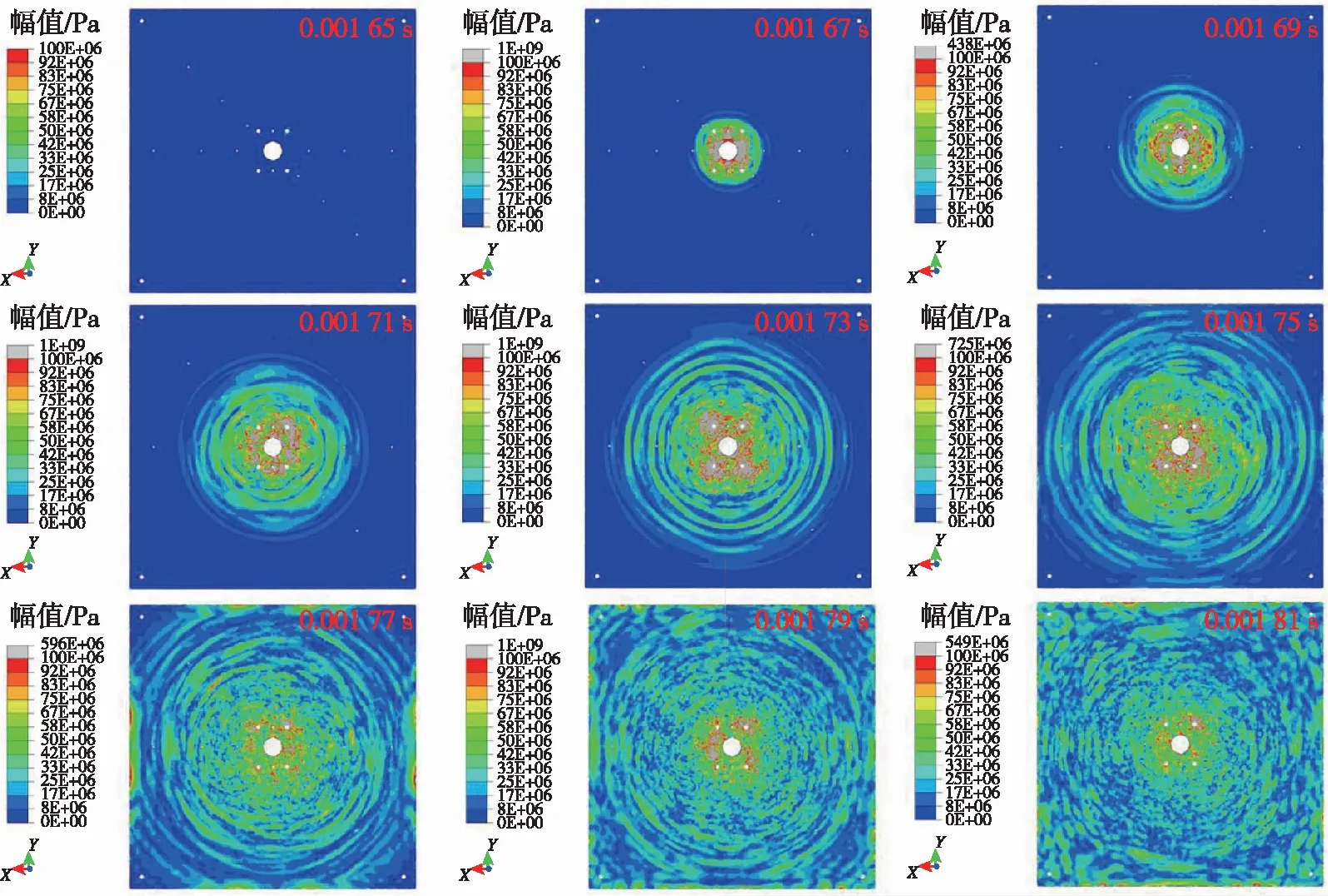
图12 传统锥套冲击载荷作用下的应力分布Fig.12 The stress distribution of the test board with traditional capturer with conical enclosure under impact loads
图13为利用三维手性结构捕捉器的应力变化情况,其应力同样也由中心区域逐渐传递到周边,较大应力部分主要集中在中心区域。若对比图12与图13,可见利用点阵结构后,安装区域以外的应力值大幅降低。可见其冲击响应得到了较大缓解。

图13 三维手性负泊松比点阵结构捕获器在冲击载荷作用下的应力分布Fig.13 The stress distribution of the test board with capturer with 3D chiral lattice structure under impact loads
3.3 采集点的加速度响应
本部分采用冲击响应谱(shock response spectrum, SRS)来描述不同条件下的冲击环境。冲击响应谱是指将冲击载荷施加到一系列线性、单自由度弹簧质量系统时,各单自由度系统的最大响应值作为对应于系统固有频率的函数而绘制的曲线,航天工程中的设计规范和实验规范大都以冲击响应谱为参数给出。
加速度的测点位置位于距离安装中心一段距离的测试平板上,如图14所示。在得到各点加速的时程曲线之后,采用描述航天器爆炸冲击环境推荐的参数设置,即放大系数=10,频率间隔取1/12的频程,采样率100 K,分析频率范围为1~10 000 Hz。对关键测点位置的加速度时域曲线经过频谱转换后得到冲击响应谱。所得冲击响应谱如图15所示,对比图15(a)和(b),可见采用点阵吸能结构的捕捉器其冲击响应谱加速度峰值从43 358g降低至22 021g,降低了49.2%。可见利用三维手性结构可显著抑制冲击加速度响应。
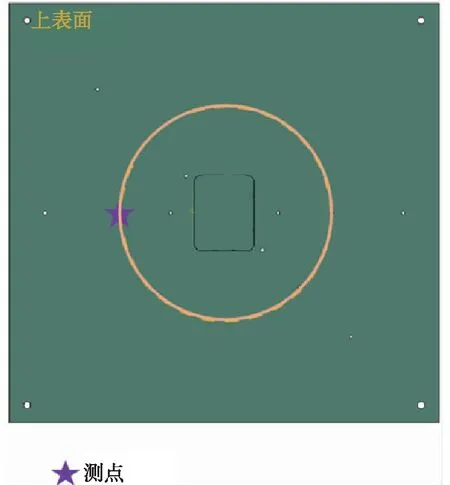
图14 加速度采集点Fig.14 Shock response spectrum test point

(a) 传统锥套结构

(b) 点阵吸能结构图15 冲击响应谱Fig.15 Shock response spectrum
4 结论
通过对传统锥套捕获器与三维手性负泊松比点阵结构捕获器的降冲击过程进行有限元模拟,对比分析得出以下结论:
1)三维手性负泊松比点阵结构在受到螺栓的冲击时,通过大量的塑性变形吸收冲击能量,具有良好的降冲击效果。传统锥套捕获器则通过螺栓与锥套之间的摩擦实现减速,对锥套的设计空间要求很高。
2)实验板的应力云图揭示了三维手性负泊松比点阵结构捕获器相比于传统锥套捕获器可显著降低应力的传递。
3)测点的加速度响应谱揭示了三维手性负泊松比点阵结构捕获器相比于传统锥套捕获器可显著降低10 000 Hz内的加速度幅值,冲击响应谱加速度峰值降低了49.2%。
猜你喜欢
分子催化(2022年1期)2022-11-02
测控技术(2022年9期)2022-09-23
河北农机(2021年12期)2022-01-06
汽车零部件(2021年7期)2021-07-29
科学技术与工程(2020年14期)2020-06-23
科学技术与工程(2020年4期)2020-04-08
探索科学(学术版)(2019年11期)2019-06-16
汽车实用技术(2018年20期)2018-10-26
民用飞机设计与研究(2018年1期)2018-05-04
国外医药(抗生素分册)(2016年4期)2016-07-12
