
基于Simulink的多电飞机电气系统运行特性研究
2022-08-19 03:08杜辰韬郑嘉扬
微电机 2022年7期
杜辰韬,郑嘉扬
(南京航空航天大学,南京 211100)
0 引 言
多电飞机中的二次动力系统中大部分以电能的形式传输,这可以大大降低系统重量和成本,提高飞机的维护性和可靠性。电气系统是多电飞机的中枢系统,而随着多电飞机恒功率负载的增多,使得电气系统的结构更加复杂,因此建立用于研究分析飞机电气发电机系统的数学模型十分有必要[1]。
本项目采用典型的高压直流电力系统稳定性分析:通过对电容、负载功率等电路参数以及闭环控制参数的改变研究系统的稳定范围。在负载功率需求发生波动时,采用超级电容及储能电池相结合支撑电压,利用超级电容器功率密度高和循环寿命长的优点,实现对蓄电池充放电过程的优化控制,延长蓄电池使用寿命,提高储能的技术经济性[4]。在Matlab/Simulink环境中搭建电气系统,分别搭建270 V高压直流发电机、电动泵和电力作动器负载、电池单元充放电系统模型,并分析了并网电气系统在不同运行自控下的稳定性,再进行了并网实验。为多电飞机提供测试电气部分的实验环境,为多电飞机的构建提供可靠的测试方法。
1 HVDC270V主电源建模及控制策略
1.1 永磁同步发电机建模
永磁同步发电机(PMSG)具有损耗小、可靠性强、效率高等优点,应用场合十分广泛。本文利用恒转速输入的永磁同步发电机,作为多电飞机电气系统270 V的高压直流主电源[5]。在理想情况下,忽略永磁电机的铁心饱和、不计铁耗,忽略涡流和磁滞损耗、认为定子绕组电流在气隙中只产生正弦分布的磁势[6]。
运用坐标变换理论,可以得到在同步旋转坐标系下的永磁同步发电机的数学模型[7]。
定子电压方程可表示为
(1)
转矩方程为
(2)
式中,ud、uq为定子电压d、q轴分量,id、iq为定子电流轴分量,Ld、Lq为d、q轴电感分量,ψd、ψq为定子磁链d、q轴分量,ψf为永磁体磁链,R为定子电阻,ωe为电角速度,Te为pn为极对数[8]。
1.2 空间矢量脉宽调制的基本原理和实现
为了使电机输入的三相正弦电压在空间产生圆形旋转磁场,直接按照跟踪圆形旋转磁场的目标来控制PWM电压,即磁链跟踪控制原理。通过电压空间矢量的叠加得到磁链,故称为空间矢量脉宽调制,即SVPWM[9]。
由于三相PWM整流器的每个桥臂有两个开关管,同一个桥臂只能有一个器件导通,共8种状态,(如图所示)。8种状态用各桥臂通断状态的组合表示为6个非零的空间矢量 (001)、 (010)、 (011)、 (100)、 (101)、 (110)和2个零矢量 (000)、 (111)。
SVPWM的实现方法就是,当电压空间矢量旋转到某个扇区时,控制整流器中的开关管的开关状态和开断时间,就可以控制交流测的电压正弦化[10]。
在每个周期Ts中控制电压矢量的作用时间,从而控制合成矢量。以扇区Ⅰ为例,根据平衡等效原则得:
(3)
式中,T4、T6、T0分别为U4,U6和零矢量U0(U7)的作用时间。在两相静止参考坐标系(a,β)中,令Uout和U4间的夹角是θ,由正弦定理可得
(4)
因为有效电压矢量幅值|U4|=|U6|=2Udc/3,代入式(4)可得:
(5)

1.3 PMSG-PWM整流系统的矢量控制
PMSG-PWM整流系统采用外电压内电流的双闭环控制系统,由式可知,由于ψf恒定,当id=0时控制iq即可对电机进行控制[11]。
并且为了进一步实现解耦,采用前馈补偿的方式消除耦合,即将ωeLqiq,-ωeLdid+ωeψf作为前馈补偿。总体的控制框图如图2所示。

图1 电压空间矢量示意图
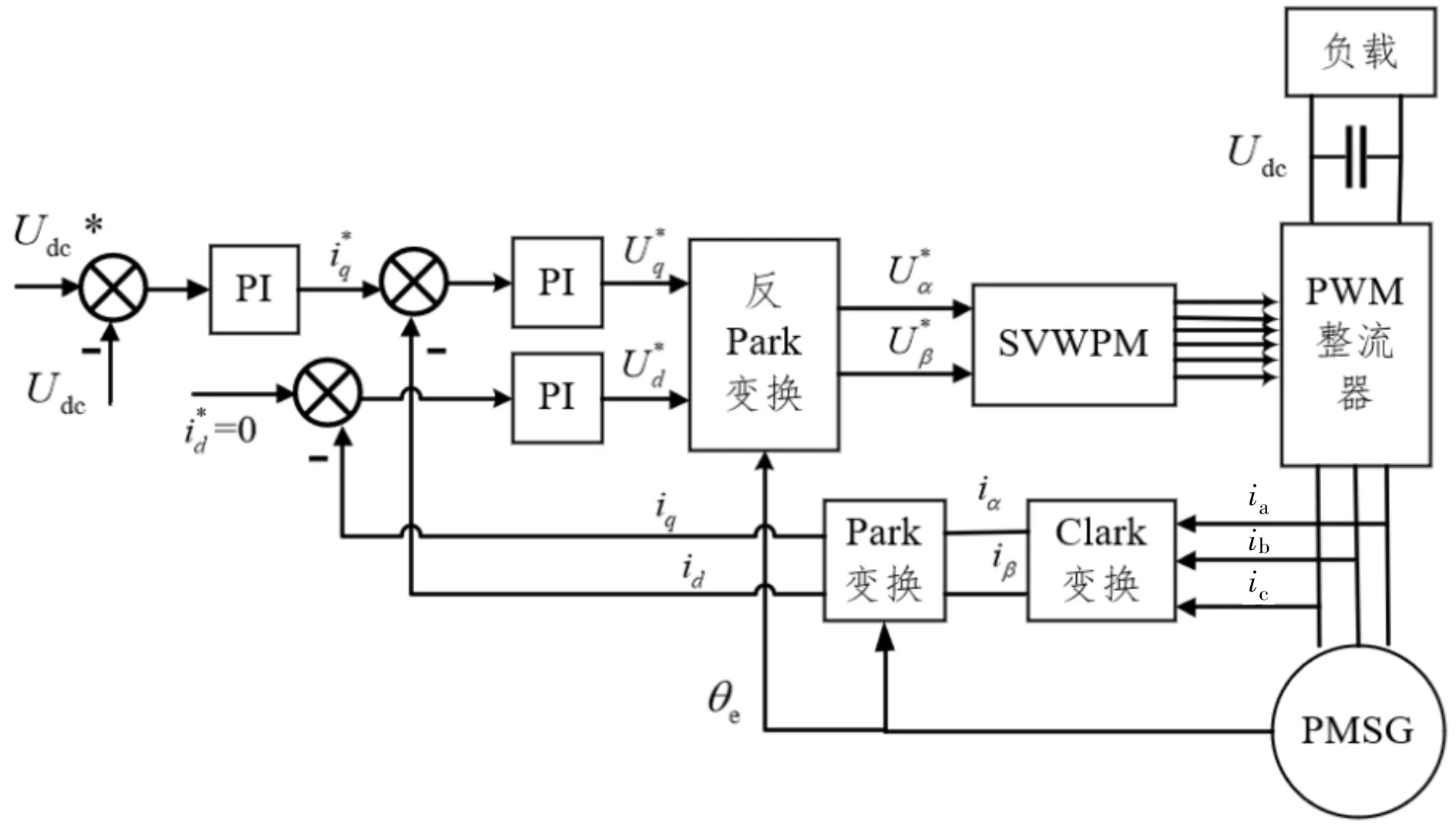
图2 PMSG-PWM系统矢量控制图
2 永磁同步电动机建模及控制策略
在多电飞机负载中,永磁同步电动机(PMSM)应用很广泛,所以本文将搭建电动泵和电力作动器负载系统,以研究多电飞机的负载特性。
永磁同步电机(PMSM)的结构同永磁同步发电机(PMSG),但需要以电动机惯例进行数学建模,规定流入定子电枢绕组的方向为电流的正方向。
PMSM的矢量控制系统为外转速内电流的双闭环控制系统,主要包括以下几个模块:永磁同步电机模块、外速度/内电流环模块、坐标变换模块、空间矢量脉宽调制、逆变器模块、测量模块。整个控制过程与PMSG-PWM系统类似,不同之处在于:在外环,转速给定值n*与转速实际值n的偏差经PI转速调节器调节后,输出q轴定子电流分量给定值。具体参考文献[10-11],这里不再详述。
3 双向DC/DC充放电系统建模与控制
3.1 双向变换器的基本原理和小信号建模
双向直流变换器是将开关管代替单向直流变换器中的二极管[12]。在Buck、Boost、Buck/Boost、Cuk、Zeta、Sepic六种基本单向直流变换器中,将其二极管用开关管来替代,就变为相应双向直流变换器。
本项目中的270/28 V双向DC/DC变换器要求的变比较高,输出功率较大(≥10 kW),经过考虑,选用半桥结构的双向变换器,并使用独立PWM控制方式[13],如图3所示。

图3 半桥变换器电路结构
在升压模式下(Boost),开关管Q1及二极管D2工作,Q2与D1总处于截止状态。此时,仅控制Q1的通断,将蓄电池电压升高至母线电压,给后级负载供电。
在降压模式下(Buck),开关管Q2及二极管D1工作,Q1与D2总处于截止状态。此时,仅控制Q2的通断,将母线电压降低至蓄电池电压,给蓄电池充电[14-15]。
对于控制信号在一个周期内的高低电平,可以得到半桥变换电路的两种工作状态[16],如图4所示。

图4 半桥变换器的两种状态
如图4(a)所示,在电流连续的状态下,一个开关周期内(0,Ts),电感电压vL(t)与电容iC(t)电流分别为
(6)
如图4(b)所示,变换器工作在状态2时,有:
(7)
将变换器中的各变量分解为直流分量和扰动量,作小信号分析,再经过拉普拉斯变换可得:
(8)
联立后消除电流扰动量,可得:
(9)
变换器的闭环控制框图如图5所示。
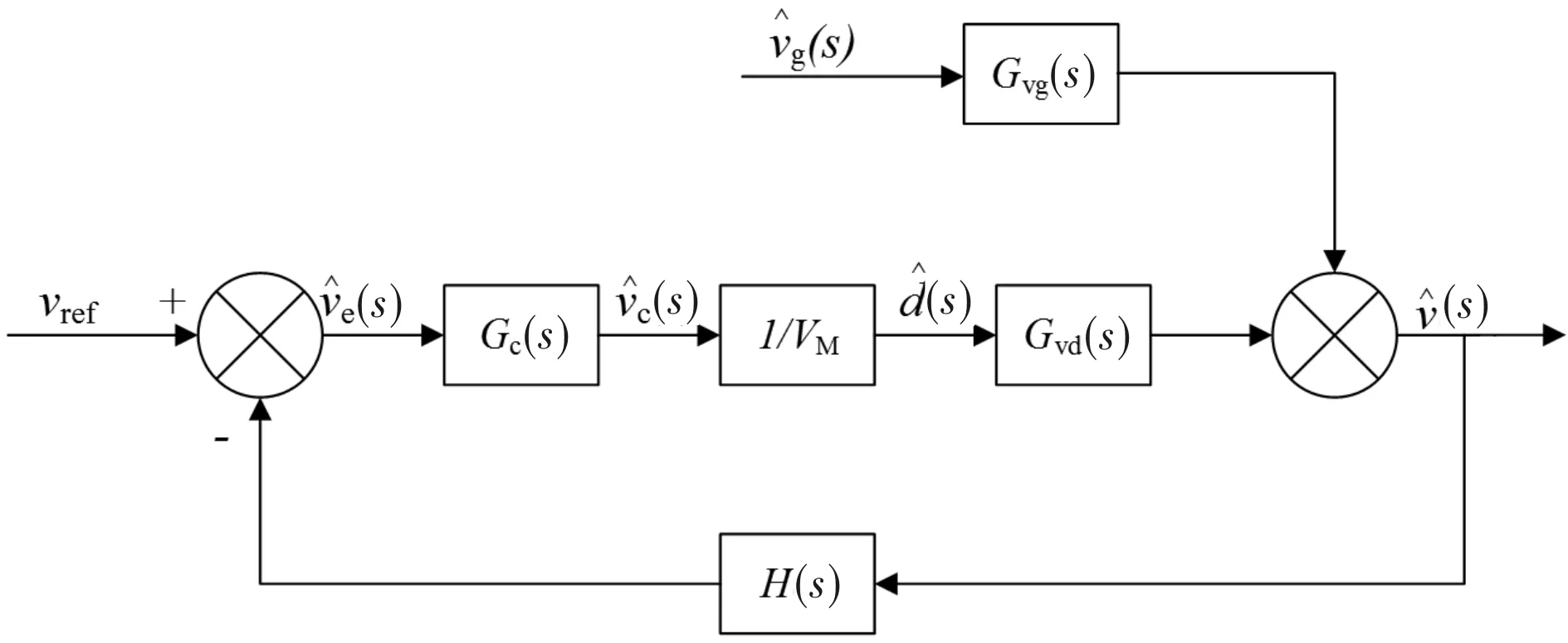
图5 变换器的闭环控制框图
3.2 闭环调节器设计
初步设计的控制器模型为电压单闭环的PI控制[17]。应用后发现控制效果不理想。单电压环控制时,PID参数对于输出的调节效果很不显著,仅仅只能控制系统稳定与否,且稳定性对参数很敏感。
由此,考虑采用两个控制回路级联。对于双环控制系统,要求内环响应速度远大于外环[18]。在变换器回路中,电感电流对于输入信号的传递函数为
(10)
对于一个一阶响应,相比于输出电压的二阶响应,电感电流的动态过程要快得多,适合作为内环被控对象。于是考虑采用输出电压外环,电感电流内环的控制方式。
在接入电机负载时,对于电机不同状态,变换器需要的控制效果不同。故改进传统电压,电流双环中由电压信号调制出电流环基准值的方法,将电机转速和负载情况信号引入变换器,根据电机工作状态给予电流环不同的基准。
电机空载启动时,由于只有转速上升时需要蓄电池输出电流,转速稳定时基本无电流。故将实际转速和额定转速的差值经PD调节器的输出作为电流基准。电机带不同负载时的需求电流不同。故电机带负载时,根据负载情况设置额定电流基准值。
4 电气系统稳定性分析
本文搭建的并网电力系统存在两种工作模式:其一,发电机正常工作,向直流母线输出电压,为电动机负载供能,同时为电池单元充电;其二,发电机由于故障原因无法输出电能,则电池单元切换至输出模式,维持直流母线电压,为电动机负载供能。

图6 多电飞机电气系统结构示意图
PMSM在稳定运行时转速和转矩恒定可以等效成恒功率负载(constant power loads, CPL),而28 V蓄电池单元在充电过程中的电压电流恒定,功率约为2.8 kW,也可以视作恒功率负载(CPL),所以可以将PMSM负载和电池单元等效成一个恒功率负载。
由于恒功率负载具有负阻抗特性,会影响系统的稳定性,故进行分析验证[19-20]。
4.1 电气系统正常工作情况
组网后电气系统正常工作时,系统可以简化为永磁同步发电机(PMSG)输出并联恒功率负载与恒阻性负载,据此分析系统的稳定性。直流侧输出的物理等效模型如图7所示[21]。

图7 正常工作时直流母线等效图
图中,idc其中为直流负载电流,iCRU为PMSG输出电流,iR为恒阻性负载电流,iCPL为恒功率负载输出电流。采用泰勒级数,将PMSG控制电气系统线性得到状态空间表达式形如
(11)
y=C(x0,y0)x+D(x0,u0)u
(12)
其中,状态变量为x=[idiqXeXdXqEdcEdcfiCRUf],输入变量u=[Edcriqr],输出变量为y=Edc,而矩阵A为系统矩阵[22]。为进行系统的稳定性分析,采用李雅普诺夫第一法,即计算系统矩阵A的特征值来验证稳定性。
带入电机参数计算矩阵A的特征值,并选取距离零点最近的为主特征值。固定恒阻性负载为5 kW, 由于Udc=270 V,即负载大小R≈15 Ω,逐渐增加恒功率负载(CPL)的功率值大小。并将系统的主特征值绘制在复平面上,得到图8所示,其中箭头表示CPL增大方向。
图8说明当CPL逐渐增大时,主特征值在复平面的位置逐渐右移,超过虚轴后不再稳定。所以CPL的大小与系统稳定性有着密切的关系。
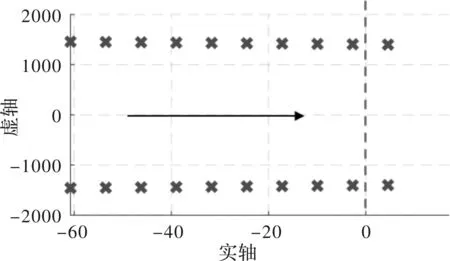
图8 随CPL增加的系统主特征值
现对CPL进行的单变量研究,由仿真结果(如图所示)可知,随着恒功率负载大小的增加,输出波形的最终发生振荡,即发电机会趋于不稳定。从而验证了理论分析,故系统在正常运行时需关注负载的大小,来维持系统的正常运行。

图9 发电机正常工作时系统对CPL变化的响应
4.2 发电机故障情况
当发电机故障时,电池单元单独供电,系统可以等效为28 V蓄电池单元经DC/DC变换器输出并联恒功率负载和恒阻性负载,如图10所示。
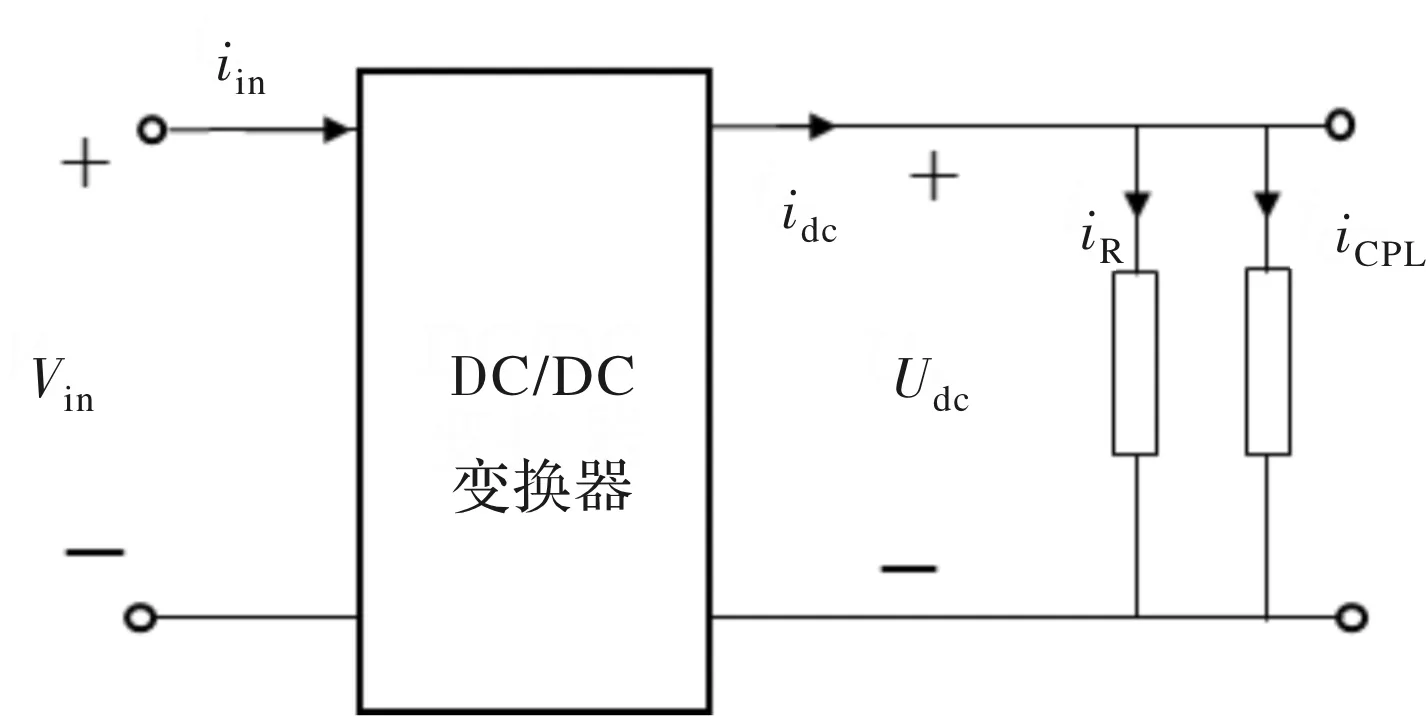
图10 电池单元单独供电时等效图
(13)
(14)
根据经典控制理论中,传递函数H1(s)和H2(s)的极点均需有负实部,系统才是稳定的,故必须满足:
(15)
对CPL进行的单变量研究后,得到结果电压波形图如图11所示。随着CPL的增大,输出波形的超调量和调节时间明显增加,系统趋于不稳定。

图11 发电机故障时系统对CPL的响应
值得注意的是,发电机故障情况下,由于电池单元的负载能力受限,当负载功率到达一定范围时,输出电压由于受限无法保持输出270 V稳态电压。
5 仿真结果
在Matlab/Simulink平台上搭建多电飞机电气系统的仿真模型,其中分为永磁同步发电机、永磁同步电机负载、电池单元三个子系统。对这三个子系统分别进行仿真运行,观测分析参数和模型的可靠性。其次,对并网的电气系统进行仿真运行,分别分析正常工作和发电机故障运行的情况。验证电气系统仿真模型的正确和可靠性。
5.1 永磁同步发电机系统仿真结果
表1给出的是额定转速6000 r/min的永磁同步发电机参数,根据以上参数分析PMSG-PWM整流系统双闭环系统,计算内电流环和外电压环调节器的PI值大小,经调试后得到如表2所示参数。

表1 PMSG参数

表2 PMSG-PWM系统PI调节参数表

使用表2中参数对双闭环PMSG-PWM系统进行仿真运行,得到如图12所示波形结果。

图12 输出直流电压波形图
可见输出电压经过很短的调节时间就稳定在了270 V,响应时间短,且超调量较小。
图13可以看出id在稳定阶段维持在0附近,这与id=0的解耦策略一致。而iq也在很短时间内完成了调节,到达恒定状态。

图13 PMSG-PWM系统iq和id波形图
5.2 永磁同步电机负载仿真结果
本文以永磁同步电机控制系统为核心,搭建了6000 r/min电力作动器和11500 r/min电动泵的仿真模型,作为多电飞机电气系统的负载。
其中6000 r/min电力作动器的参数同永磁同步发电机如表1所示,而11500 r/min电动泵负载参数如表3所示。
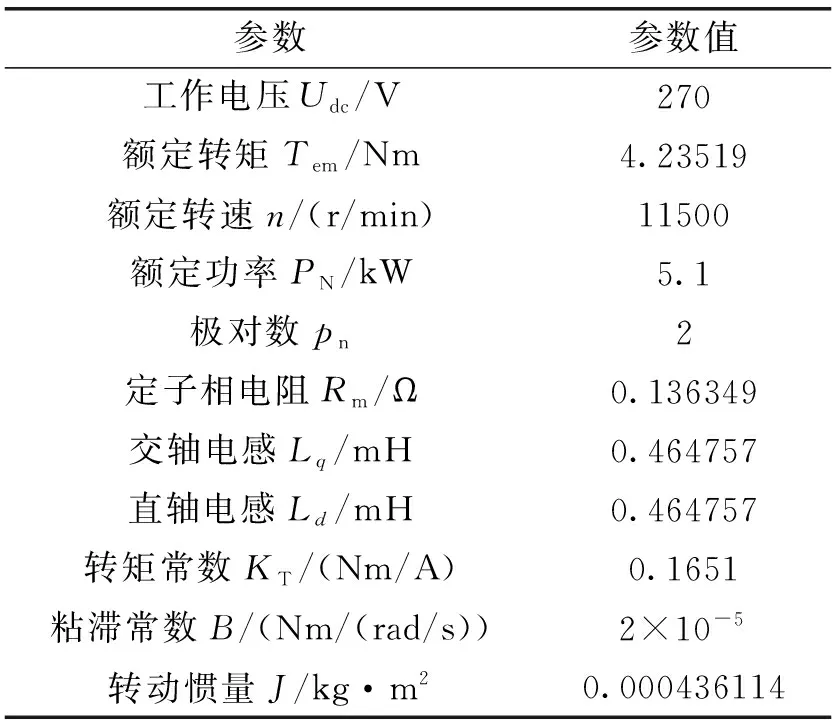
表3 电动泵负载参数
首先给出6000 r/min电力作动器的仿真结果:为验证系统稳定性,设置在仿真时间t=0.7 s时,负载转矩从突变为。仿真结果如表4所示,从图14可见id一直在0附近振荡,而iq波形在t=0.45 s时稳定,在t=0.7 s时,随着负载转矩增大,iq也发生突变。而从图15可知,转速很快稳定在6000 r/min,且在发生转矩扰动后,迅速回到稳定值,动态性能较好。
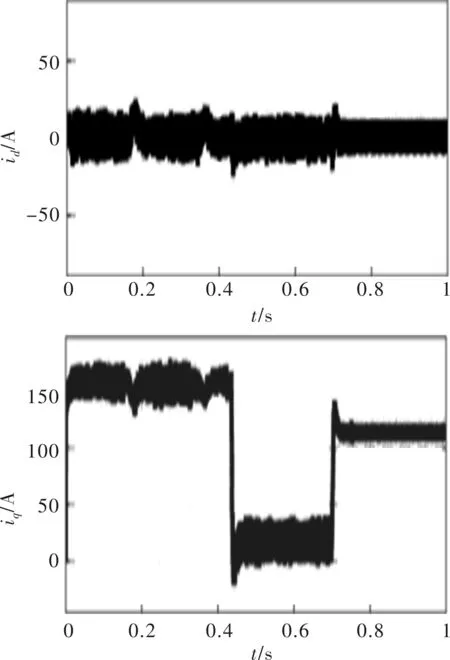
图14 电力作动器iq和id波形图

图15 电力作动器输出转速大小波形图

表4 电力作动器PI调节参数表
表4中,电流环限幅值设定同PMSG-PWM系统,但是转速环输出参考值为iq,限幅值设定同PMSG-PWM电压环。
同 6000 r/min电力作动器模型,改变电机和PI调节器的相关参数,如表5所示即可实现11500 r/min电动泵的仿真结果,其运行特征和电力作动器相似,现只给出d-q轴电流和转速大小波形图,可以看出模型的动态响应快,稳定性好(如图16和图17所示)。
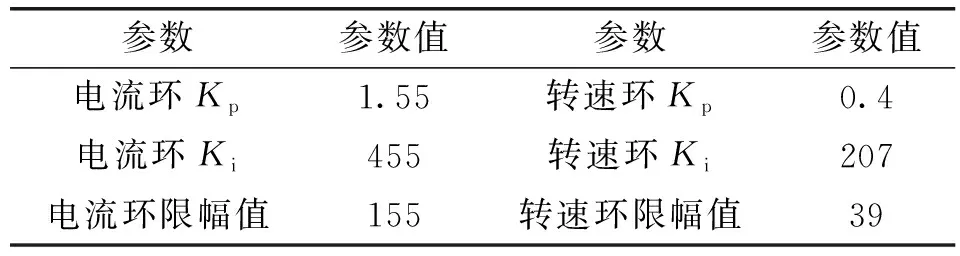
表5 电动泵PI调节参数表

图16 电动泵iq和id波形图
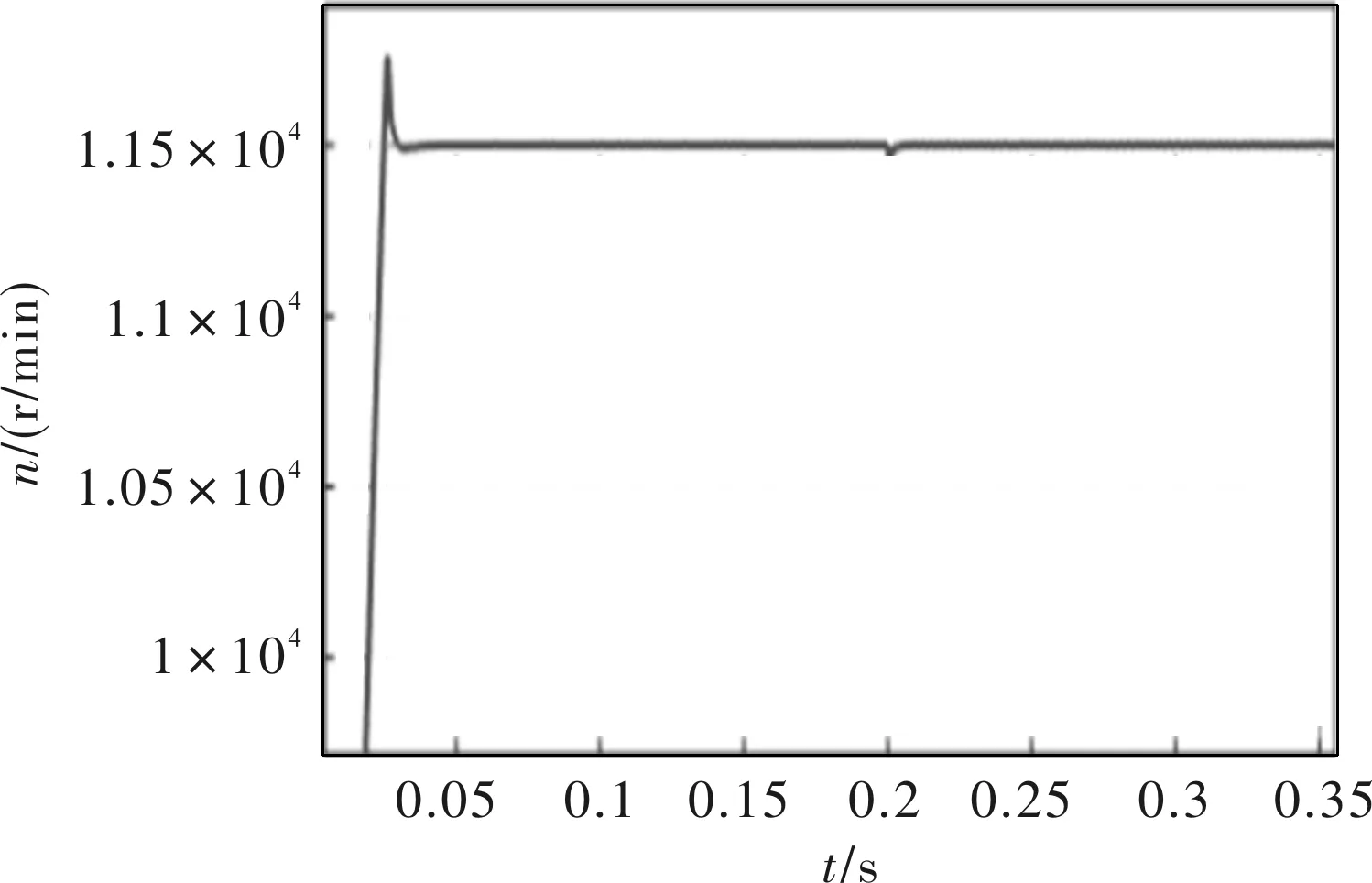
图17 电动泵输出转速大小波形图
5.3 DC/DC充放电系统仿真结果
首先,测试系统接阻性负载时的输出情况[23],可见响应快速且无稳态误差,符合要求,如图18所示。

图18 纯阻性负载下输出电压波形
再次在单方向的蓄电池供电模式下,测试电机启动和带负载的过程。270 V母线电压及电机转速波形如图19所示。

图19 电机负载下的母线电压及电机转速
可见电机起动和带载转速都正常,母线电压会在接入负载时发生波动,最后会恢复到正常值。
当发电机工作在正常状态下,电池单元处于充电状态,蓄电池的电量、电流、电压如图20所示,可见电量在上升,电压稳定在28 V,而电流因为参考方向原因为负,即电流输入到电池单元。说明双向DC/DC变换器可以正常运行。

图20 蓄电池充电时电量、电流、电压波形图
5.4 并网电气系统仿真结果
5.1至5.3小节分析了电气系统部件级的仿真结果,实验结果说明了子系统的正确和可靠性。下面进行并网电气系统的仿真分析。分别在发电机正常运行和发电机故障情况下,分析系统的响应情况,验证模型在不同工况下运行的可靠性。
在发电机正常工作情况下,母线由永磁同步发电机供电,此时变换器工作在降压模式,给蓄电池恒流充电。此时电机负载也都由永磁同步发电机供电。

图21 正常供电时的母线电压和电机转速
在电机转速上升至额定转速时,母线电压有轻微波动。负载电机转速均正常,系统稳定性较好。
当发电机发生故障,转速突降,变换器通过检测母线电压值来判断故障情况,切换模式,由蓄电池经变换器给电机负载供电。Matlab/Simulink仿真中,将母线电压值与允许的最低值进行比较,其结果通过一个RS触发器,作为切换信号。RS触发器的作用是防止变换器供电后母线电压上升超过阈值时的反复切换,如图22所示。

图22 模式切换控制器
仿真中,假设为最恶劣情况(发电机转速突降到0)。此时,加大变换器输出端的电容值(为100 mF),使得电压突降时,滤波电容同时充当储能的超级电容,短时间内给负载供电,减缓电压波动,增加系统稳定性。同时,在切换工作模式之后,再引入负载波动,仿真波形如图23、图24所示。
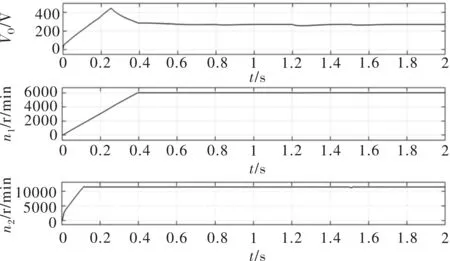
图23 蓄电池供电时负载波动下的母线电压和电机转速
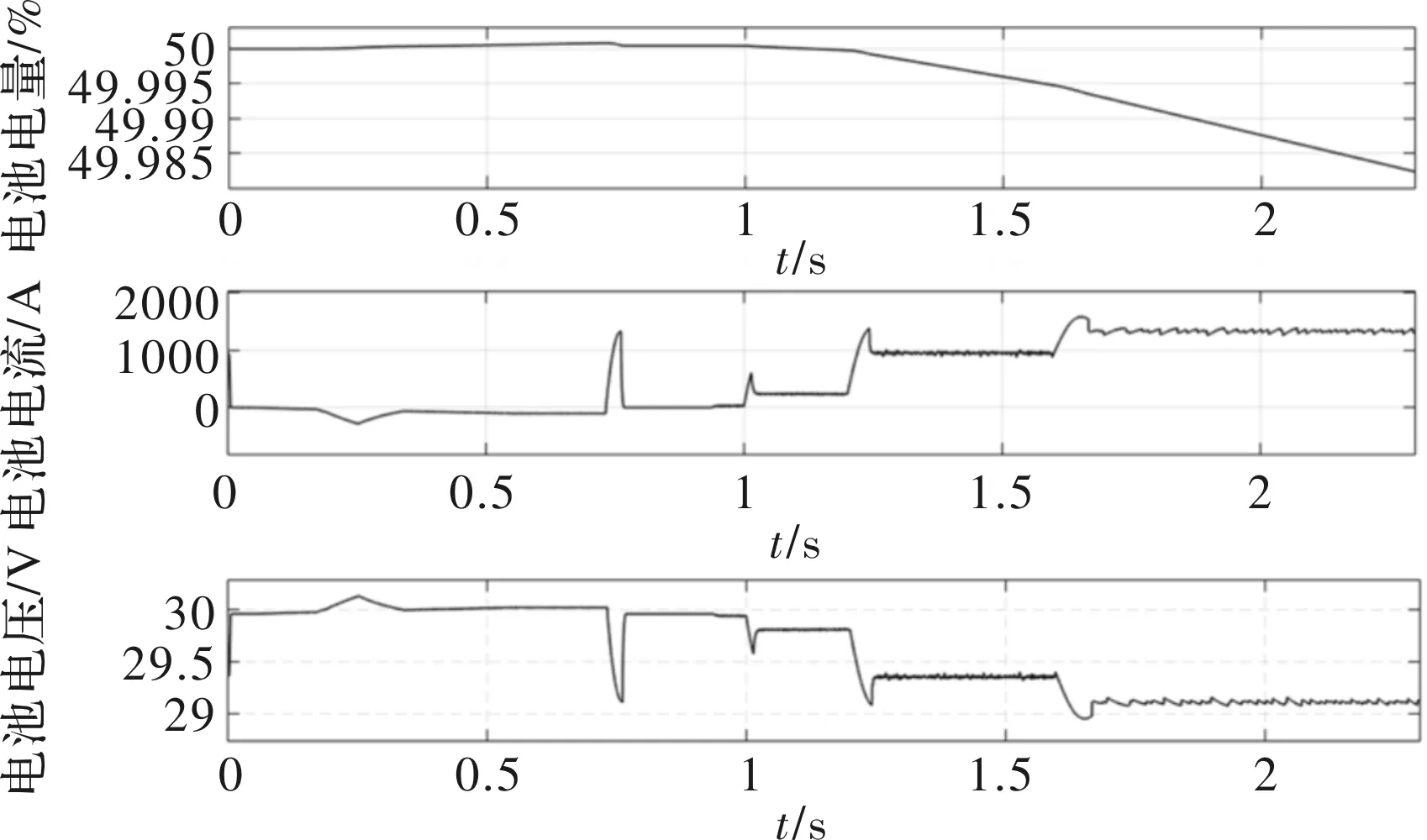
图24 蓄电池的电量,输出电流,输出电压
在发电机故障后,变换器可以及时切换状态,以使得母线电压变化在允许范围内,从而负载电机转速基本无波动。蓄电池在发电机供电时处于正常的恒流充电状态。同时,变换器可以通过检测电机负载变化,调整电流基准值,维持母线电压和电机转速基本不变,系统稳定性较好。
6 结 论
将多电飞机电气系统划分为发电机、电机负载和电池单元3个子系统。依次分析了永磁同步电机和双向DC/DC充放电系统的原理和各自的控制方法,以及电气系统在不同运行工作状态下的稳定性。运用Matlab/Simulink平台,进行了电气系统的稳定性和运行仿真实验,实验分析表明恒功率负载对电气系统的稳定性存在影响,而实验结果符合电气系统的运行特性,并能够在发电机故障和负载波动情况下快速稳定地响应。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年3期)2021-07-21
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
课程教育研究·学法教法研究(2018年20期)2018-08-11
