BDS-3 新频点B1C/B2a 动态数据特性及PPP 精度分析
2022-11-06 04:12刘永正蔡昌盛崔先强朱永兴
全球定位系统 2022年5期
刘永正,蔡昌盛,崔先强,朱永兴
(1.中南大学 地球科学与信息物理学院,长沙 410083;2.地理信息工程国家重点试验室,西安 710054)
0 引言
2021 年7 月31 日,我国自主建设的北斗三号卫星导航系统(BDS-3)正式建成并为全球用户提供高质量的定位、导航及授时服务[1].BDS-3 星座的完整构建,为全球导航卫星系统(GNSS)家族提供了更多的卫星数据源.卫星数量的增加为获取可靠的定位解创造了前提条件.BDS-3 在保留原有B1I、B3I 信号频点的基础上,新增了与GPS、Galileo 兼容的B1C、B2a 新频点.自2017 年中国卫星导航系统管理办公室发布BDS-3 B1C、B2a 接口控制文件以来[2-3],BDS新频点B1C、B2a 的数据质量及其定位性能受到了业界的普遍关注.
已有不少学者对BDS-3 新频点的数据质量与定位性能进行了分析与评估.伊珣等[4]对数据质量进行了对比分析,尤其在载噪比(CNR)与多路径误差方面BDS-3 新频点的数据质量较北斗二号卫星导航系统(BDS-2) 有了很大地提升.ZHANG 等[5]研究发现,由于BDS-3 的信噪比较BDS-2 有所提高,导致BDS-3 的伪距观测值噪声变小.HUANG 等[6]基于全球连续监测评估系统(iGMAS)测站数据从观测噪声和伪距多路径两个方面对BDS-3 观测数据进行了初步分析,结果表明B2a 频点数据质量优于B1C 频点.贺延伟等[7]分析评估了BDS-3 与BDS-2 的基本服务性能,结果表明新频点B1C、B2a 的伪距单点定位性能优于B1I、B3I 旧频点.ZHU 等[8]研究发现BDS-3 B1C、B2a 新频点的数据质量及精密单点定位(PPP)性能与GPS、Galileo 在同一水平.慕仁海等[9]进行了BDS-3 新频点PPP 试验,发现PPP 在东(E)、北(N)、天顶(U)三个方向上均能达到分米级的定位精度.谷世铭[10]研究发现采用B1C/B2a 组合相较于B1I/B3I组合可以缩短PPP 收敛时间与改善定位精度.
从已有文献来看,对于BDS-3 新频点数据质量及定位性能的研究大都针对静态数据,缺乏动态模式下数据质量特性及定位性能的评估.基于此,本文采用车载动态试验数据,从CNR、数据完整率、伪距与载波相位观测值噪声和伪距多路径四个方面分析BDS-3 新频点B1C、B2a 的数据质量特性.在此基础上,进一步评估了动态PPP 性能.
1 BDS-3 新频点数据质量特性分析
为了评估动态模式下BDS-3 新频点B1C/B2a 的数据质量及PPP 定位性能,于2021 年11 月13 日10:00—11:00(GPS 时 02:00—03:00)进行了车载动态试验.试验从中南大学附近出发沿长芷高速行驶约1 h,数据采样间隔为1 s,截止高度角为0°.图1 为试验数据采集装置与行驶轨迹图.试验采用Trimble ALLOY 大地型接收机以及TRM57971.00 NONE 天线,该型号接收机可以同时接收GPS L1/L2/L5、GLONASS G1/G2/G3、Galileo E1/E5a/E5b/E6 和BDS B1I/B2I/B3I/B1C/B2a/B2b 信号.Trimble Alloy GNSS接收机含有两块Trimble Maxwell 7 芯片组,拥有超强处理能力,可以跟踪到的卫星系统包括GPS、GLONASS、Galileo、BDS、准天顶卫星系统(QZSS)和印度区域导航卫星系统(IRNSS),可同时捕获到50~60 颗GNSS 卫星.此外,Trimble Alloy 接收机最大数据记录频率为100 Hz,本文动态试验过程中,将接收机的数据更新率设置为1 s.Alloy 接收机支持多种观测值文件导出格式,包括T02、T04、BINEX、RINEX v2.x/3.0x 和Google Earth KML/KMZ,本文采用常用的RINEX 3.04 文件格式进行后续处理.试验过程中,天线放置在车顶,接收机放置在车内.
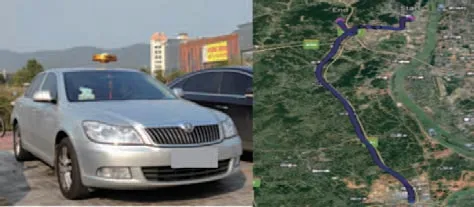
图1 GNSS 车载动态数据采集装置及行驶轨迹
1.1 CNR
CNR 定义为接收机获取的载波信号功率与噪声功率的比值,可以直接反映接收信号的强度,每颗卫星每个历元的CNR 数值可以直接从观测文件中获取.图2 描述了BDS/Galileo/GPS/GLONASS 不同频率的CNR 分布,由图2 可知,不同GNSS 不同频率的CNR 范围为20~60 dB-Hz;BDS 中B2a 频率CNR较其他频率更大,在整个试验阶段其CNR 均方根(RMS)为46.8 dB-Hz;GPS L5 频率的CNR RMS 优于L1 与L2 频率,其平均值比BDS B2a 大3.6 dB-Hz;Galileo E6 频率的CNR 较其他几个频率更好,其RMS 值比B2a 大1.8 dB-Hz,其余频率与B2a 频点处于同一水平;GLONASS G3 频率CNR 优于G2 和G1 频率,其RMS 值相比BDS-3 B2a 略小.但是整个试验过程中仅有2 颗卫星可以播发G3 频率的观测值,数据样本小.
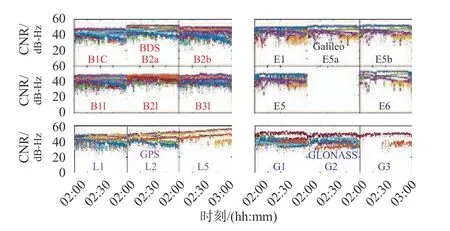
图2 BDS/Galileo/GPS/GLONASS 各卫星各频率CNR 分布图
1.2 数据完整率
数据完整率为完整观测值数量与理论观测值数量的比值,是GNSS 数据质量分析的一个重要指标[11].本研究定义某历元能同时获取到伪距与载波观测值时为该历元数据完整.图3 给出了不同GNSS 各个频率的平均数据完整率.BDS-3 B1C、B2a、B2b 新频点中B2b 数据完整率最低为73%,B2a 的数据完整率最高为79%,但略差于B1I 频点;GPS 中L2 频率完整率最高,与BDS B2a 完整率在同一水平;GLONASS与Galileo 中G1 频率与E1 频率数据完整率最高,但均低于BDS-3 新频点.综合来看,整个动态试验过程中BDS 与GPS 卫星跟踪能力最强,数据丢失率相对较低.

图3 BDS/Galileo/GPS/GLONASS 不同频率观测值平均数据完整率
1.3 伪距与载波相位观测值噪声
伪距与载波相位观测值噪声是反映GNSS 接收机性能与定位精度的重要指标之一,本文通过四次差法求取伪距与载波相位观测值噪声[12],即在星间单差的基础上求取历元间三次差.表1 统计了不同卫星系统各个频率的伪距与载波相位观测值残差的RMS.由于在动态试验过程中缺少Galileo E5 频率载波相位观测值,因此,没有对Galileo E5 频率的载波相位观测值残差进行统计.从表1 中可以得出,BDS-3 B2b 频率的伪距残差RMS 最小为0.035 m,B1C、B2a 及B2I 频率伪距残差RMS 约为B2b 频率的3 倍;GPS、GLONASS、Galileo 伪距残差分别是L5、G3、E5 频率最优,但均大于BDS B2b 频率,其值约为B2b 频率的2~3 倍.总体来看,四大系统中GLONASS G1 与G2 频率的伪距残差明显大于其他卫星系统,其原因可能是由于其采取频分多址(FDMA)的模式导致的.在载波相位观测值残差方面,BDS-3 新频点与BDS 旧频率及其他系统频率间处于同一水平,其RMS 值都位于0.020 m 附近.值得注意的是,在动态模式下,四次差法获得的伪距和相位残差中包含了历元间的距离变化量,其残差统计值相比静态模式下更大.

表1 各GNSS 系统各频率伪距和载波相位观测值残差RMS 统计值 m
1.4 伪距多路径
多路径误差是影响定位精度的主要误差项,本文通过伪距与载波相位观测值组合求取伪距多路径[13].图4 统计了四个星座各个频率所有卫星的伪距多路径RMS 平均值.从图4 中可以看出,BDS-3 新频点中B2b 信号抗多路径能力略强,但相比旧频点,B2I信号稍弱;Galileo E5a 与BDS 新频点伪距多路径在类似的水平上,RMS 均约为0.15 m;GPS L5 频点较BDS-3 新频点抗多路径能力更强,其RMS 比BDS B2b 小4 cm;GLONASS G1 及G2 频率的伪距多路径远远大于BDS B2b 频率,约为B2b 的3~4 倍.
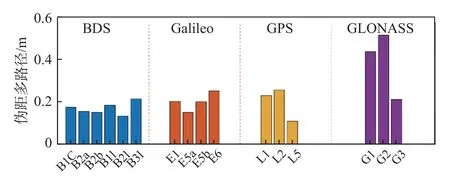
图4 不同GNSS 各频率所有卫星伪距多路径RMS 平均值
2 动态PPP 定位性能分析
基于本文采集的车载动态试验数据进行PPP 数据解算[14].为了方便对比BDS-3 新频点PPP 定位性能,将BDS-3 B1C/B2a 双频组合PPP 定位结果与BDS B1I/B3I 旧频点组合PPP 结果进行了对比,同时,也跟其他GNSS 双频组合PPP 定位结果进行了对比分析.具体PPP 参数数据的处理策略如表2 所示.
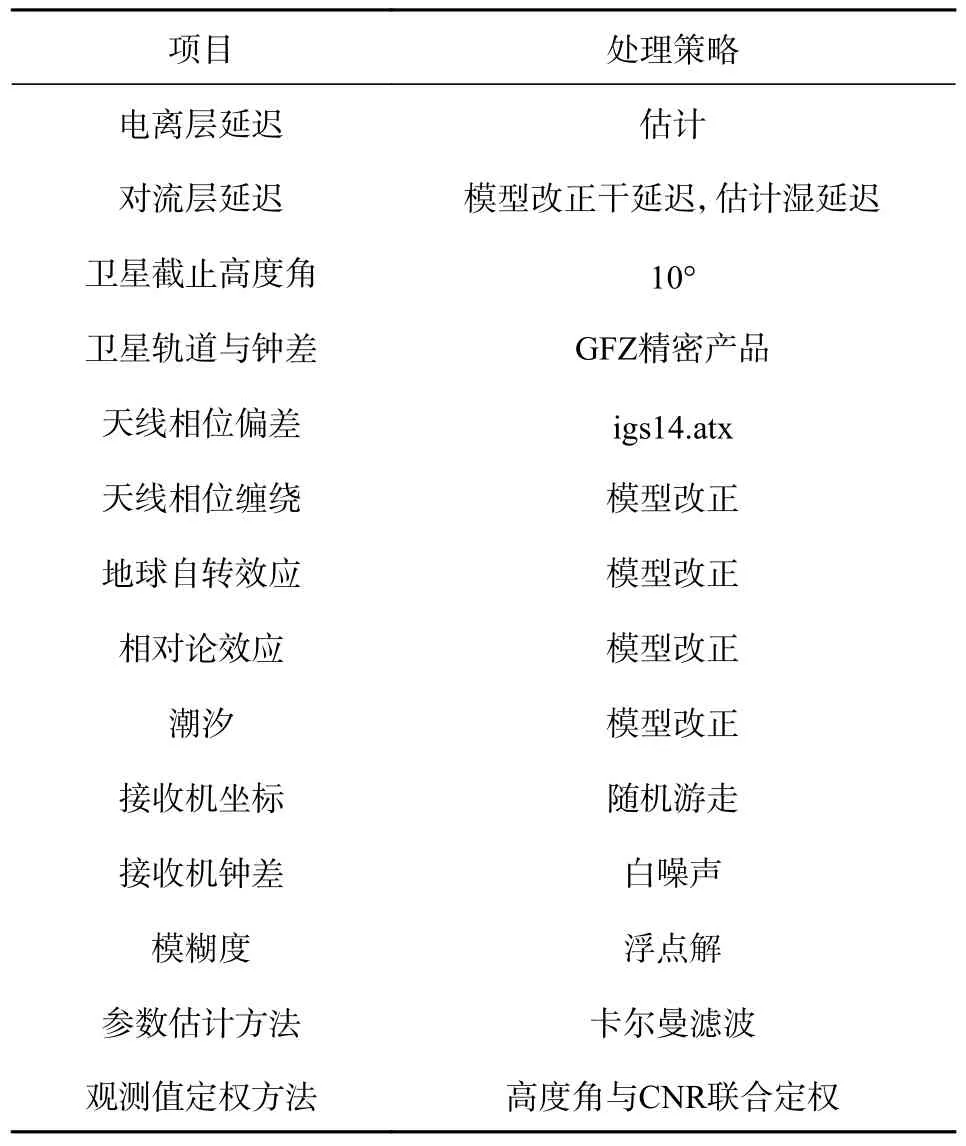
表2 PPP 参数估计具体处理策略
图5 为车载动态试验过程中各GNSS 的可视卫星数及位置精度衰减因子(PDOP)分布图,图5 图例中GPS、GLONASS、Galileo、BDS(a)、BDS(b)分别表示GPS L1/L2、GLONASS G1/G2、Galileo E1/E5a、BDS B1I/B3I 及BDS-3 B1C/B2a 组合方案.从图5 中可以看出,在整个车载动态试验期间,可视卫星数量波动剧烈,从而导致PDOP 值相应变化剧烈.究其原因是车载动态试验过程中,接收机锁星不稳定,GNSS观测值存在频繁的丢失,且行驶过程中接收机受到一定的遮挡,导致可用于定位的卫星数出现频繁的波动,进而导致PDOP 剧烈跳动.图5 中BDS(a)所示的BDS B1I/B3I 组合方案中,不仅包含BDS-2 卫星同时也包含BDS-3 卫星,因而其卫星数量明显更多并且PDOP 值最小.与GPS、GLONASS、Galileo 相比,图中BDS(b)所示的BDS-3 B1C/B2a 组合方案卫星数量稍多,导致其 PDOP 值更小.
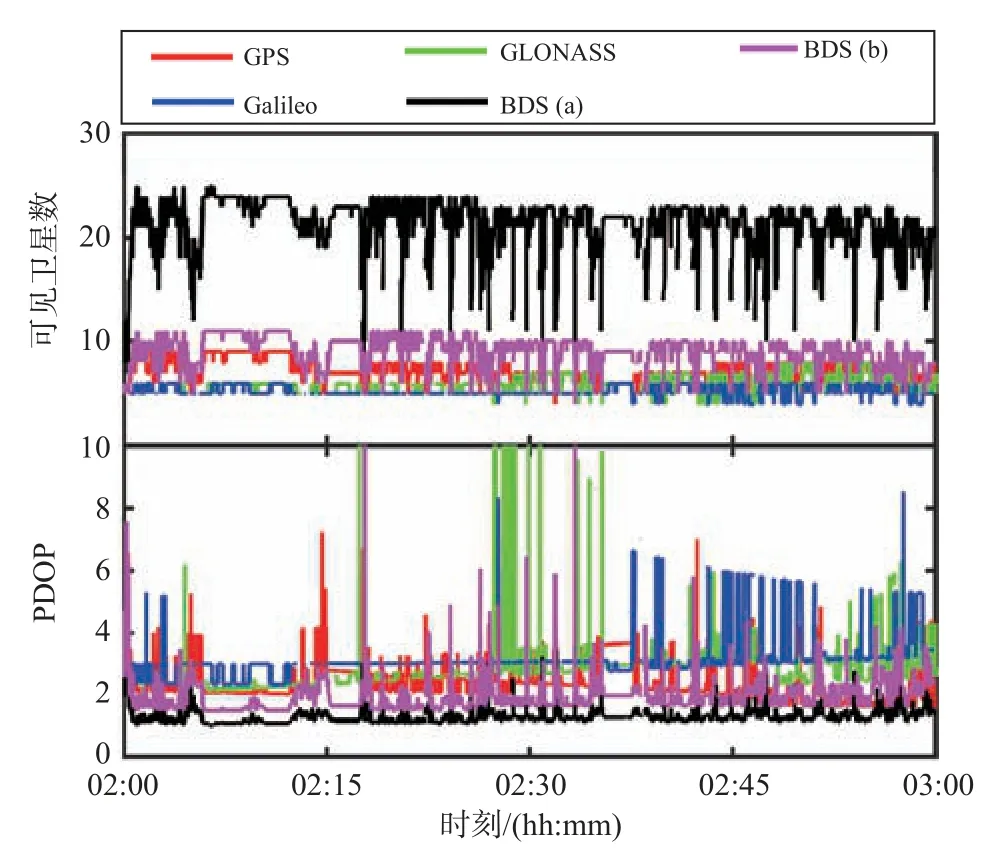
图5 各GNSS 系统可见卫星数量及PDOP 分布图
本次车载动态试验采用多系统实时动态(RTK)固定解作为动态位置参考真值,图6 给出了各GNSS 单星座动态PPP 定位误差曲线图.从图中可以看出,由于卫星数频繁波动导致动态PPP 定位解不稳定,存在频繁的重收敛.BDS-3 新频点B1C/B2a 组合方案BDS(b)定位误差曲线相较于其他系统双频组合更为平滑,波动范围更小,定位精度更高.BDS(a)采用旧频点B1I/B3I 组合方案,尽管可见卫星数更多,但卫星数量变化剧烈,再加上包含的BDS-2 观测数据及精密数据质量不如BDS-3,导致重收敛现象明显,定位精度相比BDS-3 新频点定位结果有所下降.
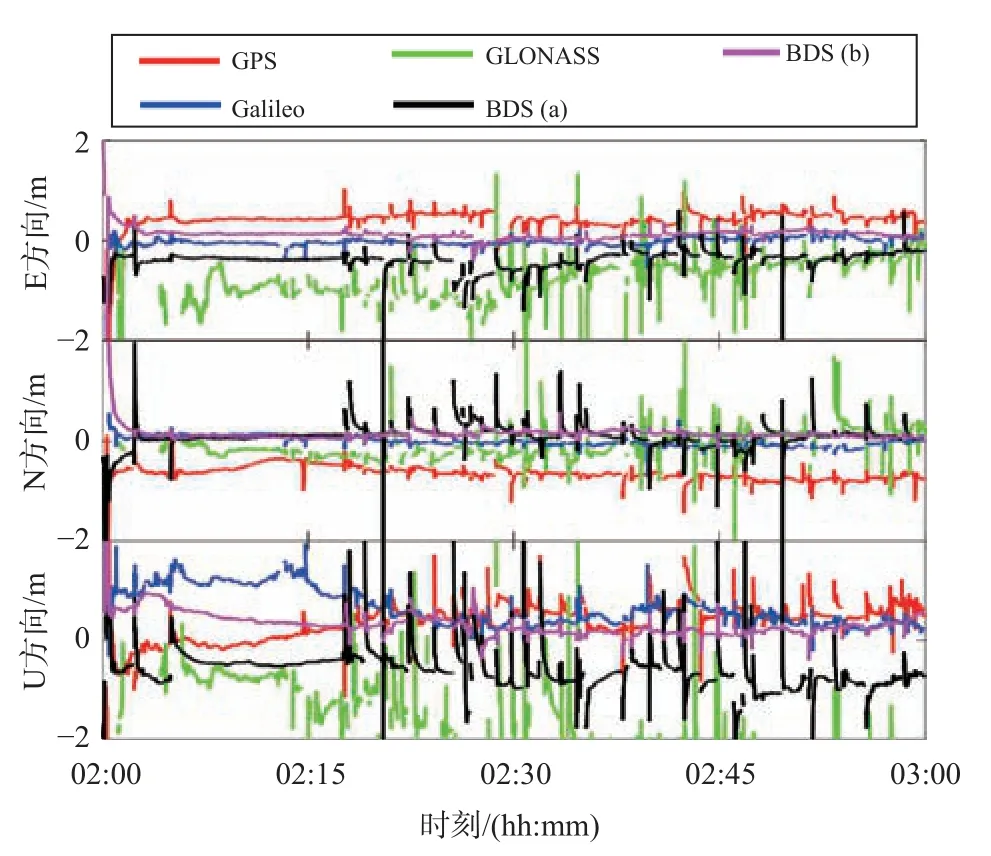
图6 各GNSS 系统单星座动态PPP 定位误差曲线图
表3 进一步统计了各GNSS 动态PPP 定位误差RMS 值.在统计计算时排除了E、N、U 三个方向定位误差大于2 m 的数据.从表3 中可以看出,BDS-3新频点B1C/B2a 组合方案定位精度最高,其三维(3D)位置误差RMS 值为0.44 m;Galileo E1/E5a 次之;GLONASS G1/G2 定位效果最差,其3D RMS 达到了2.36 m,这与上文所分析的GLONASS 数据完整率较低,伪距观测值残差与伪距多路径较大有关.BDS-3 新频点 B1C/B2a 组合方案相较于BDS B1I/B3I、GPS L1/L2、Galileo E1/E5a、GLONASS G1/G2 组合方案定位精度分别改善了49%、56%、42%及81%.
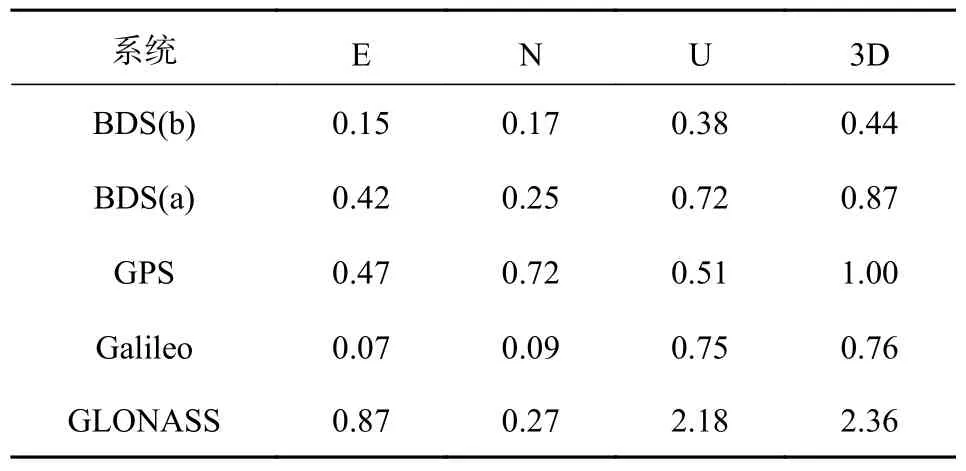
表3 各GNSS 系统动态PPP 定位误差RMS统计值 m
3 结束语
本文从CNR、数据完整率、伪距与载波相位观测值噪声和伪距多路径四方面分析了BDS-3 新频点B1C/B2a 的数据质量及动态PPP 定位性能,并与BDS 旧频点及其他GNSS 进行了对比.
在数据质量方面,BDS-3 新频点中B2a 信号CNR最优,其RMS 为46.8 dB-Hz,略小于GPS L5 与Galileo E6 频率;BDS-3 新频点数据完整率大体上与GPS L2 和L5 频点处于同一水平,整体来看BDS 与GPS数据丢失率低于Galileo 和GLONASS;BDS-3 B2b伪距观测值噪声最小,B1C 和B2a 伪距观测值噪声约为B2b 信号的3 倍,但不同频率相位观测值噪声处于同一量级;BDS-3 B2b 信号伪距多路径RMS 值小于B1C 及B2a 信号,但是GPS L5 信号的抗多路径能力在所有GNSS 中最强.
在动态PPP 定位性能方面,GLONASS G1/G2 组合动态PPP 定位精度最低,而BDS-3 B1C/B2a 组合PPP 效果最好,其3D 位置误差RMS 值为0.439 m.BDS-3 新频点 B1C/B2a 组合方案相较于BDS B1I/B3I、GPS L1/L2、Galileo E1/E5a、GLONASS G1/G2 组合方案定位精度分别改善了49%、56%、42% 及81%.值得注意的是,本文的结论是基于真实场景下的动态试验数据获得的,定位精度受到了真实动态环境多种因素的影响.
猜你喜欢
中国交通信息化(2022年8期)2022-11-20
地理空间信息(2022年10期)2022-10-31
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
导航定位学报(2021年5期)2021-10-13
空军工程大学学报(2021年2期)2021-05-29
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
中国新通信(2020年3期)2020-07-06
制导与引信(2018年2期)2018-11-09