6 MW海上风机近海多桩式平台动力特性研究
2022-06-28 08:17张洪达滕丽霞
山东电力技术 2022年6期
张洪达,王 勇,赵 华,滕丽霞
(山东电力工程咨询院有限公司,山东 济南 250013)
0 引言
风能作为一种能够替代传统能源的可再生清洁能源,其开发的必要性已取得世界各国的共识[1]。海上风电因具有海风湍流强度小、不占用土地资源、发电稳定等诸多优点,近几年来成为风电场建设的焦点[2]。浮式风机结构高耸,还会受叶片转动时产生的气动载荷干扰,技术难度和建造成本也更高[3],所以适用于水深不大于50 m 的近海、潮汐带等海域的固定式基础海上风机是海上风电主要的结构型式[4]。多桩式基础属于固定式基础中的一种常见类型,由多根斜撑钢管桩连接到顶部支撑着风机的中心筒体上,适用于10~40 m 近海海域,优点是结构简单、承载能力强且能适应各种海底地质,缺点是桩腿较长造成结构自重较大[5]。
当风轮旋转频率与风机整体固有频率接近时会发生共振现象,不同程度地影响风机机组的安全性和机组发电能力,所以研究风机整体的动力响应特性具有重要现实意义[6]。海上结构物表面接触的一部分海水会随着结构物发生共振,改变结构物的振动特性,这部分海水的质量称为附加质量[7]。姚雄亮、张磊、缪旭弘等学者提出利用Abaqus 软件和声固耦合算法计算海上结构物的固有频率,能取得与试验数据吻合较好的计算结果[8-10]。但是,由于海上结构物与海水耦合面的迭代积分计算复杂,因此,评估海上结构物固有频率时,若考虑流固耦合作用就会导致计算成本过高,因而寻找简化仿真分析方法就显得格外重要[11]。
1 近海多桩式风机
以某6 MW近海固定式多桩风机为研究对象,根据流固耦合理论建立Abaqus 仿真模型,对近海多桩式平台的动力响应及结构振动特征进行分析,探索平台的动力响应规律。
所研究6 MW 海上风机的整机参数如表1 所示。综合考虑风机作业海域的地质条件和外部环境载荷后,6 MW 风机基础由8 根钢管桩和一个圆形平台组成,圆形平台和钢管桩内部填充C50 高性能海工混凝土。风机基础的基本参数如表2所示。

表1 风机整机参数
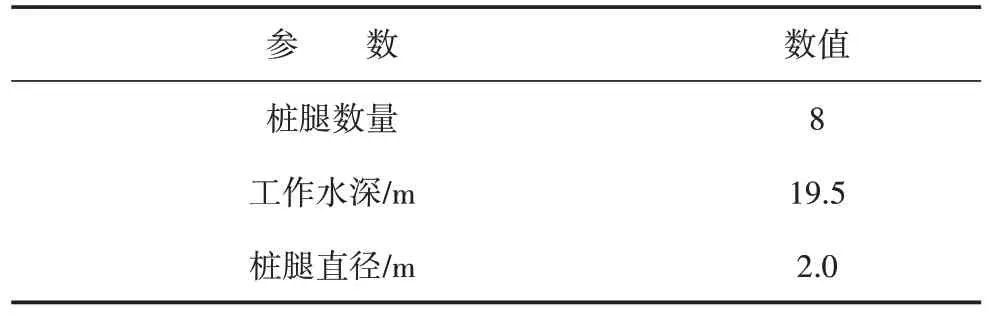
表2 风机基础参数
2 风机动力学特性
2.1 有限元动力特征方程
采用有限元方法求解动力响应特征解时,先对计算模型进行有限元离散化处理,根据瞬时最小势能原理,推导出运动微分方程[12-13]为

式中:M为整体质量矩阵;K为整体刚度矩阵;C为整体阻尼矩阵;Q为有限元节点位移矩阵;Q′为节点速度矩阵;Q″为节点加速度矩阵;F为结构受到的外部载荷矩阵。当式(1)中的F为全0矩阵,即结构没有受到任何外力作用时,结构处于自动振动状态,此时,结构能够反映出自身固有振型。
2.2 不考虑基础的风机动力响应
评估风机与多桩式平台联合作用时的固有频率前,需要先验证风机子系统固有频率结果的准确性。分别通过Abaqus、Ansys和Bladed三种软件建立不考虑风机基础的风机模型,计算风机子系统的整机固有频率,通过对比分析验证风机动力响应分析模型的正确性。
采用Abaqus 软件建立的风机有限元网格模型如图1 所示。模型中用壳单元模拟塔架,根据实际尺寸对塔架各分段定义不同的厚度属性,忽略如爬梯、台架这类附件,塔架底部节点进行全自由度约束。机舱部分设定成一个由实体单元组成的质量块,要求机舱模型的重量和重心位置与实际数据相差不超过0.1%。轮毂和叶片简化成质量点,然后将质量点与机舱质量块刚性关联起来。

图1 风机Abaqus有限元模型
提出一种基于Ansys软件的风机简化模型,即用一根变截面空心管梁单元模拟塔架,定义梁单元各分段管截面内外直径来确定塔架各分段的板厚,梁单元顶部放置一个质量等于风轮、叶片和机舱重量之和的质量点单元。
由表3 得知,Abaqus 风机模型、Ansys 简化风机模型与风电行业标杆软件Bladed 模型计算结果量级一致且数值接近,从侧面验证了Abaqus 和Ansys 模型的合理性。

表3 三种风机子系统模型的固有频率 单位:Hz
需要注意的是,从图2 看出,Ansys 简化模型计算得到的固有频率比其他两种软件模型的结果高,尤其是从第3 阶开始和其他软件模型存在明显偏离。造成这种现象的根本原因就是Ansys模型简化严重,无法反应风机结构质量分布的真实情况,比如机舱部分直接简化成布置在塔架梁单元顶部的一个质量点,并没有考虑机舱重心偏移,也没有考虑整个机舱的质量分布和刚度弹性。

图2 三种风机计算模型的固有频率结果
但是,由于工程计算只关心风机前2 阶的低阶固有频率,Ansys 简化模型前2 阶固有频率结果还是能取得较为满意的吻合度,Ansys简化模型的建模工作量比更符合真实情况的Abaqus 模型小得多,因此工程上仍然可以建立Ansys 简化模型快速对风机系统进行低阶固有频率动力特性评估。
2.3 平台基础对固有频率的影响
为了研究基础-风机耦合系统中风机和基础的相互作用关系,设立了三种固有频率Abaqus 计算模型,分别是单独风机模型、单独基础模型、风机和基础组成的耦合系统模型。
作为风机基础的多桩式平台是一种复合单元结构模型,创建风机基础的Abaqus 模型时桩腿和圆柱形平台内部采用三维应力实体单元模拟混凝土,并在实体单元外表面铺上一层壳单元模拟混凝土外部包裹的钢板,保证壳单元与实体单元节点重合,桩腿底部固定。
采用上述三种固有频率计算模型进行计算,结果如图3 所示。由图3 可以看出,多桩式基础的固有频率始终高于风机,尤其是从第4 阶开始,多桩式基础固有频率急剧升高,说明多桩式基础刚度远大于风机,不会出现因为基础刚度不足而先于风机共振甚至坍塌。

图3 固有频率计算结果
图3 中,虽然单独基础模型固有频率较高,但风机和基础组成的耦合系统固有频率直接降低到单独风机模型的固有频率量级,说明耦合系统的整体固有频率主要受风机子系统影响,这是由于风机高度较大导致整体结构刚度急剧降低。
3 基于流固耦合理论的动力特征计算
与陆上风机不同,近海多桩式风机-基础耦合系统还要承受外界海洋环境的影响,动力响应过程更为复杂,所以建立基于结构-流场全耦合的流固耦合理论背景下的动力响应模型是十分有必要的[14]。
固定式海上风机桩基涉及岩土问题,但岩土对海上风机桩基的影响较为复杂且难以准确模拟,不同软件和计算方法得出的结果差异明显。所以,为了排除岩土边界条件对最终计算结果的干扰,本文将基础底部固定约束,不考虑岩土的影响。
3.1 流固耦合理论
对于无黏性、无旋的不可压缩理想流体,速度势φ可以表示为流体质点时间t和位置的函数方程式φ(x,y,z,t),即

式中:u,v,w分别为流体质点在该位置处x,y,z方向上的流速[15]。
将式(2)代入理想流体的连续性方程为

得到拉普拉斯方程为

由伯努利方程得到该流体质点的动水压力为

式中:ρ为流体密度;g为重力加速度;pi为采样点i流体动水压力。
由于结构浸没部分与流体之间存在流固耦合作用,考虑流体对结构表面的压力矩阵p后,式(1)的结构模型运动微分方程可改写为

3.2 算例模型
流固耦合模型中的结构和流体模型通常在耦合界面上的节点位置很难保证完全重合。流体模型节点位移是通过结构模型节点位移插值出来的,结构模型节点受到的流体反作用力是通过耦合界面上该节点附近的流体单元应力插值得到的[16]。
采用Abaqus 软件建立的风机-基础-水域流固耦合有限元模型和边界条件如图4 所示。水域和风机基础结构模型可以采用不同网格单元,只需在耦合界面的接触面上采用绑定接触,就可以将流体和结构两个子系统相互作用产生的作用力进行传递。上文已经讲述风机和基础模型的建模方法,这里只阐述水域的建模方法。流体单元采用声学AC3D8R单元,水域外表面须施加无反射边界面以模拟无限水域。水域分为内域与外域,内域网格较密而外域网格稀松,在保证计算精度的前提下提高计算速度。

图4 风机-基础-水域Abaqus流固耦合模型
3.3 结果分析
考虑水域的流固耦合Abaqus 模型、不考虑水域的风机-基础Abaqus 模型的前5 阶振型分别如图5、图6 所示。由图5 和图6 可以看出,风机比平台先发生了摆振,考虑水域时的1—5 阶振型和没有考虑水域时一致,说明水域并没有改变风机-基础耦合系统的动力学响应特性。一、二阶振型时风机塔架发生摆振,而摆振提供了塔架振动过程中最大的能量,所以需要重点注意避免发生摆振。由于风机系统存在对称性,所以每相邻两阶振型相同且自振频率基本相等。

图5 考虑水域的流固耦合Abaqus模型1-5阶振型
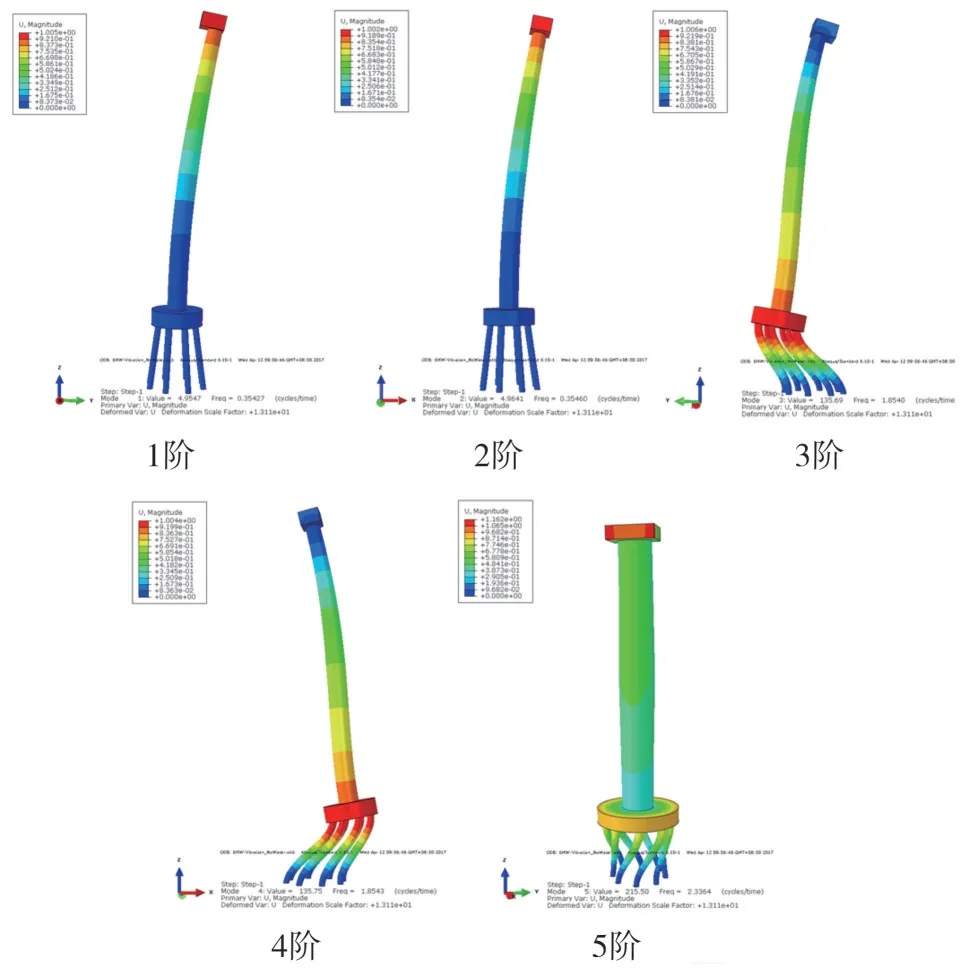
图6 不考虑水域的风机-基础Abaqus模型1-5阶振型
图7 为当考虑水域和不考虑水域时风机-基础耦合系统前10阶固有频率结果。由图7知,由于海水的存在,风机-基础耦合系统的整体低阶固有频率稍微低于不考虑海水时的低阶固有频率。由于海水与桩腿接触面积较小,又加上平台的多斜撑钢管桩结构形式有利于抵抗结构受力和水平位移,所以海水对风机-基础耦合系统低阶固有频率影响较小,与单桩等其他与海水接触面积较大的海上风机固定式平台存在较大差异。因此,工程上初步计算这类近海多桩式平台的低阶固有频率时,可以忽略海水附加质量的影响。
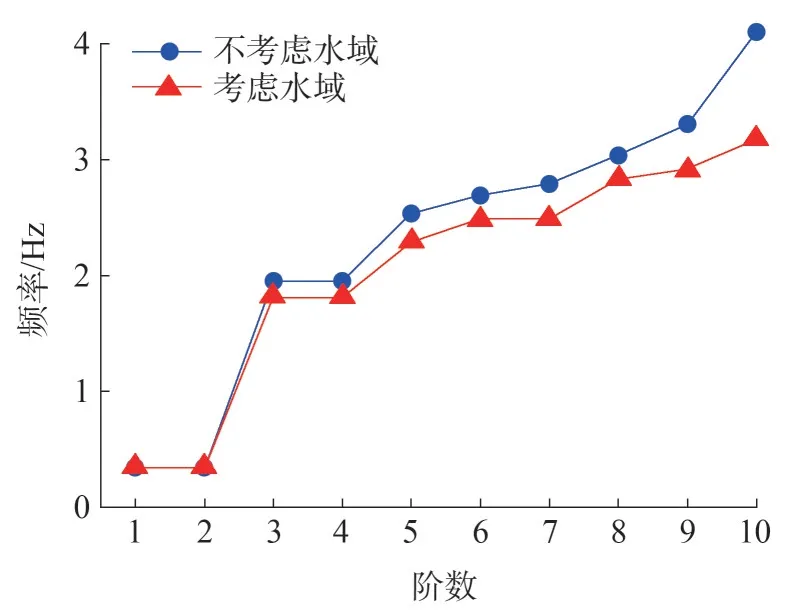
图7 水域对风机-基础耦合系统前10阶固有频率的影响
4 简化动力学模型
由于海水对近海多桩式风机的低阶固有频率影响有限,虽然建立完整的流固耦合Abaqus 模型计算精度更高但工作量非常巨大,并不适合用于实际工程中作为初步设计校核方法。Bladed 软件无法考虑海上风机独有的流固耦合等复杂情况[17],因此,提出一种基于Ansys 软件的采用板梁单元的简化建模方法。
4.1 变截面梁理论
根据欧拉梁理论,长度为L、轴线为x方向、横向为y方向的梁自由振动方程为[18]

式中:y(x,t)为梁横向挠度函数;K(x)和ρ(x)分别为梁横向弯曲刚度和线密度。
等截面梁K(x)和ρ(x)均为常数,式(7)可改写为

式(8)的通解为

式中:T(t)=sin(ωt+φ),ω为横向振动固有频率;φ为初始角;Y(x)为横向振动模态函数,则

根据式(10)可以推导出等截面梁固有频率的特征方程,但是无法用于求解变截面梁的振动方程。
变截面梁可以看成是若干份分段梁的连接体,如图8所示,当分段足够多时就可以将每一分段看成是等截面梁。假定将变截面梁分成N份,则第i分段的变截面梁的等效弯曲刚度和等效线密度可表示为
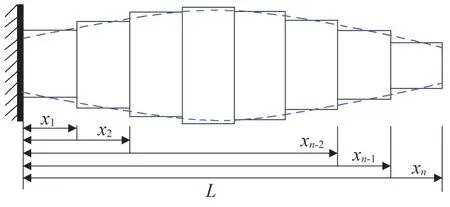
图8 多段等效梁

式中:li、Ki、ρi分别为第i段梁的长度、弯曲刚度、线密度;xi-1、xi分别为第i段梁的起始长度和终止长度。式(10)记录的等截面梁模态函数可以改写成第i段变截面梁的模态函数方程为
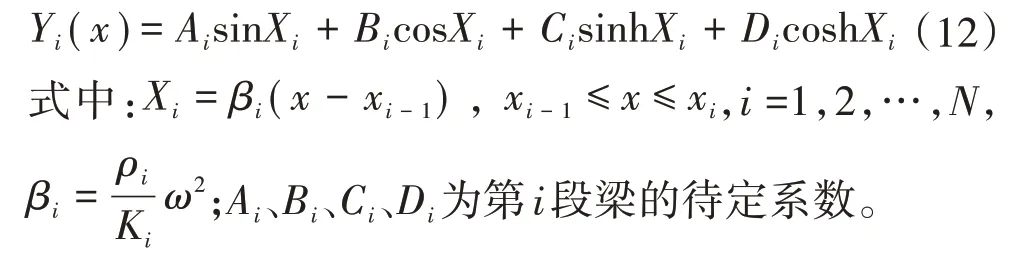
根据第i和i+1 分段在连接点处的弯矩、剪力和位移转角存在连续性,得出:

式中:Y′i(xi)和Y″i(xi)分别为第i段变截面梁的模态函数Yi(x)的一阶导数和二阶导数。
将式(12)代入式(13)就能求解出变截面梁整体固有频率。
4.2 风机-基础简化分析模型
风机属于一种复杂结构物,前处理建模流程十分繁琐,可以借助Ansys 软件自带的APDL 语言将模型参数化,实现自动化建模,提高工作效率[19]。上文阐述了利用变截面梁和质量点建立不考虑风机基础的风机塔架Ansys简化模型的建模方法,这里在风机简化模型的基础上继续添加风机基础,基础中的圆柱形台体使用壳单元,桩腿采用等截面梁单元模拟,最终得到如图9所示的风机-基础Ansys简化模型。由于台体和桩腿内部混凝土的重量在整个基础总重量中的占比远大于外层包裹的曲面钢板,所以可以忽略掉外层钢板,台体和桩腿直接采用混凝土的材料属性。

图9 简化Ansys有限元模型
4.3 结果分析
风机-基础Ansys 简化模型与Abaqus 流固耦合模型前10 阶固有频率结果如图10 所示。从图10 可知,风机-基础Ansys 简化模型计算得到的前2 阶固有频率结果与复杂、计算结果更精确的Abaqus 流固耦合模型吻合度好且工作量小,适合用于工程上对此类近海桩式风机低阶固有频率进行快速评估。

图10 Ansys简化模型与Abaqus流固耦合模型前10阶
文献[20]采用等截面均匀梁和变截面梁的算例,验证了通过理论编程计算得到的梁单元固有频率和解析解误差很小,数值计算结果精度也高,特别是低阶固有频率误差几乎为零,这也为本简化方法提供了理论支撑。
5 结语
以某6 MW 近海多桩式海上风机平台为研究对象,首先建立不考虑风机基础的风机Abaqus 模型和Ansys 简化模型,计算得到的前2 阶低阶固有频率取得较为满意的吻合度,从而证明了建模方法的正确性。然后,建立不考虑海水的风机-基础Abaqus 模型,分析得知基础固有频率一定要高于风机,才能保证基础不会比风机先出现摆振,进而确保风机和基础平台的整体安全性。接着,建立考虑流固耦合效应的风机-基础-水域Abaqus 模型,对风机基础与海水相互耦合作用下的风机-基础平台整体结构响应特性进行对比研究。计算结果表明,海水会降低风机-基础耦合系统的整体低阶固有频率,但多桩式平台与水域接触面积小且自身刚度较大,所以海水对整体低阶频率影响有限。最终,提出一种基于Ansys 软件、采用板梁单元的风机-基础简化建模方法,本简化方法与Abaqus 流固耦合模型进行对比验证,前2阶固有频率结果接近且工作量极小,适合用于工程上对这类海上平台的低阶固有频率进行快速初步评估。但是,本简化建模方法过分弱化了风机、基础的刚度,从第3 阶固有频率开始迅速偏离真实情况,所以工程计算时只能采用本简化方法评估这类海上平台的前2阶固有频率。
猜你喜欢
机械传动(2022年10期)2022-10-21
化工机械(2022年1期)2022-03-21
煤田地质与勘探(2021年6期)2022-01-04
水上消防(2021年3期)2021-08-21
天津理工大学学报(2021年1期)2021-02-25
水上消防(2020年4期)2021-01-04
矿产勘查(2020年11期)2020-12-25
水上消防(2020年5期)2020-12-14
小学教学研究·教研版(2020年10期)2020-10-13
科学导报·学术(2020年70期)2020-06-21