基于历史状态的初步驾驶意图识别模糊推理算法
2022-10-12 08:26马佳涛陈宇峰张金亮彭国生向郑涛
湖北汽车工业学院学报 2022年3期
马佳涛,陈宇峰,张金亮,彭国生,向郑涛
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
随着汽车工业的发展,汽车智能化是发展趋势,精准获取驾驶员的驾驶意图对整车控制系统提升车辆行驶安全性、车辆动力性和经济性具有重要的意义[1-3]。由于驾驶员的驾驶意图不仅取决于驾驶行为,还取决于车辆所处的驾驶环境,比如车辆在下坡时,即使没有踩油门车辆依旧处在加速环境中,初步驾驶意图由驾驶员的行为与车辆所处的环境共同影响,具体分为加速、减速、起步和巡航4种驾驶意图。而结合车速等环境与驾驶员共同影响的输入数据进行初步驾驶意图判断,将能够为后续精准驾驶意图判断提供基础。文献[4]中使用模糊控制器,通过加速踏板开度、加速踏板开度变化率识别加速意图,减速踏板开度、减速踏板开度变化率、车速识别制动意图,识别效果优秀。文献[5]中对驾驶员驾驶风格进行区分,结合速度、加速度、加速踏板开度、加速踏板开度变化率对驾驶意图进行识别,识别结果良好。文献[6]中通过自测数据建立用于驾驶员驾驶意图识别的双层隐马尔科夫链模型结构,并在离线训练中取得较好识别结果。文献[7]中使用模糊控制器制定24条详细规则细分7种具体驾驶意图并在城市混合动力车的驾驶数据上进行验证,取得良好效果。文献[8]中将制动分为轻度制动、中等强度制动、紧急制动并对其进行定义,通过制动踏板开度与制动踏板开度变化率对制动意图识别,取得较好结果。文献[9]中基于当前状态运用模糊推理在NEDC(new european driving cycle)工况下取得较好的初步驾驶意图识别效果。上述研究取得一定的识别效果,但缺乏对最新世界主要地区通用工况WLTC(world light vehicle test cycle)和CLTC(China light-duty vehicle test cycle)工况的驾驶意图识别,需要验证现有算法是否适用。文中提出基于历史状态的模糊识别算法,使用带有“记忆”功能的模糊控制器,对WLTC 和CLTC工况进行初步驾驶意图识别。
1 初步驾驶意图识别算法
1.1 基于当前状态的初步驾驶意图识别算法
文献[9]中基于当前状态初步驾驶意图识别算法在NEDC 工况下的识别结果如图1所示,驾驶意图-1、0、1、2分别表示减速意图、起步意图、加速意图和巡航意图。通过后一时刻的速度曲线来推断此时驾驶员的驾驶意图,识别结果较精准,数据加速、巡航、减速识别率为100%。
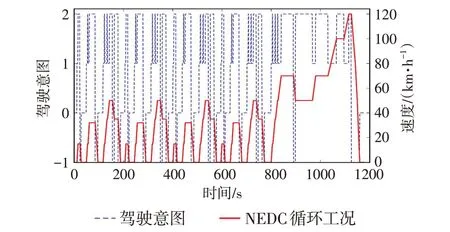
图1 基于当前状态算法对NEDC工况识别结果
模糊控制算法在处理复杂的非线性问题时具有优势,基于当前状态算法对于NEDC工况中无波动速度巡航等理想数据具有较好的识别效果,而对于有波动速度的巡航及考虑历史状态的起步、巡航等意图识别时,识别效果较差,因此提出基于历史状态的改进初步驾驶意图识别模糊推理算法。
1.2 基于历史状态的初步驾驶意图识别算法
真实驾驶环境中,巡航与起步的意图识别不仅取决于当前的驾驶行为,也需要结合之前的驾驶行为进行综合判断。起步之前为静止状态,起步状态不是瞬时状态而是持续过程状态,而巡航是较长时间的速度保持状态。为识别与历史状态有关联的驾驶意图状态,设计带有记忆功能的模糊控制器,状态转换和流程如图2~3所示。
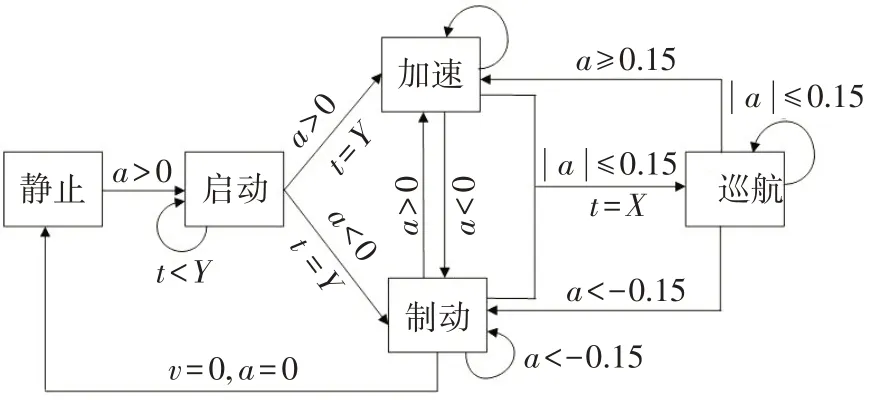
图2 基于历史状态算法状态转换图
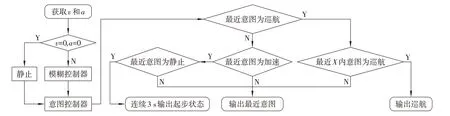
图3 基于历史状态算法流程图
采用基于当前状态算法进行驾驶意图识别时,巡航状态识别效果差,文中进行针对性改进,在模糊算法的模糊接口输出处添加状态记忆模块。在判断启动状态时,需要确定前一时刻为静止状态且当前为加速状态,同时设置启动窗口Y,使车辆在进入启动状态时保持该状态,符合汽车的启动过程。在判断巡航状态时,设置记忆窗口X,当车辆加速度(-0.15~0.15 m·s-²)达到X时,则判断当前状态为巡航驾驶意图。
2 实验结果及分析
2.1 标准工况识别结果及分析
基于历史状态算法参数Y和X都为3 s 时,模糊规则、速度和加速度隶属度函数与基于当前状态算法一致。多数车辆的启动加速度约为2.8 m·s-²,3 s可使车速从0达到25~35 km·h-¹,符合正常驾驶习惯,因此Y取3 s、X取3 s是实验优化后的结果。
2.1.1 标准工况识别结果
不同算法对WLTC工况和CLTC工况的初步驾驶意图识别结果如图4~5 所示。驾驶意图使用模糊算法计算得出,-2、-1、0、1、2、3 分别表示未识别、减速意图、静止、起步意图、加速意图、巡航意图。从图4~5可以看出:基于当前状态算法有多处未识别情况和大量巡航状态识别错误的结果,在WLTC 工况下188 处未正确识别驾驶意图,识别率为89.56%;在CLTC 工况下169 处未能正确识别驾驶意图,识别率为90.61%。在速度瞬时小幅波动和加减速转换过程中,a为0 m·s-²左右,根据模糊规则,高概率判定为巡航状态,因此大量识别为巡航意图,出现“突刺”现象。此外基于当前状态算法将所有静止状态识别为起步状态,而车辆真正起步时没有正确识别。X取3 s 时,基于历史状态算法无未识别情况出现,且起步意图全部识别,巡航意图识别率更高,“突刺”现象明显减少,因为记忆窗口过滤大量加减速转换时出现的巡航状态,使得结果相对平缓。基于历史状态算法在WLTC与CLTC工况下识别结果错误的驾驶意图分别为58处和50处,识别率分别为96.78%和97.22%,分别比基于当前状态算法提高8.07%和7.30%。

图4 WLTC工况算法识别结果对比
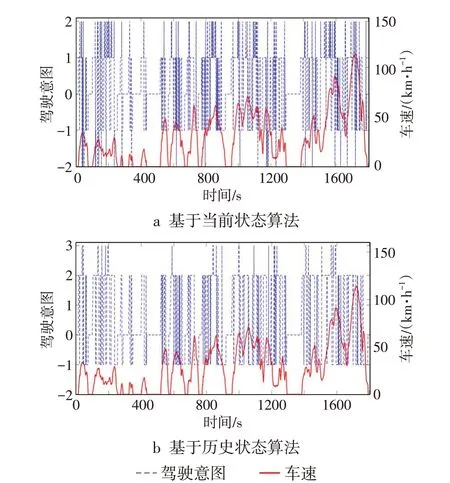
图5 CLTC工况算法识别结果对比
2.1.2 记忆窗口对识别效果的影响
判断巡航等连续状态的意图时,通过当前时刻与前X时刻的关系来判断当前时刻的驾驶意图,X对识别结果有重要影响。在WLTC 和CLTC 工况下,取X为1~8 s,实验结果如表1所示。

表1 基于历史状态算法记忆窗口对识别率的影响
当X从1 s逐步增加到3 s时识别率逐步提高,而当X从4 s增加到8 s时识别率逐步降低。当X为1~2 s 时,识别窗口太小,对历史状态考虑不足,速度瞬时小幅波动和加减速转换的情况被识别成巡航意图,使得识别率提高有限。当X为4~8 s时,虽然能较好地区分巡航、速度瞬时小幅波动和加减速转换的情况,但窗口过大使得巡航意图识别延迟过大,即判断为巡航意图之前的时刻均会被判断为加速或者减速状态。X越大,识别延迟现象越明显,因此识别率逐渐降低。当X为3 s 时,既能较好地区分巡航、速度瞬时小幅波动和加减速转换的情况,又能在延迟较小的情况下识别出巡航意图,识别率最高。
2.2 仿真数据识别实验分析
以智能座舱实验台架为基础,通过Carsim 搭建车辆模型与仿真场景,在MATLAB/Simulink中通过方向盘、踏板等模拟输入数据并记录,如图6 所示。对数据进行初步驾驶意图识别仿真,基于当前状态算法结果如图7a所示,识别错误14处,识别率为96.32%;基于历史状态算法结果如图7b 所示,134~137 s识别错误,其他均能准确识别,识别率为98.95%,比基于当前状态算法识别率提高2.73%。

图6 模拟驾驶环境
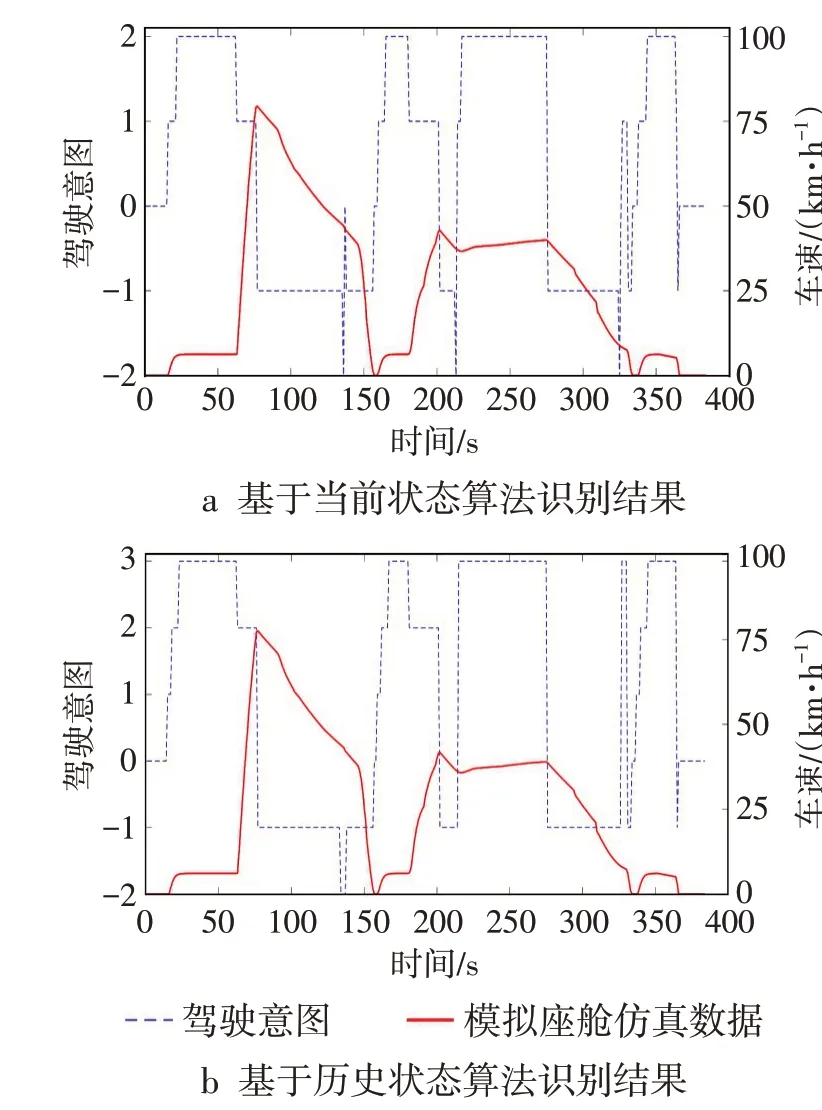
图7 模拟座舱仿真数据识别结果
3 结论
通过在模糊控制器输出口添加“记忆窗口”,提高模糊算法对连续时间状态驾驶意图识别的正确率。对比基于历史状态算法与基于当前状态算法对CLTC 工况、WLTC 工况和驾驶座舱模拟驾驶数据的识别结果,表明在记忆窗口为3 s时,改进模型识别率较高,为后续精准驾驶意图判断提供基础。
猜你喜欢
车主之友(2022年6期)2023-01-30
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
电站辅机(2021年4期)2021-03-29
计算机工程(2020年3期)2020-03-19
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
中国听力语言康复科学杂志(2019年3期)2019-06-24
中国交通信息化(2018年3期)2018-06-13
黄河之声(2017年13期)2017-01-28