BDS-3载波相位平滑伪距单点定位性能分析
2022-10-31 12:01:50岑铭
地理空间信息 2022年10期
岑 铭
(1.广西壮族自治区水利电力勘测设计研究院有限责任公司,广西 南宁 530023)
对于刚刚建设完成的北斗卫星导航系统(BDS),其定位精度、卫星空间构型、定轨授时等性能受到国内外广大学者的关注,也将是研究的热点[1]。北斗三号(BDS-3)最后一颗组网卫星于2020-06-23成功发射,于2020-07-31正式开通全球服务,在轨卫星共计30颗,能播发B1I、B1C、B2a、B2b、B3I等多个频率,极大丰富了多频组合定位的多样性。伪距单点定位是采用伪距观测值实现普通定位的技术,受码伪距噪声和多路径的影响,一般定位精度较低,适用于车辆、船舶、飞机等定位精度需求不高的导航应用中[2-4]。相比伪距观测值,相位观测值观测噪声和多路径误差更小,而载波相位平滑伪距算法可以有效抑制多路径效应对伪距的影响,且不存在模糊度固定问题,能有效提升伪距单点定位精度[5-12]。鉴于当前对BDS-3相位平滑伪距单点定位性能研究较少,本文基于多个MGEX跟踪站多天数据,采用CNMC相位平滑伪距算法进行伪距单点定位,并对BDS-3单频与双频定位结果进行了分析。
1 数学模型
1.1 伪距单点定位模型
BDS-3单频伪距单点定位模型[13-14]为:

式中,i为频率;Pi代表伪距观测值;ρ为测站与卫星之间的几何距离;dtr为接收机钟差;dts为卫星钟差;Ii为电离层延迟;Ti为对流层延迟;εi为伪距观测噪声。
双频组合无电离层伪距单点定位模型是最常用的数学模型,以B1I和B3I两个频率为例[12]。
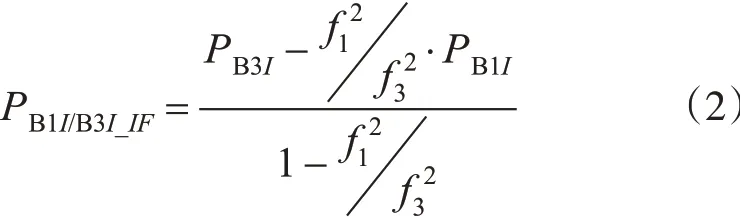
式中,IF为双频无电离层算子;f为频率。
1.2 CNMC相位平滑伪距数学模型
CNMC算法是一种相位平滑伪距算法,能实时削弱伪距多路径误差,提升伪距单点定位精度[15]。以B1I和B3I两个频率为例,单频CNMC相位平滑伪距数学模型为[12]:


2 实验与定位结果分析
2.1 数据选取与数据处理方案
为使实验结果具有代表性,本文选取了7个MGEX跟踪站数据,分别为GODN、JFNG、KRGG、POTS、SGOC、SUTM和YAR2站,时间为2020年第310~314天,数据采样频率为30 s,其中YAR2站接收不到BDS-3卫星B2b信号,因此不对YAR2站BDS-3卫星B2b频率定位性能进行分析。
在进行数据解算时,采用自编软件,卫星截止高度角设置为10°。采用高度角定权,利用Saastaminen模型修改对流层模型,单频伪距单点定位电离层延迟改正采用Klobuchar模型,双频组合伪距单点定位采用无电离层组合模型,参考坐标通过IGS中心的SNX文件获取。单频解算频率选择B1C、B1I、B2a、B2b以及B3I频率,双频解算频率选择B1C/B2a以及B1I/B3I组合,分别进行CNMC相位平滑伪距单点定位解算和非CNMC相位平滑伪距单点定位解算。
2.2 单频伪距单点定位结果分析
根据解算方案以及参考坐标,将解算得到的三维坐标结果转换到E、N、U 3个方向,计算得到3个方向的定位误差,并且根据定位误差进一步统计各测站多天RMS平均值作为评估标准。图1给出了各频率单频伪距单点定位误差时间序列,以POTS站第310 d数据解算结果为例。
如图1所示,B2b频率3个方向定位误差要大于B1C、B1I、B2a、B3I 4个频率,而B1C、B1I、B2a、B3I 4个频率对应方向定位误差相当。所选5个频率任一频率在平滑前伪距观测噪声都较大,导致定位误差较大,而加入CNMC相位平滑算法后,各频率定位结果稳定性均有提升,定位误差明显减小,减小量在1 m左右。
图2给出了7个跟踪站连续5 d各频率E方向、N方向、U方向RMS值的平均值。
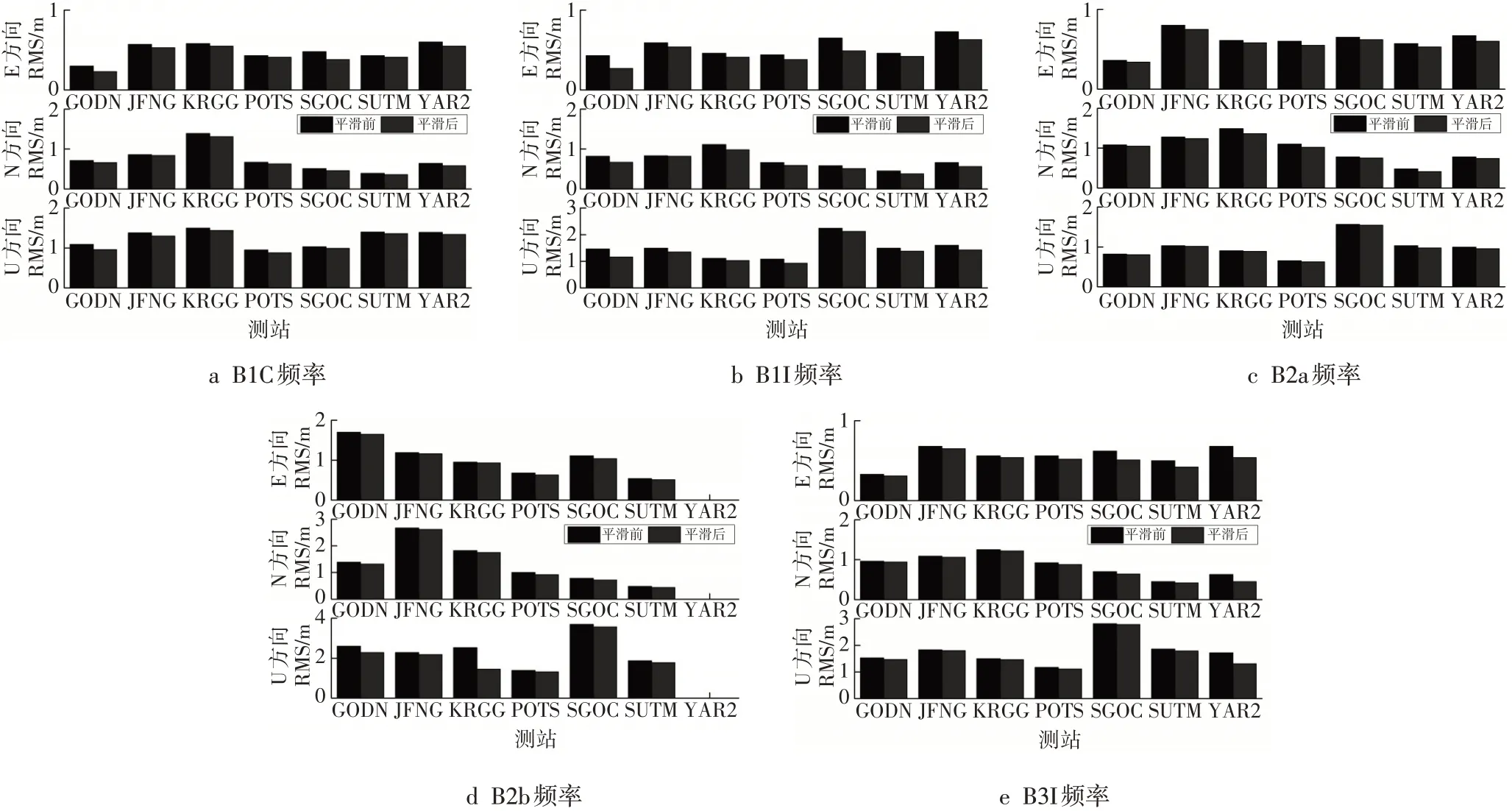
图2 各测站多天不同频率单频伪距单点定位RMS值平均值
如图2所示,在平滑前除个别跟踪站外,B1C、B1I和B3I单频伪距单点定位E方向和N方向定位精度优于1 m;U方向定位精度优于2 m;B2a频率E方向定位精度优于1 m;N方向定位精度优于2 m;U方向定位精度优于3 m;B2b频率E方向和N方向定位精度优于2 m;U方向定位精度优于3 m。加入CNMC相位平滑算法后,各频率定位精度有所提升,但提升量并不明显,在0~0.1 m之间。
进一步分析加入NMC相位平滑算法后各频率单频伪距单点定位精度的定量提升,表1给出了多个跟踪站多天定位精度的平均值以及定量提升值。

表1 单频伪距单点定位平均定位精度以及提升量统计
如表1所示,未加入NMC相位平滑算法前,B1C、B1I、B2a、B3I 4个频率伪距单点定位E方向和N方向定位精度优于1 m;U方向定位精度优于2 m;B2b频率伪距单点定位E方向和N方向定位精度优于1.5 m;U方向定位精度优于2.5 m;加入NMC相位平滑算法后,各频率定位精度都有所提升,B1C、B2a、B2b、B3I 4个频率3个方向定位精度提升量在2%~10%之间,B1I频率3个方向定位精度提升量在10%~15%之间。
2.3 双频伪距单点定位结果分析
图3给出了2种双频伪距单点定位误差时间序列,以POTS站第310 d数据解算结果为例。
如图3所示,未加入NMC相位平滑算法前,双频组合有效削弱了电离层延迟对定位精度的影响,但将观测噪声放大,导致定位误差要大于单频伪距单点定位误差,B1C/B2a组合伪距单点定位误差小于B1I/B3I组合。加入NMC相位平滑算法后,2种双频组合伪距单点定位结果更加稳定,定位误差明显减小,B1C/B2a组合伪距单点定位误差E方向和N方向减小量在1 m左右;U方向减小量在2 m左右;B1I/B3I组合伪距单点定位误差E方向和N方向减小量在2 m左右;U方向减小量在4 m左右。

图3 POTS测站第310天不同双频组合伪距单点定位误差序列
图4给出了7个跟踪站连续5 d两种双频组合E方向、N方向、U方向RMS值的平均值。
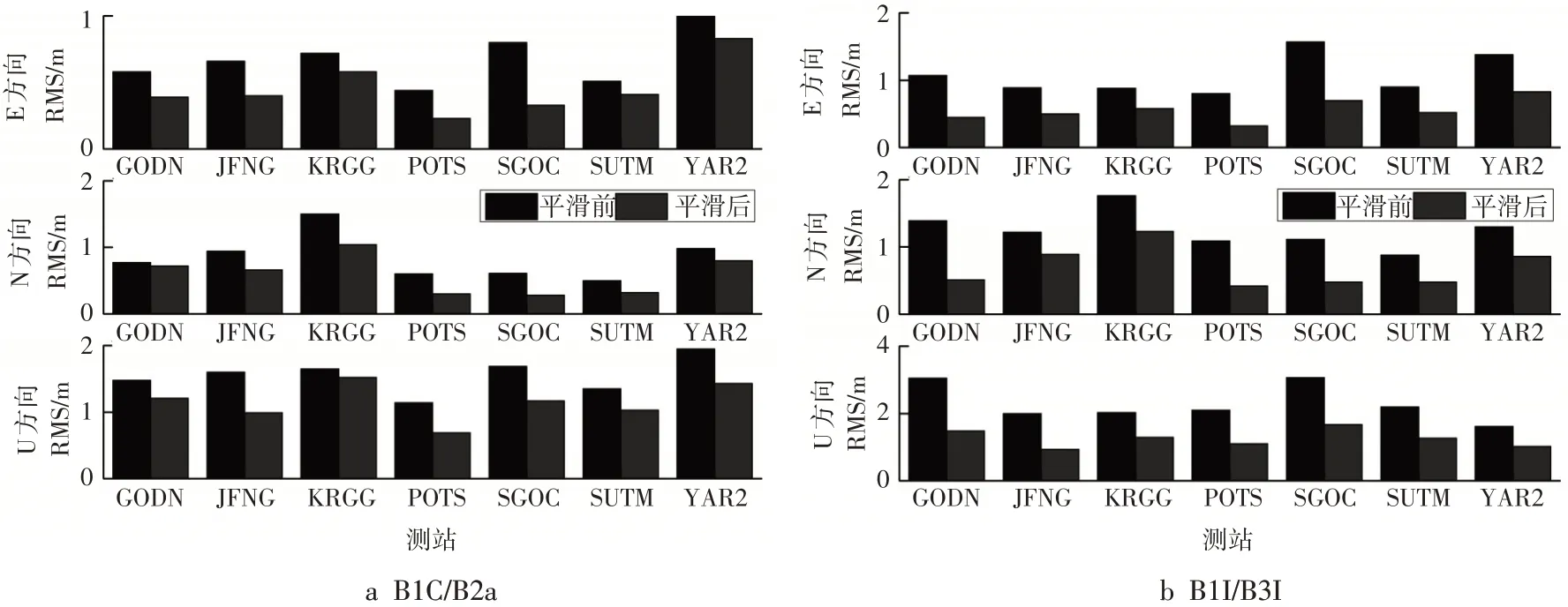
图4 各测站多天不同双频组合伪距单点定位RMS值平均值
如图4所示,未加入NMC相位平滑算法前,除个别测站外,B1C/B2a组合伪距单点定位E方向和N方向定位精度优于1 m;U方向定位精度优于2 m;B1I/B3I组合伪距单点定位E方向和N方向定位精度优于2 m;U方向定位精度优于3 m。加入NMC相位平滑算法后,各测站定位精度均有较明显提升,定位精度提升值在0.1~2 m之间。
进一步分析加入NMC相位平滑算法后两种双频组合伪距单点定位精度的定量提升,表2给出了多个跟踪站多天定位精度的平均值以及定量提升值。

表2 双频伪距单点定位平均定位精度以及提升量统计
如表2所示,未加入NMC相位平滑算法前,B1C/B2a组合伪距单点定位E方向和N方向定位精度优于1 m;U方向定位精度优于2 m;B1I/B3I组合伪距单点定位E方向和N方向定位精度优于1.5 m;U方向定位精度优于2.5 m。加入NMC相位平滑算法后,2种双频伪距单点定位精度有较明显提升,B1C/B2a组合伪距单点定位3个方向定位精度提升量在30%~35%之间,B1I/B3I组合伪距单点定位3个方向定位精度提升量在40%~50%之间。
3 结语
为详细分析CNMC相位平滑算法对BDS-3伪距单点定位性能的提升,在全球范围内均匀选取7个可以接收到BDS-3多频信号的MGEX跟踪站,分别进行了伪距单点定位与CNMC相位平滑伪距单点定位实验,并分析了5种单频与2种双频组合伪距单点定位结果。
1)CNMC相位平滑算法能提升BDS-3伪距单点定位结果的稳定性,使各频率伪距单点定位误差有明显的减小。
2)对于单频伪距单点定位,CNMC相位平滑算法对B1C/B2a组合伪距单点定位精度的提升量优于另外4种频率单频伪距单点定位精度,对B1I定位精度的提升量在10%~15%之间,对外4种频率单频伪距单点定位精度的提升量在2%~10%之间。
3)对于双频组合伪距单点定位,CNMC相位平滑算法对B1I频率伪距单点定位精度的提升量优于B1I/B3I组合伪距单点定位精度,对B1C/B2a组合定位精度的提升量在30%~35%之间,对B1I/B3I组合伪距单点定位精度的提升量在40%~50%之间。
4)CNMC相位平滑算法对伪距单点定位精度的提升量与观测噪声有关,对双频组合伪距单点定位精度的提升量明显优于单频伪距单点定位精度。
随着对BDS-3定位性能的深入研究,相位平滑算法对定位精度的影响将会受到更多的关注,下一步继续研究。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
导航定位学报(2015年2期)2015-06-05 09:27:38