TTC与安全时距协同AEB控制策略
2022-10-12 08:26张宇丰张友兵周奎李凯曹恺
湖北汽车工业学院学报 2022年3期
张宇丰,张友兵,周奎,李凯,曹恺
(1.湖北汽车工业学院,湖北 十堰 442002;2.东风悦享科技有限公司,湖北 武汉 430056)
道路安全事故大多发生在跟车行驶情况下[1],如何避免或减轻碰撞程度成为研究热点。车辆在非自适应巡航情况下行驶时,如遇突发危险情况,自动紧急制动(autonomous emergency braking,AEB)系统会主动进行刹车来避免或减少追尾等碰撞事故的发生。AEB系统自1999年由德国汽车制造商奔驰公司提出以来[2],其重要性越来越受到全世界的关注。目前世界上流行的TTC 算法具有良好的避撞性能,但在两车速度相近且距离较近时,其算法无法很好地保证行驶安全性。文献[3]利用正交实验法、聚类分析法对驾驶员进行分类,拟合不同驾驶员面对危险情况的反应曲线,制定相应的TTC算法阈值。文献[4]提出基于单目视觉估算算法来估计TTC 值。文献[5]利用单目觉传感器,根据图像坐标系中车辆位置和速度计算TTC值,进而判断是否需要施加制动。文献[6]基于真实交通工况中驾驶员的紧急行为构建了危险估计模型,开发了两级预警两级制动的避撞策略。文献[7]通过测试不同车型AEB系统性能,得出不同车型、不同制动执行器的TTC 设定值。上述研究均基于TTC 模型进行延展考虑,未对实际某一特定场景进行细化深究,比如考虑跟车、会车、变道和转向时的场景。为此文中着重研究近距离稳定跟车工况,提出了基于TTC与安全时距协同AEB控制策略,并采用Car-Sim与Simulink联合仿真进行验证。
1 跟车工况下危险预警
1.1 跟车工况
正常跟车行驶工况下,目标车辆出现加速、转向、刹车或急停等情况时,自车与目标车辆会发生碰撞或其他危险,因此提出以TTC 算法为主、安全距离为辅的危险估计模型。由于不同路况下车辆行驶速度不一,建立自车驾驶员反应模型,预测目标车辆采取最大减速度的制动措施来建立安全距离模型。通过考虑极端危险工况下的制动情况,提高AEB系统的安全指数,尽可能避免碰撞。
以目标车辆速度、自车驾驶员反应时间、自车车辆速度作为危险估计模型的输入信号,计算跟车工况下TTC 预警与制动阈值。假设目标车辆突遇危险情况需要在最短时间内刹停,会有一段制动距离。假定在路面摩擦系数为0.85的情况下,车型为C级车,正常荷载,不同车速下的制动距离见表1。
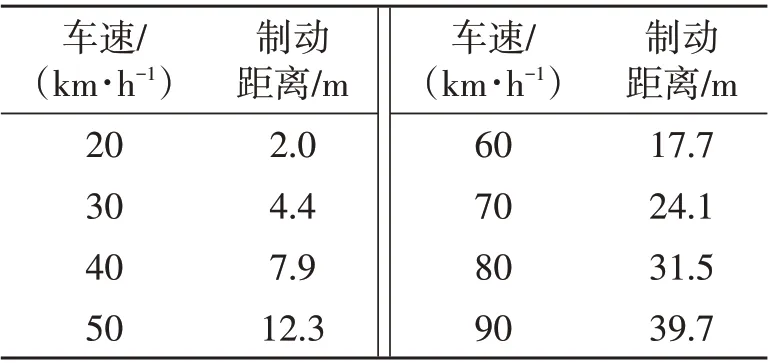
表1 车速与制动距离关系
1.2 驾驶员反应时间
AEB 系统根据两车行驶状态计算出当前两车碰撞时间,然后根据设置的阈值决定是否提醒驾驶员以及主动介入。驾驶员在驾驶车辆时,通过分析客观环境做出判断和反应,速度、时间、道路、声音以及所在位置都是考虑因素。驾驶员在精神集中的情况下,以40 km·h-1车速行驶时,反应时间均值为1.34 s[8],这是对驾驶员进行简单实验得到的数据,而在现实场景中,多方面因素掺杂,反应时间会略长。针对上述影响因素将驾驶员分为4 类人群[3],将各类驾驶员按照人群比例进行统计[9],具体数据如表2 所示。由于不着重研究各类驾驶员反应时间,将4 类驾驶员归为一种驾驶员,各项系数取其加权平均值:
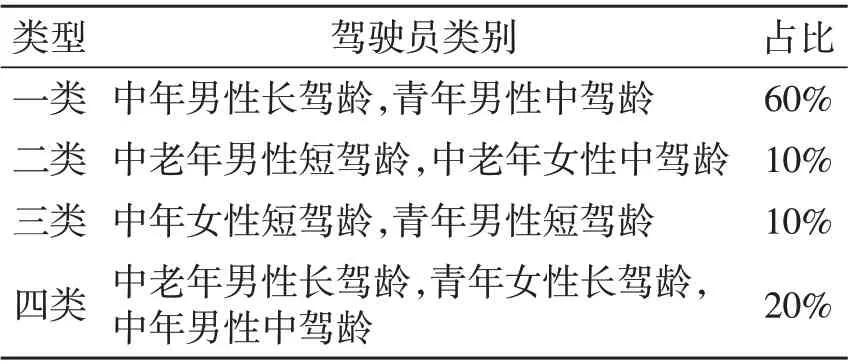
表2 驾驶员分类

式中:m取4;T为驾驶员在不同车速下的反应时间,以此制定TTC 算法阈值;Ti为各类驾驶员在人群中的权重比例;Wi与Bi为4类驾驶员各反应时间曲线系数;v为车辆速度;Ci为机械传动延迟。
1.3 安全距离模型
TTC算法只适用于相对速度比较大的工况,若前后车辆以相同速度行驶,且相对距离较近,TTC算法无法计算出碰撞时间,此时若前车突然刹车,很容易引起碰撞。因此在近距离跟车工况下,采用考虑前车最大制动减速度的安全距离模型。不同车速下,考虑目标车辆的最短制动距离,自车行驶距离不大于两车间距和目标车辆刹车距离之和,如图1 所示。Hsafe为自车与目标车辆设定的安全间距;Hbrake为目标车辆的最短刹车距离;Hstop为最终两车停止后的距离;Hdis为整个过程中自车行驶距离。根据紧急避撞策略可得:

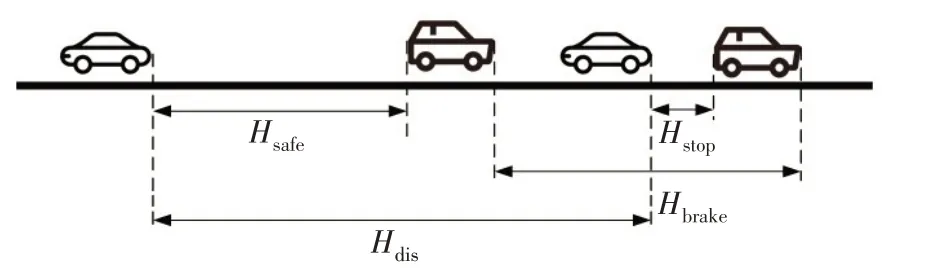
图1 跟车场景中安全距离模型
即
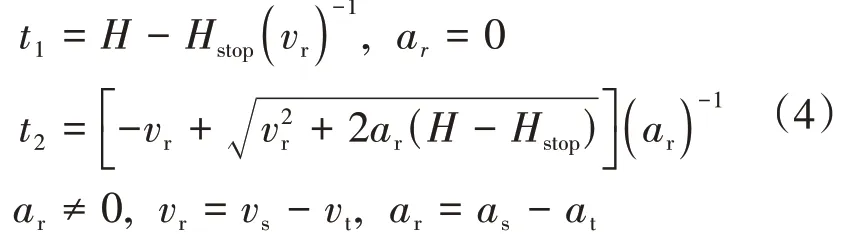
式中:vt为目标车辆速度;vs为自车速度;vr为两车相对速度;at为目标车辆加速度;as为自车加速度;ar为两车相对加速度;t1和t2为两车相对加速度在不同情况下计算出的TTC值。
1.4 风险预警设计及控制流程
两车相对速度较大时,根据驾驶员是否反应做出相应操作来决定AEB 系统是否介入。如图2 所示,根据当前车辆行驶状况计算跟车情况下的TTC值及其各级阈值。其中TTC1定义为预警阈值,其值为1.5 倍驾驶员反应时间;TTC2为制动介入阈值,其值由安全模型计算得到。
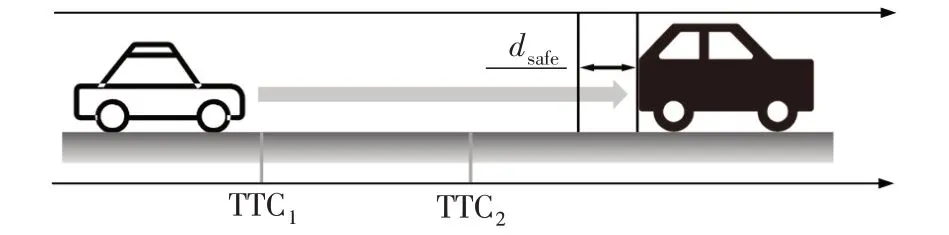
图2 不同TTC值表征车辆状态
车辆行驶过程中,当TTC 值介于TTC1与TTC2之间时,启动声音及图像预警;小于TTC2时则系统主动介入采取相应的制动措施。当两车车速相同且距离较近时,TTC 值无法计算,由安全距离模型来决定是否全制动介入,整体控制流程见图3。
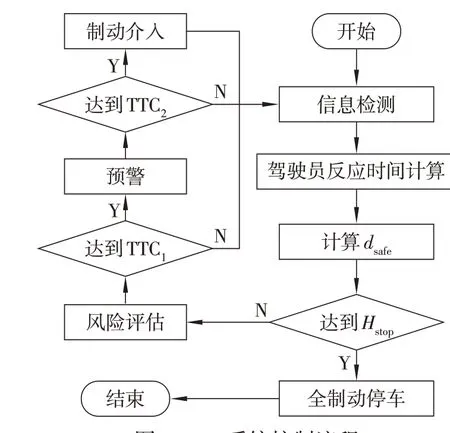
图3 AEB系统控制流程
2 仿真验证及分析
2.1 场景搭建
基于CarSim 分别搭建目标车辆静止、匀速及减速的仿真工况,联合Simulink 建立AEB 控制算法。选取长为800 m、路面附着系数为0.85的直道作为车辆行驶道路。
整个模型包括CarSim 车辆模型、TTC 算法模型、驾驶员反应时间模型、安全车距模型及相应风险评估模型,自车车型选择为C 级车,目标车为D级SUV。通过CarSim 车辆模型输出车辆间相对距离、相对速度和自车车速来计算出车辆碰撞时间和驾驶员反应时间,划分出预警及制动介入时间。在车速相同且相对距离较近时,以目标车辆最短制动距离为标准来制定自车与目标车的安全距离阈值,一旦低于安全距离阈值时输出最大制动减速度实现车辆避撞。
根据主动安全ADAS 系统试验方法(C-NCAP管理规则2021 版),AEB 测试场景分为CCRs 与CCRm 工况,CCRs 工况为前车静止,CCRm 工况为前车行驶速度为20 km·h-1,如图4所示。碰撞位置测试中,自车左右偏置率默认为50%。在CarSim中搭建相应仿真测试场景,见图5。

图4 AEB测试场景
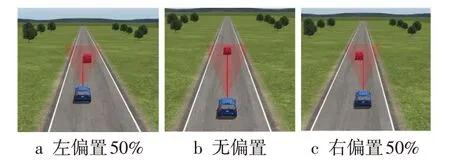
图5 CarSim仿真场景搭建
2.2 测试流程
选择2种测试工况验证算法的有效性:车辆正常行驶情况下,自车车速大于前车速度,验证TTC算法的有效性,之后测试加入安全距离算法进行协同控制后的效果并对比分析;两车在等速近距离跟车情况下,验证在TTC算法失效后安全距离算法是否能进行有效避撞。
2.3 仿真结果分析
1)场景1 选取自车车速为50 km·h-1,目标车车速为20 km·h-1,两车相距46 m。仅使用TTC算法的测试结果见图6,自车以当前速度行驶时,2.6 s 时自车发出警告,持续报警1.1 s 后,达到TTC制动阈值,此时自车车速为50 km·h-1,产生-6 m·s-2减速度,减速过程中,由于自车车速较高,减速度在5 s 左右达到-7 m·s-2,在7.2 s 左右达到-8 m·s-2,8.3 s 时自车停止,达到避撞效果。期间自车车辆与目标车辆相对距离最短为2.5 m 左右,此距离在真实交通情况下十分危险,因此引入安全距离算法进行同样场景测试,测试结果见图7,4.8 s 时触发极限安全距离阈值,安全模型介入,将制动减速度提升至-8 m·s-2,最终在7.8 s 时自车停止,比单一TTC算法测试结果提前了0.5 s左右,两车之间相对距离最短约为5 m,达到了更好的避撞效果。
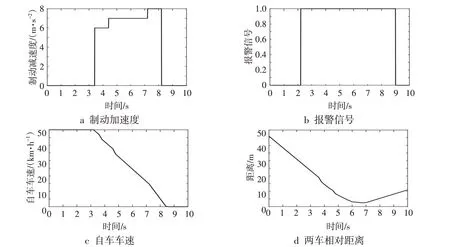
图6 AEB场景1中TTC算法测试结果
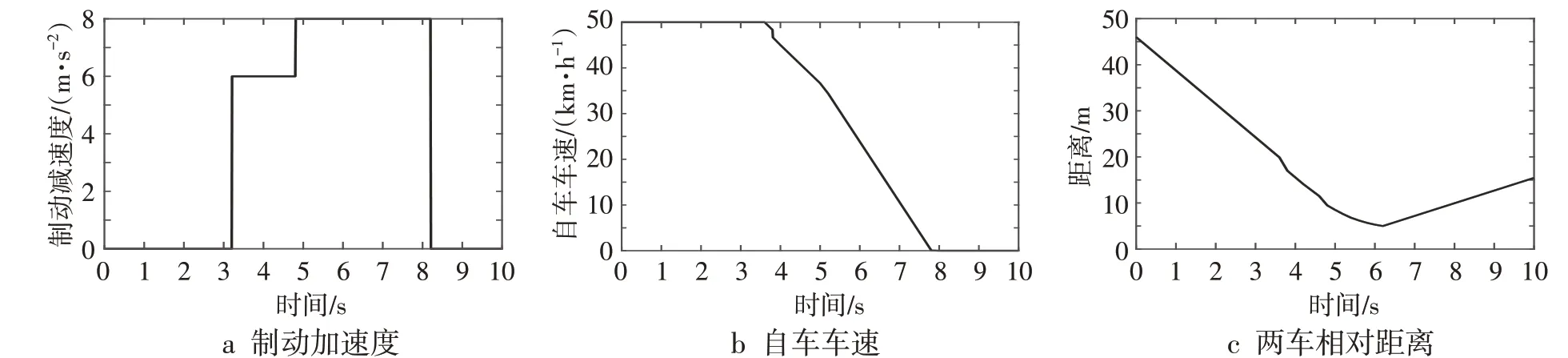
图7 AEB场景1中协同算法测试结果
2)场景2 选取自车与目标车车速均为40km·h-1,两车相距8 m,在TTC 算法失效情况下得到的测试结果如图8 所示。由图8a 可知,安全距离模型在0.2 s 时介入系统,车辆全制动,并在3 s 时刹停。TTC算法在车辆全程行驶过程中未介入系统,如图8a~b 所示,此时TTC 算法失效。协同控制算法达到了近距离跟车情况下的避撞效果。
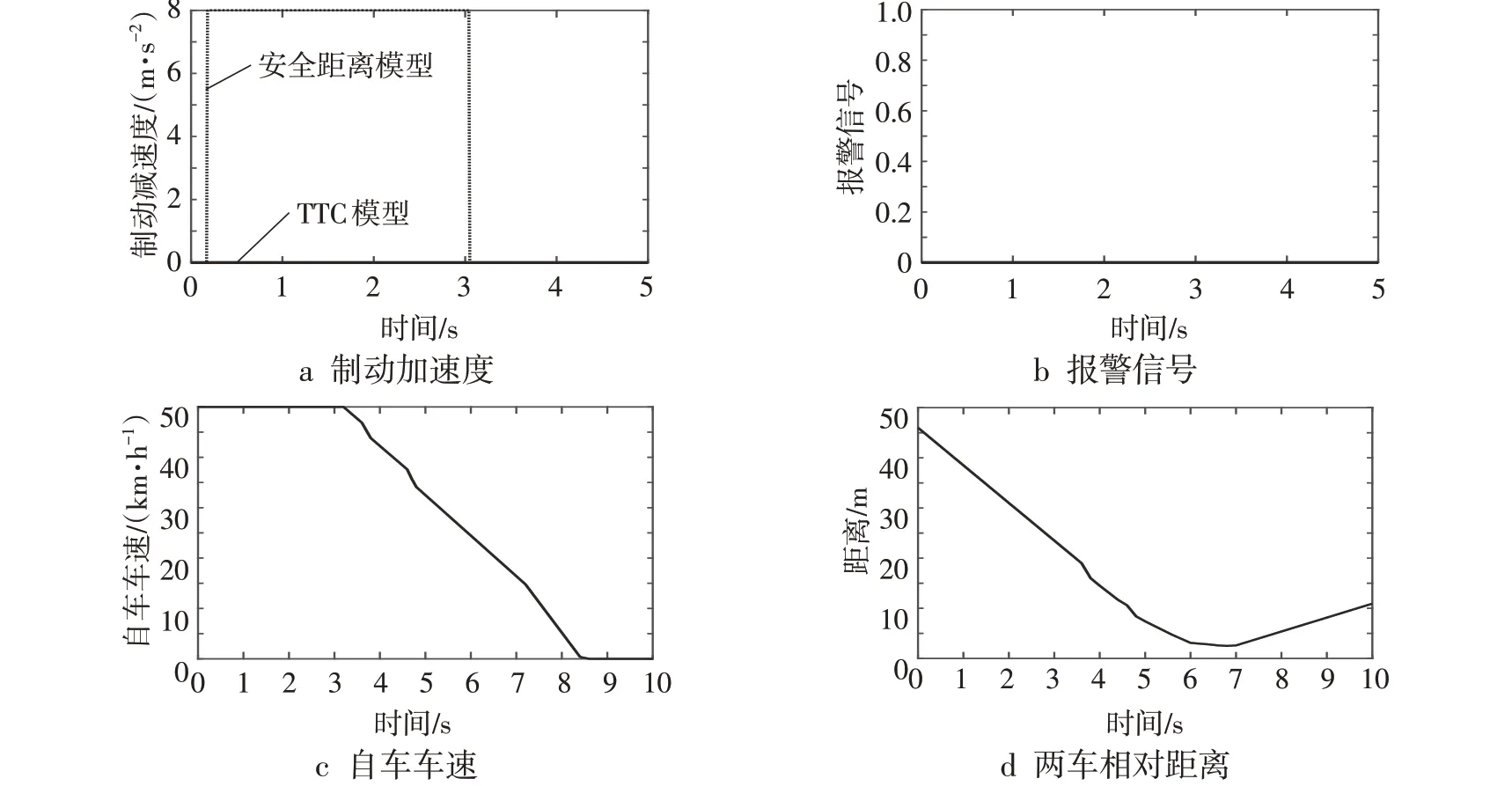
图8 AEB场景2中协同算法测试结果
3 结论
提出基于TTC 算法与安全距离协同控制算法并进行仿真验证,得到如下结论:1)考虑驾驶员在不同车速下的反应时间,制定相应的TTC报警阈值及制动阈值,能更好地反映驾驶员及车辆行驶的状况;2)协同控制算法能在近距离跟车工况下主动介入车辆制动,有效保护车辆及乘客安全;3)在Car-Sim中设置工况时考虑车辆左右偏置50%的场景,更能体现实际路况上车辆发生危险的可能性,为研究控制算法在场景测试上提供了新方向。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
制造技术与机床(2019年9期)2019-09-10
西南交通大学学报(2018年6期)2018-12-18
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
河北遥感(2017年2期)2017-08-07
衡阳师范学院学报(2016年3期)2016-07-10
公民与法治(2016年4期)2016-05-17