
基于改进滑模观测器的SynRM无位置传感器控制
2022-07-28 09:11王训栋边敦新赵巧静张国伟
微电机 2022年6期
王训栋,边敦新,2,赵巧静,张国伟
(1.山东理工大学 电气与电子工程学院,山东 淄博 255049;2.山东科汇电力自动化股份有限公司,山东 淄博 255087)
0 引 言
同步磁阻电机(Synchronous Reluctance Motor,SynRM)是一种仅依靠磁阻转矩的电机,在效率、制造成本等诸多方面具有优势。在SynRM转子位置和速度信息的获取上,早有的方法是安装机械式速度传感器,却存有问题,如会导致电机的功率密度下降,测量不准确,后期保养维修困难等。于是,诸多专家对SynRM的无位置传感器控制展开研究。
在文献[1]中,该文作者提出了一种混合控制的无位置传感器控制方案,即在SynRM低速和高速运行时分别采用高频信号注入和磁链观测器的控制策略,但文中却没有涉及因磁路饱和引起的交直轴电感Ld、Lq随电流非线性变化的问题,使最终结果存在一定误差。文献[2]建立了电压-电流模型观测器,并分析了该模型的稳定性,通过实验验证得到模型的低速反转不稳定区间,具有一定的指导意义。文献[3-4]均对电机的磁路饱和问题进行了分析,在考虑磁路饱和,特别是交叉饱和的基础上分别采用模型参考自适应法和磁链观测法对SynRM的转子位置进行估算。
滑模观测器(Sliding Mode Observer, SMO)的本质是对系统状态的重新构造[5],在永磁同步电机的控制上已有广泛应用。同步磁阻电机与永磁同步电机在结构上相似,在控制策略上也具有一定的借鉴意义。
本文将磁路饱和的情况考虑到内,对传统滑模观测器做出改进,并对系统的稳定性做了分析。在转子位置与速度求取上,采用具有一定削抖能力的正交锁相环技术。以实现电机转子位置与转速的精确观测。
1 数学模型
1.1 同步磁阻电机数学模型
在αβ静止坐标系中建立同步磁阻电机电压数学模型
(1)
式中,uα、uβ分别为αβ轴电压,Rs为定子电阻,p为微分算子,ωe为转子电角速度,iα、iβ分别为αβ轴电流,δe为转子位置角。
对式(1)作如下变化得到关于电流导数的方程
(2)

得到简化后的式(2)为
(3)
观察式(2)可以看出,一方面扩展反电动势Em中含有转子位置角δe的三角函数,在对Em求解后,通过反三角函数可以获得电机转子位置与转速,另一方面,Em中含有q轴电流微分项piq,变化的iq保证了电机在低速甚至零速依然可以进行位置估算[2],因此可以实现同步磁阻电机的全转速估算。
1.2 改进滑模观测器设计
由于传统的滑模观测器仍然使用具有不连续特性的开关函数作为控制函数,这会导致系统的高频抖振,本文依据准滑动模态思想,设计了一种分段指数型饱和函数来替代开关函数,以减小抖振所带来的影响,其式如下:
(4)
式中,x为电流误差,Δ为边界层。
该函数在边界层外采用切换控制,在边界层内采用指数形式的反馈控制。考虑到实际系统中电机三相电流较易测得,故在系统滑模面的选择上采用了观测电流与实际电流的差值,其式如下
(5)
依据式(3)、式(4)和式(5)设计基于新函数y(x)的滑模观测器:
(6)

(7)

本文基于正交锁相环技术实现电机转子位置与转速的估算,图1为正交锁相环原理图。其中,Δe为经过外差法得到的误差项,对其实行归一化处理,目的是避免转速变化引起系统极点改变,进而影响到锁相环的动态性能[6]。后经锁相环PI环节与积分项可分别得到电机估算转速与位置。归一化后的锁相环传递函数为式(8),式中,kp、ki分别为PI静态参数,可通过闭环传递函数极点配置得到。
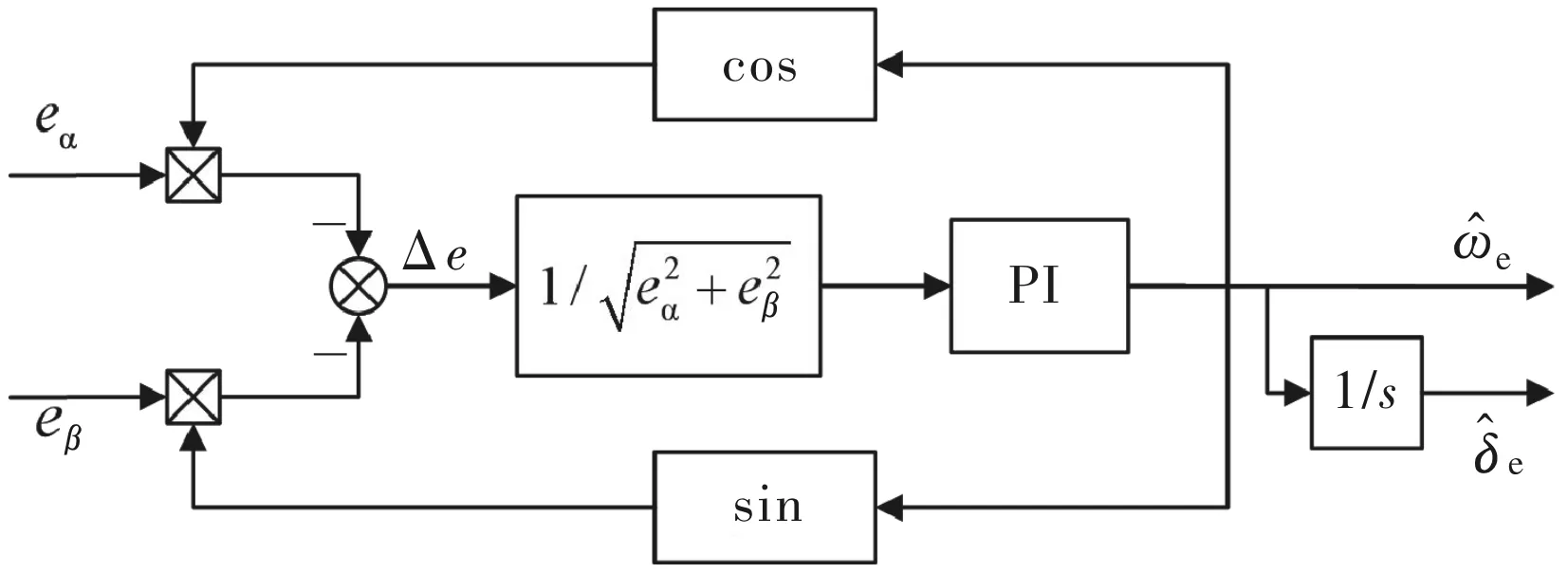
图1 归一化正交锁相环原理框图
在经过了以上的设计过程后,可以得到图2所示的滑模观测器结构框图。

图2 滑模观测器结构框图
(8)
1.3 稳定性分析

(9)
显然恒成立。联立式(5)和式(7)得
(10)

2 磁路饱和与MTPA控制策略
SynRM因其自身结构特点不可避免的存在磁路饱和的现象。在电机的运行过程中,随着定子电流增大,交直轴电感Lq、Ld会有不同程度的减小[7],且交直轴电感分别与交直轴电流都有关,这种交叉饱和是不可忽略的[8]。因此,对SynRM搭建有限元仿真模型,以实现非线性电感离线测量。通过设置电流源点阵激励,进行电感扫描,得到不同id、iq电流组合下的电感数据,如此建立能够快速查询的电流-电感二维取值表。图3、图4为经过插值法得到的电流id、iq与电感Lq、Ld的变化关系图,可以直观的看出电感受电流变换影响较大。

图3 d轴电感非线性变换曲面

图4 q轴电感非线性变换曲面
同步磁阻电机多采用最大转矩电流比控制(MTPA)算法对交直轴电流进行最优配置,以期达到相同带载情况下,电机输出电流最小的目的。同步磁阻电机电磁转矩:
(11)
式中,p为极对数,is为定子电流,θ为定子电流超前d轴的角度。
由上文论述可知,由于同步磁阻电机电感随电流非线性变换,转矩公式中含有多个变量,此时不能简单地认为θ=45°为转矩峰值[9]。通过有限元分析可以得到图5所示的MPTA曲线,可以看出,id、iq不是线性关系,在磁路不饱和,θ角为45°,随着id、iq的进一步增加,磁路出现饱和现象,θ角超过45°,并不断变大。

图5 MTPA曲线
图6为SynRM矢量控制结构框图,参考转速与反馈转速的误差经过速度环PI控制器得到转矩Tref后,根据图5中的关系,获得不同转矩对应的交直轴参考电流iqref、idref。而后交直轴电流误差经过电流环PI控制器得到电压信号Ud、Uq,电压信号进入空间矢量调制(SVPWM)环节,通过输出控制功率管开断,实现电机的闭环控制。

图6 SynRM矢量控制结构框图
3 仿真分析
根据上文所描述的滑模观测器,设计图7所示的SynRM无位置传感器控制系统框图。随后在仿真软件中搭建仿真模型,进行可行性验证。表1给出了SynRM模型的各项参数。
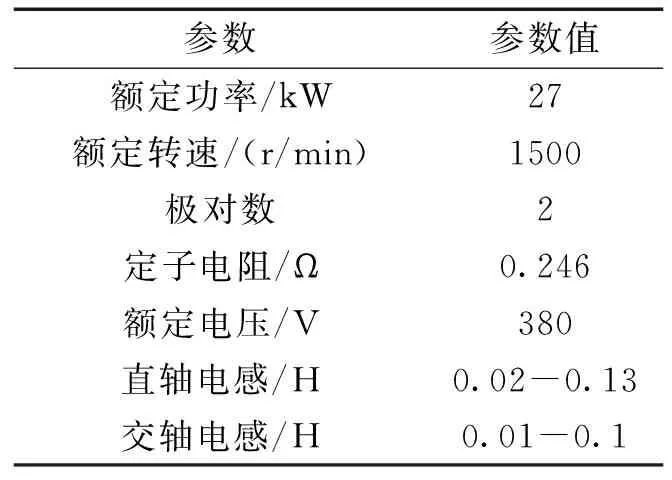
表1 SynRM模型参数
考虑到在实际工况中,SynRM的起动速度一般由用户自行设定,因此本文设计电机在空载状态下,0时刻以5000 r/min/s的斜坡加速度运行0.1 s后加速至500 r/min,在电机稳定运行后的2 s时刻,以1000 r/min/s的斜坡加速度运行1 s加速至额定转速1500 r/min。图8为电机的变速运行曲线仿真,可以看出,估算转速仅在电机起动的0~0.02 s内存在较大误差,随后逐渐减小,最终电机的估算转速与实际转速基本重合,估算转速在稳态过程能够很好地跟踪实际转速。考虑到滑模固有的抖振特性,在采用改进的滑模观测器后,稳态时估算转速与实际转速存在最大±2.3 r/min的误差,满足实际工况要求。

图8 电机变速运行曲线
图9为电机500 r/min时,0s到0.4 s内的转子实际位置与估算位置比较图。从图9可以看出,在电机升速的0~0.02 s内,转子的估算位置曲线有较明显振荡,且振荡幅度逐渐递减。在0.02 s后,估算位置能够稳定跟踪实际位置。图11为在1500 r/min情况下,3 s到3.4 s时的转子实际位置与估算比较曲线,可以看出,在额定转速下估算转子位置同样可以稳定的跟踪转子实际位置。图10与图12分别为低速500 r/min与高速1500 r/min转子位置误差曲线图。可以看出,估算转子位置与实际转子位置的误差接近为零,只是前者略滞后于后者,这是由于滑模观测器中低通滤波器造成的。
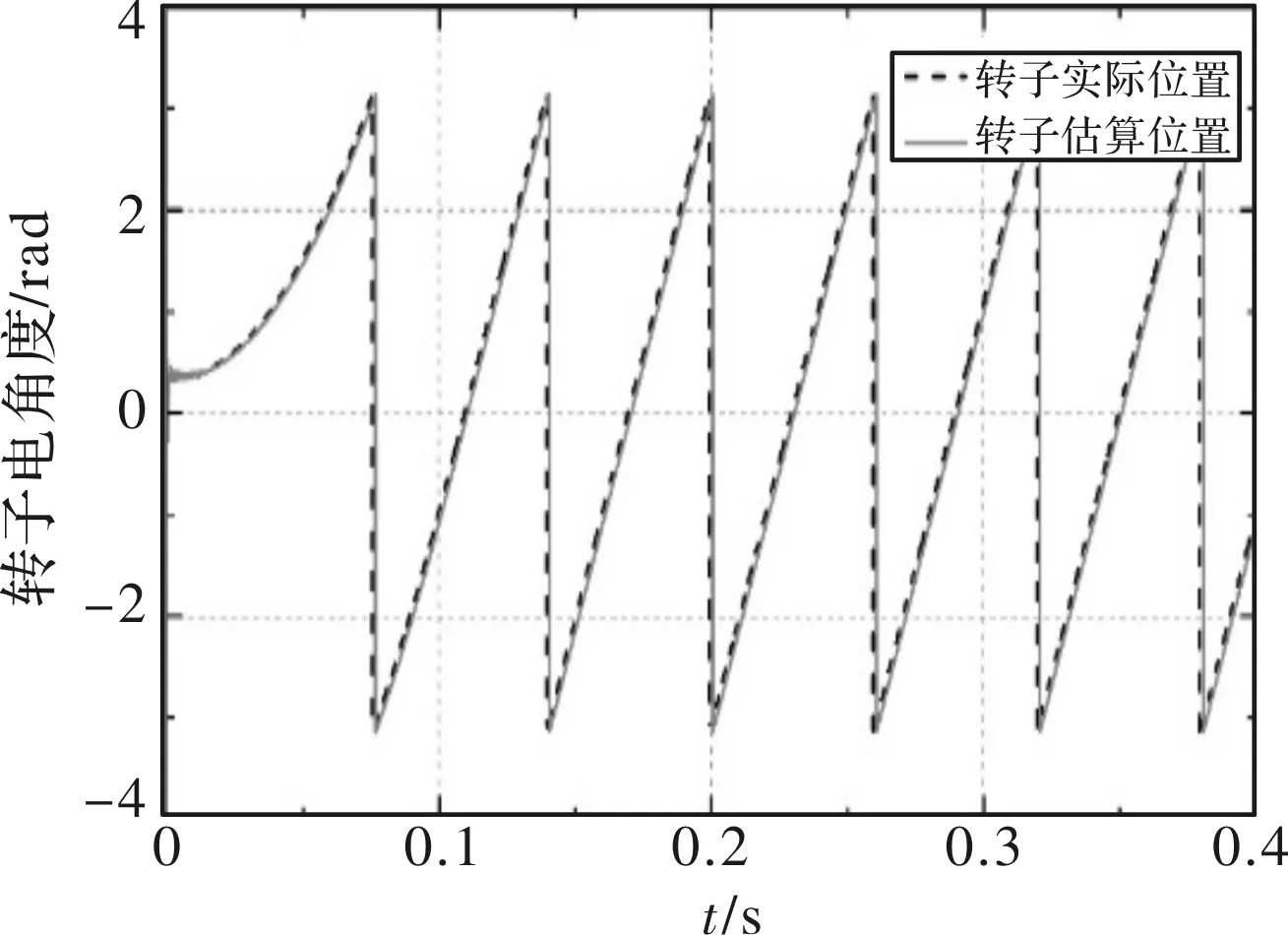
图9 500 r/min时转子实际位置与估算位置比较曲线

图10 500 r/min时转子实际位置与估算位置误差线

图12 1500 r/min时转子实际位置与估算位置误差曲线
图11为电机在0 s到4 s变速运行下的交直轴电流变化曲线。在0 s到0.1 s和2 s到3 s电机不同程度的升速中,由于转动惯量的存在,使得电机的电流都要比稳态时的大。此外采用MTPA的控制对电流id、iq进行最优配置,使得id、iq并不相等,从图11中可以看出,iq始终大于id。图13为电机变速运行时dq轴电流曲线图。
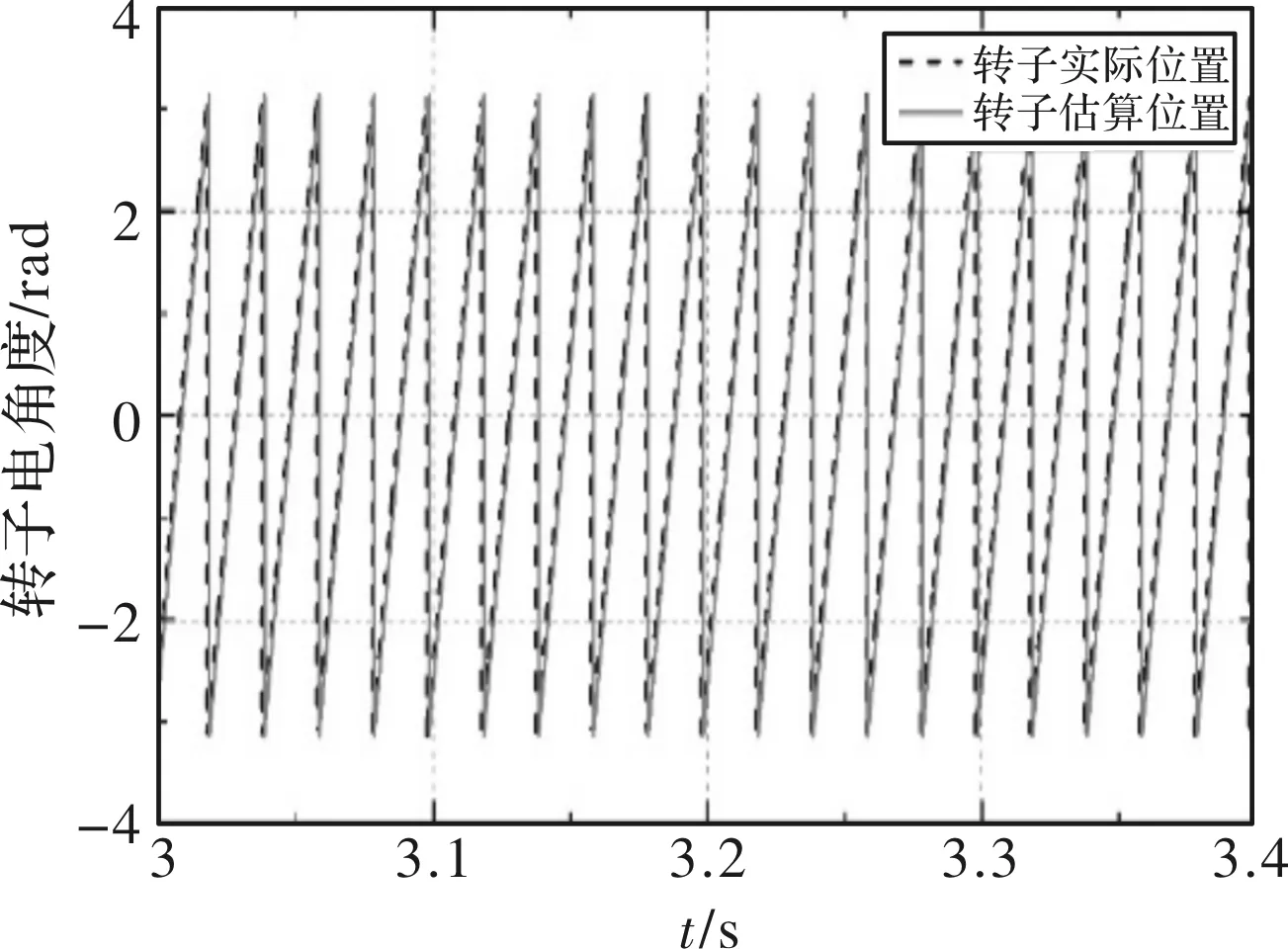
图11 1500 r/min时转子实际位置与估算位置比较曲线
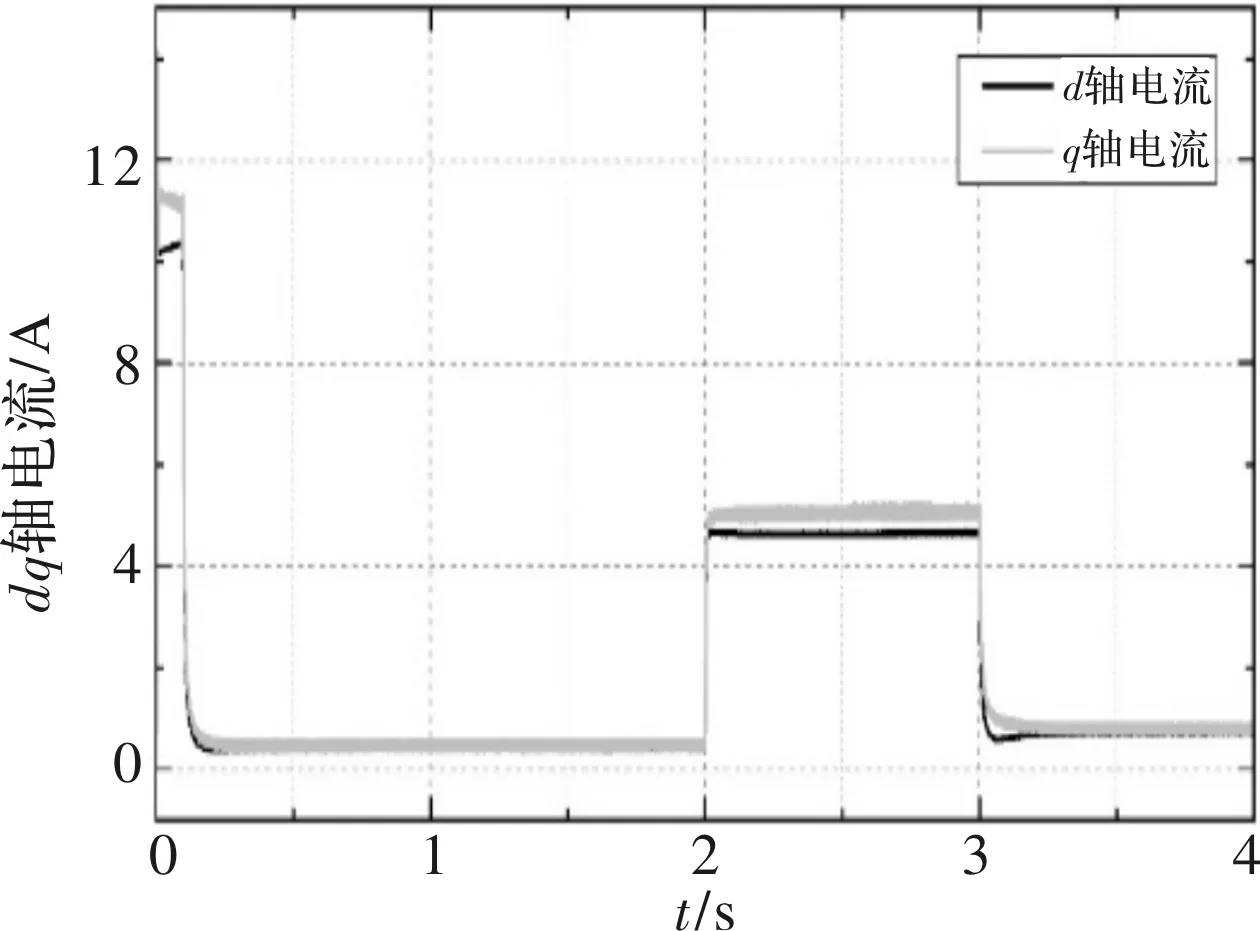
图13 电机变速运行时dq轴电流
图14为电机在变速运行时的反电动势估算波形,通过上文理论推到可知,该波形是滑模观测器的切换函数在获得高频信号后,经低通滤波器滤波处理得到的。由于SynRM转子的估算位置又是反电动势经过锁相环得到的,因此反电动势的质量决定了转子估算位置的质量。观察图14可以看出,除在电机起动时反电动势Eα、Eβ存在很短时间的不规则波动外,其他时间段内均呈现为平滑的正弦波,谐波含量少,可以用以估算转子位置和速度。

图14 电机变速运行时反电动势估算波形
为研究采用滑模观测器时同步磁阻电机的抗扰动能力,对其进行突加负载仿真分析。设定同步磁阻电机初始时刻为额定1500 r/min且空载运行,分别在1 s和2.5 s时加入5 Nm的负载扰动。得到如图15、图16的转速与转矩变化曲线。从图15可以看出,SynRM的转速仅在突加负载后的极短时间内出现较大幅度的波动,随后经过短暂调整后便趋于稳定,说明系统抗干扰能力强,鲁棒性好。从图16则可以看出,转矩在1 s和2.5 s分别突变为5 Nm和10 Nm。

图15 突加负载时的转速变化曲线

图16 突加负载时的转矩变化曲线
4 结 语
针对SynRM的转子位置信息,本文采用改进滑模观测器方法实行估算,用分段指数型饱和函数替代符号函数,并加入正交锁相环,削弱滑模抖振,通过Lyapunov法判定系统稳定条件。为实现MTPA控制,通过有限元软件获得磁饱和时的电感值与最优电流角。仿真结果表明,本文所设计方法可以准确跟踪电机转子位置与转速。
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
计算机仿真(2021年3期)2021-11-17
建材发展导向(2021年14期)2021-08-23
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
电子制作(2019年15期)2019-08-27
